Изобретение относится к геодезиескому приборостроению и может быть использовано для выполнения наземной топографической съемки местности Цель изобретения - повьпи ение точности измерений
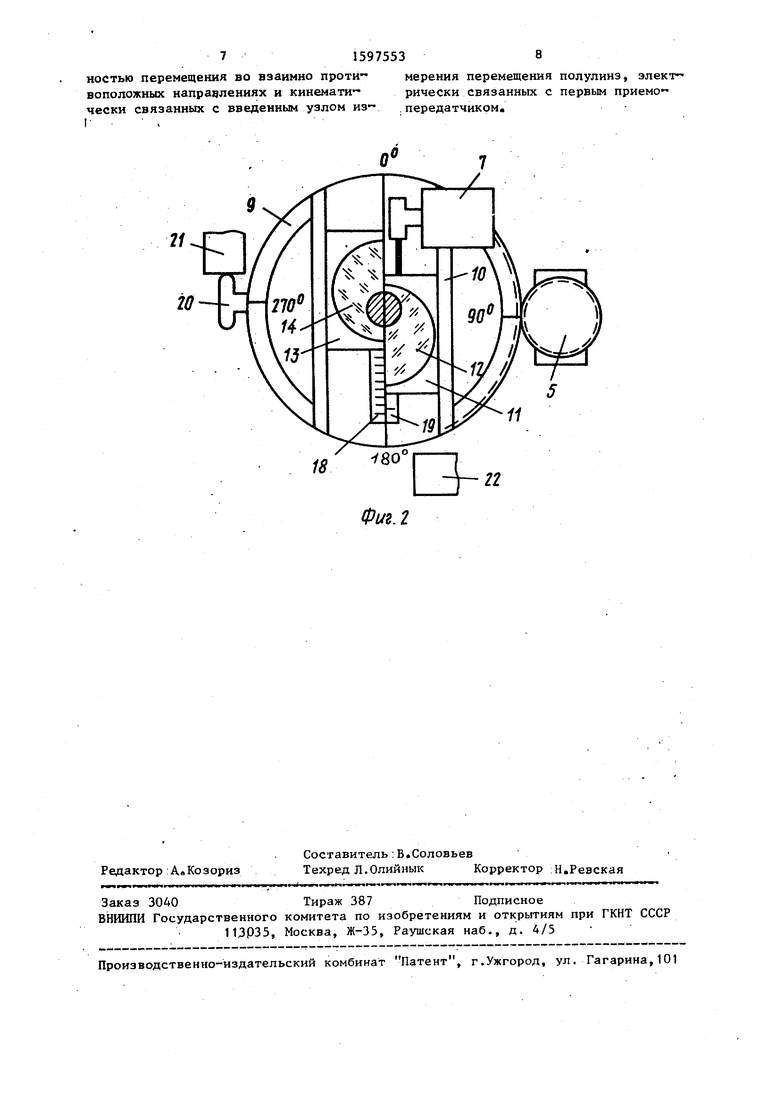
На показан схематично тахеометр, продольный разрез; на кольдо с направляющими .для перемещения полулинз
.Тахеометр содержит угломерный блок 1, колонку 2, визирное-устройство 3, лазер с коллиматором 4, микроэлектродвигатели (МЭД) 5-7 и приемопередатчик: 8 С микроэлектродвигателем 5 кинематически связано поворотное кольцо 9, внутри которого закреплены направляющие 10, на которых имеются оправа 11 с полулинзой 12 и опраёа 13 с полулинзой 14, кинематически связанные с ЮД 7. За полулинзами 12 и 14 по ходу лазерного луча установлены пара клиньев 15 в ortpa- ве 16 и пентапризма 17, кинематически связанная с МЭД 6 На оправе 13 полулинзы 14 укреплена импульсная шкала 18, а на оправе П - полулин- зы 12- считывающий блок 19, связанный с приемопередатчиком 8 На кольце 9 жестко закреплен упор 20, а на алидадной части тахеометра - ограничители 21 и 22. Вместо ЮД 5 можно установить магнитное реле, работающее в режиме Включено - выключено. Оправы 11 и 13с полулинзами 12 и
14имеют возможность перемещения по направляющим 10 под действием ЮД:7 При зтом их перемещение взаимно про- швоположное и симметричное относительно лазерного луча Пара клиньев
15имеет возможность поворота в про0
тивоположных направлениях вокруг вертикальной оси
. Тахеометр работает следующим образом.
