СП
С vl
СО О5
Изобретение относится к электроизмерительной технике и может быть использовано в устройствах контроля фазировки электрических машин.
Цель изобретения - расширение области использования за счет возможности контроля как во время враш,ения, так и без вращения ротора машины, и повышение достоверности результатов контроля.
На чертеже показана структурная схема устройства.
Устройство содержит датчики 1.1 -1.3, подключенные через блоки 2.1-2.3 умножения к входам формирователей 3.1-3.3 импульсов. Выход формирователя 3.1 импульсов через последовательно соединенные инвертор 4, элемент И 5 и инвертор 6 подсоединен к первому входу триггера 7.1, а первые входы триггеров 7.2 и 7.3 соединены с выходами формирователей 3.2 и 3.3 импульсов. Выходы триггеров 7.1-7.3 через элемент И 8 подключены к входам индикатора 9. Выход триггера 7.2 подключен через инвертор 10 к второму входу элемента И 5. Выход триггера 7.2 через последовательно соединенные элемент 11 задержки и инвертор 12 соединен с вторыми входами триггеров 7.1-7.3. Выходы блоков 2.1- 2.3 умножения через последовательно соединенные выпрямители 13..3 и фильтры 14.1-14.3 нижних частот (ФНЧ) подключены соответственно к входам миниселекто- ра 15 и максиселектора 16, а их выходы соединены соответственно с первым и вторым входами дифференциального усилителя 17, выход которого через пороговый элемент 18 подключен к индикатору 19. Выход максиселектора 16 через послед эватель- но соединенные дифференциальный усилитель 20 и интегратор 21 подсоединен к вторым входам блоков 2.1-2.3 умножения, а к второму входу дифференциального усилителя 20 подключен источник 22 опорного напряжения (ИОН). Кроме того, выход дифференциального усилителя 20 через пороговый элемент 23 соединен с четвертым входом элемента И 8.
Устройство работает следующим образом. Датчики 1.1 -1.3 устанавливаются или вблизи лобовых частей статорных обмоток, или на железе статора. Расстояние между датчиком должно учитывать число пар полюсов статорной обмотки и выбирается равным 120 эл. град. Датчики предназначены для измерения электромагнитного поля и могут быть использованы различного типа, например индукционные, состоящие из П-образного сердечника и обмотки.
К статорной обмотке подсоединяется источник переменного напряжения с промаркированными по фазе выводами. Величина напряжения выбирается меньше, чем необходимая для вращения ротора машины Датчики 1.1 - 1.3 также промаркированы по фазе.
0
С датчиков 1.1 - 1.3 поступают синусоидальные сигналы, сдвинутые друг относительно друга на 120 эл. град. После прохож- дения через блоки 2.1-2.3 умножения с по- мощью формирователей 3.1-3.3 импульсов создаются узкие импульсы при переходах синусоидальных сигналов через нулевые значения с отрицательного на положительный полупериод.
Логическая часть устройства определяет очередность фаз поступления импульсов ЛВС или ВАС. Возврат логической части схемы происходит после прохождения импульса по третьему каналу, т. е. через элементы с индексом 3. При прямом чередовании фаз 5 ABC первым появляется логический импульс «О на выходе формирователя 3.1 импульсов. В исходном состоянии на выходах триггеров 7.1-7.3 логические сигналы «О, поэтому после инвертора 10 на втором входе элемента И 5 сигнал «Ь. После инвертора 4 на первый вход элемента И 5 также поступает сиглал «1, следовательно, на выходе элемента 5 И появится сигнал «Ь, а после инвертора 6 сигнал преобразует- . ся в «О. Этот сигнал приводит к появ- 5 лению на выходе триггера 7.1 логической «Ь. При поступлении второго сигнала логического нуля с формирователя 3.2 импульса он переключает триггер 7.2 и на выходе инвертора 10 появляется сигнал «1. Но на выходе формирователя 3.1 импульса сигнала 30 нетг т. е. состояние логической «1, поэтому на первом входе логического элемента И 5 - сигнал «О. Следовательно, сигнал на выходе логического элемента И 5 останется «О. После прохождения трех сигналов ABC на выходах всех триггеров 7.1-7.3 бу- 35 дут сигналы «1.
При обратном чередовании фаз ВАС появляется логический сигнал «О на выходе формирователя 3.2 импульса, который переключает триггер 7.2 в состояние «1. Ло- .f. гический сигнал «О на выходе инверто- ра 10 блокирует появление логической «1 на выходе элемента И 5 во время срабатывания формирователя 3.1 импульсов, поэтому срабатывание триггера 7.1 не произойдет. После прохождения всех трех им- 45 пульсов ВАС на выходе триггера 7.1 останется сигнал «О, а на выходах триггеров 7.2 и 7.3 будут сигналы «Ь. Это сочетание сигналов свидетельствует об обратном направлении вращения магнитного поля статора по отнощению к маркировке 50 датчиков 1.1 - 1.3. Датчики 1.1 - 1.3 устанавливаются в последовательности требуемого направления вращения ротора. Для получения прямого чередования фаз изменяется подключение фаз источника питания А И Б к обмотке статора электрической ма55
щины.
Окончание контроля фазировки происходит после срабатывания триггера 7.3, с выхода которого с выдержкой элемента 11
задержки через инвертор 12 на вторые входы триггеров 7.1-7.3 поступит сигнал «О, переводя триггеры 7.1-7.3 в исходное состояние «О. Задержка по времени необходима для обеспечения срабатывания ин- дикатора 9.
Величины сигналов от датчиков 1.1 -1.3 зависят от конструкции и параметров электрических машин. С помощью блоков 2.1-2.3 умножения производится корректировка величины сигналов до значения опорного напряжения в ИОН 22.
Для этого после выпрямления в выпрямителях 13.1 - 13.3 выделяются постоянные составляющие в ФНЧ 14.1 - 14.3, которые поступают на максиселектор 16.
Максимальный из поданных на входы максиселектора 16 сигналов сравнивается в дифференциальном усилителе 20 с величиной опорного напряжения с ИОН 22. Этот сигнал через интегратор 21 поступает на вторые входы блоков 2.1-2.3 умножения. Значение сигнала на выходе интегратора 21 изменяется до тех пор, пока на его входе сигнал не примет нулевое значение, т. е. до равенства измеряемого и опорного сигналов.
Регулирование величин сигналов происходит на выходах блоков 2.1-2.3 умножения с задержкой, так как в цепи регулирования имеется интегратор 21, обладающий инерцией. После завершения процесса регулирования на выходе дифференциального усилителя 20 сигнал равен нулю, что вызывает возврат порогового элемента 23 в исходное состояние. На его выходе появляется сигнал логической «1, снимающий блокировку с элемента И 8.
Регулировка величин сигналов не обеспечивает равенство их во всех трех каналах. Значительные различия в величинах сигналов приводят к изменению фаз между ними, что может вызвать отказ в работе
llrirVlrl, TlVJ IVl 1DUl JOCl lU V lIV«-t J j-fU j i, -
устройства. Причиной отклонений величин ния, выходы которых соединены
.сигналов может быть неправильная установка датчиков 1.1.1.3, их отказ или неисправность в элементах устройства. Контроль разброса параметров на выходах блоков 2.1-2.3 умножения производится измерением разности между минимальным и максимальным значениями параметров. Разность между максимальным значением параметров на выходе максиселектора 16 и минимальный на . выходе миниселектора 15 измеряется с помощью дифференциального усилителя 17. Если на выходе последнего значение сигнала превысит величину срабатывания порогового элемента 18, то производится сигнализация индикатором 19 о неудовлетворительном состоянии измерительных каналов.