На определяемой точке устанавливают фотоэлектрическую рейку с прие- , мопередатчиком а мини-ЭВМ. В исходной точке тахеометр приводят в рабочее положение С помощью угломерной части 1 и визирного устройства 3 диаметр 0-180° кольца 9 ориентируют по .направл ениЮ осевого меридиана и включают систему электропитания. Полулинзы 12 и 14 смещены симметрично относительно входящего в низ лазерного луча, а потому направляют в свой фокус лучи, параллельные их оптическим осям, . разделяют один лазерный луч на два, расходящихся под углом у()о МДЭ 6 вращает пента- призму 17 вокруг вертикальной оси с заданной скоростью, так что два лазерных луча .образуют две лазерные плоскости, составляющие между собой угол уи симметрично расположенные относительно горизонтальной плоскости
Угол- ЕуМежду плоскостями изменя ется пропорционально синусу дирек- ционного угла d направления на определяемую точку, а отрезок на фотоэлектрической рейке между следами 50 плоскостей соответствует приращению лу, засылаемому в мини-ЭВМ Средний из о.тсчетов по верхней и нижней плоскостям соответствует отсчету по горизонтальной плоскости, вычисляет- 55 ся мини-ЭВМ и используется для определения сначала превышения ЛЬ между .точками, а, затем для вычисления абсолютной отметки h определяемой точ35
40
45
51597553
ки. По величинамлу и у исходной когда обе плоскости пересекут фото5
10
15
точки МИНИ-ЭВМ вычисляет у определяв мой точки. Для разрешения неоднознач ности одновременно с углом у в про странство поступает радиосигнал от приемопередатчика 8 о том, что в пространстве плоскостями об-разован угол ЕуДля отсчитьшания 4у,
Через определенный интервал вре мени МЭД 5 (либо магнитное реле) по ворачивает автоматически кольцо 9 на 90 (до контакта упора 20 с ограничителем 22) и Б пространстве появляются лазерные плоскости с углом Sj между ними и радиосигнал, что определяет величина лх. Сигналы с фотоэлектрической ре.йки и от радиоприемника направляются в , которая вычисл.яет ,х и X, а также повтор-20 но и h определяемой точки, Рееч- ник может держать рейку на определяемой точке до тех пор, пока мини- ЭВМ вычислит х,у и h несколько раз и усреднит их значения. Этому способствует автоматическое непрерывное и поочередное переключение уна д- и обратно путем поворота .кольца 9с полулинзами 2 и 14 под действием МЭД 5 (или магнитного реле). Если длины рейки не хватает для определения координат или недостаточна точ ность измерений (следы плоскостей на рейке слишком близ.ки друг к другу), то по радиокоманде реечника в тахеометре можно автоматически изменить угол 6 до -требуемой величины путем взаимного перемещения полулинз 12-и 14 под-действием МЭД 7, При этом смещение полулинз 12 и 14 будет заэлектрическую рейку
Угол наклона f параллактического угла засылается автоматически в мини-ЭВМ, которая вычисляет приращения координат и превышения по формулам.
Лх х соБ «Я ; у Л у cos Г ; jh i +
Vax + /ЗУ tgt - а,
где i - высота тахеометра на исходной точке; а - средний из двух отсчетов по
фоторейке«
После этого мини-ЭВМ вычисляет координаты X, у, ho
Таким образом, предлагаемый тахеометр позволяет расширить диапазон измерений по высоте, так как параллактический угол можно наклонять- 25 вверх-вниз относительно горизонта а -также повысить точность измерений так как более высокая плотность излучения гарантирует более высокую точность считывания информации с фотоэлектрической рейки, а изменением коэффициента тахеометра можно регулировать точность измерений в требуемых пределах.
30
35
Формула изобретения
Тахеометр, содержащий расположенные на оптической оси лазер, колли- мирующук систему,, пентапризму с осью
40 вращения, совмещенной с оптической осью, узел формирования параллактического угла, установленный с возможностью поворота на прямой угол вокруг оси, совмещенйой с оптическо
фиксировано в угловых единицах угла f импульсной шкалой 18 и считы- вакщим блоком 19 и передатчиком Ь. передано к реечнику в мини-ЭВМ, которая вычислит новое значение коэффициента тахеометра (ctg Е) и учтет его при определении координат.
Изменение коэффициента до требуемого значения происходит плавно и может колебаться в больших пределах. Если угол (х,у) удовлетворяет всем требованиям, но из-за рельефа не попадает на рейку, то по команде рееч- ника полный параллактический угол (не меняя его по величине) можно разворотом клиньев 15 (вручную или автоматически) наклонить в вертикальной плоскости до такого положения,
когда обе плоскости пересекут фото5
0
20
электрическую рейку
Угол наклона f параллактического угла засылается автоматически в мини-ЭВМ, которая вычисляет приращения координат и превышения по формулам.
Лх х соБ «Я ; у Л у cos Г ; jh i +
Vax + /ЗУ tgt - а,
где i - высота тахеометра на исходной точке; а - средний из двух отсчетов по
фоторейке«
После этого мини-ЭВМ вычисляет координаты X, у, ho
Таким образом, предлагаемый тахеометр позволяет расширить диапазон измерений по высоте, так как параллактический угол можно наклонять- вверх-вниз относительно горизонта, а -также повысить точность измерений, так как более высокая плотность излучения гарантирует более высокую точность считывания информации с фотоэлектрической рейки, а изменением коэффициента тахеометра можно регулировать точность измерений в требуемых пределах.
0
35
Формула изобретения
Тахеометр, содержащий расположенные на оптической оси лазер, колли- мирующук систему,, пентапризму с осью
вращения, совмещенной с оптической осью, узел формирования параллактического угла, установленный с возможностью поворота на прямой угол вокруг оси, совмещенйой с оптической
осью, угломерный блок с визирным узлом, первый приемопередатчик, фотоэлектрическую рейку с вторым приемопередатчиком и вычислительньш блок, отличающийся тем, что,
с целью повышения точности, а него введен двухклиновый компенсатор, установленный на оптической оси между коллимирующей системой и пентаприз- мой, а узел формирования параллак-
тического угла расположен между коллимирующей системой и двухклиновым компенсатором и выполнен в виде двух полулинз, установленных симметрично относительно оптической оси с возмож
ностью перемещения во взаимно протй мерения перемещения полулинз, элекч-
воположных направлениях и кинемати-рически связанных с первым приемо
чески связанных с введенным узлом из-.передатчиком,
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для топографической съемки местности | 1987 |
|
SU1504517A1 |
| Тахеометр | 1983 |
|
SU1165131A1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
| Способ определения пространственных координат объекта | 1985 |
|
SU1333004A1 |
| ШИРОКОДИАПАЗОННЫЙ КОМПАРАТОР ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ КООРДИНАТНЫХ СРЕДСТВ ИЗМЕРЕНИЙ | 2009 |
|
RU2401985C1 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ ВЕРТИКАЛЬНЫХ УГЛОВЫХ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ ГЕОДЕЗИЧЕСКИХ ПРИБОРОВ | 2006 |
|
RU2349877C2 |
| Угломерный маркшейдерский инструмент | 1947 |
|
SU84057A1 |
| Горный тахеометр | 1949 |
|
SU84843A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
Изобретение относится к области геодезического приборостроения и может быть использовано для выполнения наземной топографической съемки местности. Целью изобретения является повышение точности. Устройство содержит последовательно установленные на оптической оси лазер с коллимирующей системой 4, узел формирования параллактического угла, установленный с возможностью поворота на 90° вокруг оптической оси и выполненный в виде двух полулинз 12 и 14, расположенных симметрично относительно оптической оси, установленных с возможностью перемещения во взаимно противоположных направлениях, двухклиновый компенсатор 15, 16 и пентапризму 17, установленную с возможностью вращения вокруг оптической оси. А также устройство содержит угломерный блок 1 с визирным узлом 3, предназначенным для ориентирования начального отсчета угломерного блока 1 по направлению осевого меридиана, первый приемопередатчик 8, узел измерения перемещения полулинз, кинематически связанный с полулинзами 12 и 14 и электрически соединенный с первым приемопередатчиком 8, фотоэлектрическую рейку со вторым приемопередатчиком 8, фотоэлектрическую рейку со вторым приемопередатчиком и вычислительный блок. 2 ил.
га
11
Фиг. 2
| Авторское свидетельство СССР № 1238508, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для топографической съемки местности | 1987 |
|
SU1504517A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