Таким образом, предлагаемое имеет большую область использования, так как может определять направление вращения ротора
35 второй дифференциальный усилител гратор, второй, третий и четвер верторы, второй индикатор, мини и максимальный селекторы и второй вый блок, причем выход интеграт динен с вторыми входами блоков ния, выходы которых соединены дами соответствующих трех формир импульсов, выход первого форми импульсов через последовательно с ные первый инвертор, первый эле второй инвертор и первый триггер со
первым входом второго элемента И которого соединен с входом второ катора, выходы второго и третьего рователей импульсов через соотве второй и третий триггеры соединен gQpbiM и третьим входами второго та И, четвертый вход которого через в торой пороговый блок с второго дифференциального усилит ход второго триггера через трети тор соединен с вторым входом 55 элемента И, выход третьего триг рез последовательно соединенные задержки и четвертый инвертор с вторыми входами трех триггеров
как во время его вращения, так и без вращения ротора. Использование устройства позволяет исключить необходимость кратковременного включения электрической машины под напряжение для определения направления вращения, что могло бы вызвать повреждение механизма. Это снижает аварийность оборудования. Кроме того, для мощных электрических машин изготовление специального ротора требует больших материальных и трудовых затрат. Использование датчиков позволяет применить единое устройство для различных типоразмеров электрических машин, что сокращает расходы, связанные с эксплуатацией устройства
фазировки.
20
Устройство обеспечивает повышенную достоверность результатов контроля, так как контролирует состояние датчиков, качество их установки и исправность.
Формула изобретения
-
0 ния, выходы которых соединены
Устройство для контроля фазировки электрических машин, содержащее три формирователя импульсов, три триггера, два элемента И, элемент задержки и первый инвертор, отличающееся тем, что, с целью расширения области использования и повышения достоверности результатов контроля, в него введены три последовательных це0 пи, состоящих из датчика, блока умножения, выпрямителя и фильтра нижних частот, последовательно соединенные первые дифференциальный усилитель, пороговый элемент- и индикатор, последовательно соединенные источник опорного напряжения,
5 второй дифференциальный усилитель и инте- гратор, второй, третий и четвертый инверторы, второй индикатор, минимальный и максимальный селекторы и второй пороговый блок, причем выход интегратора соединен с вторыми входами блоков умножения, выходы которых соединены с Bxoj дами соответствующих трех формирователей импульсов, выход первого формирователя импульсов через последовательно соединенные первый инвертор, первый элемент И, второй инвертор и первый триггер соединен с
первым входом второго элемента И, выход которого соединен с входом второго индикатора, выходы второго и третьего формирователей импульсов через соответственно второй и третий триггеры соединены с вто- gQpbiM и третьим входами второго элемента И, четвертый вход которого соединен через в торой пороговый блок с выходом второго дифференциального усилителя, выход второго триггера через третий инвертор соединен с вторым входом первого 55 элемента И, выход третьего триггера через последовательно соединенные элемент задержки и четвертый инвертор соединен с вторыми входами трех триггеров, выходы
трех фильтров нижних частот соединны свым входом первого дифференциального
соответствующими тремя входами минималь-усилителя, выход максимального селектораного и максимального селекторов, выходс вторыми входами первого и второго дифминимального селектора соединен с пер-ференциальных усилителей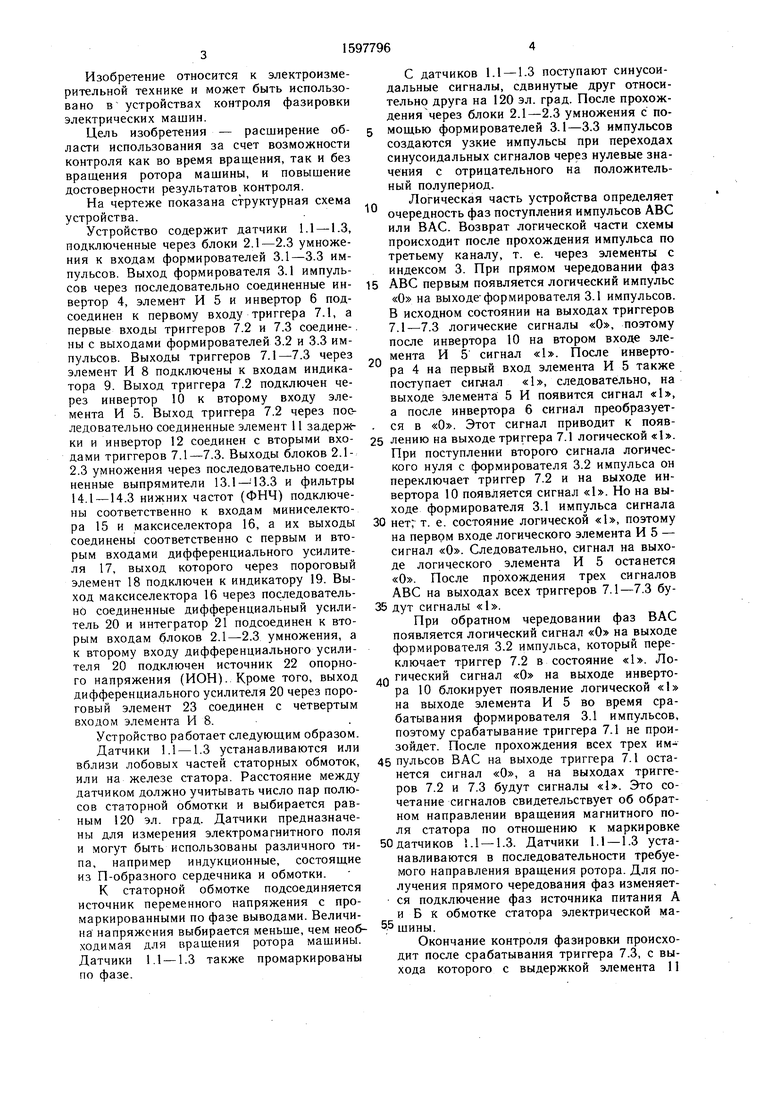
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления судном в штормовых условиях | 2023 |
|
RU2808705C1 |
| Устройство для определения места замыкания на высоковольтных линиях автоблокировки железных дорог | 1985 |
|
SU1339461A1 |
| Устройство приоритетного выбора непрерывного дискретизированного сигнала по принципу "большинства | 1984 |
|
SU1252937A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ДИСКРЕТНОГО КАНАЛА СВЯЗИ | 1995 |
|
RU2138910C1 |
| Устройство выбора непрерывного сигнала по принципу большинства | 1984 |
|
SU1193800A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕЗЕРВИРОВАНИЯ ИНФОРМАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2453079C2 |
| Устройство для контроля распределителя импульсов | 1987 |
|
SU1472908A1 |
| Автоматическая дистанционная система управления судовым дизелем | 1983 |
|
SU1125396A1 |
| Мажоритарный элемент | 1984 |
|
SU1213538A1 |
| Устройство для распределения импульсов | 1989 |
|
SU1615870A1 |
Изобретение относится к электроизмерительной технике и может быть использовано в устройствах контроля фазировки электрических машин. Цель изобретения - расширение области использования за счет возможности контроля как во время вращения, так и без вращения ротора машины и повышение достоверности результатов контроля - достигнута введением в устройство датчиков 1.1-1.3, блоков 2.1-2.3 умножения, инверторов 6.10, 12, выпрямителей 13.1-13.3, фильтров 14.1-14.3 нижних частот, мини- и максиселекторов 15, 16, дифференциальных усилителей 17, 20, индикаторов 9, 19, пороговых элементов 18, 23 интегратора 21 и источника 22 опорного напряжения. Возможность контроля фазировки электрических машин при неподвижном роторе позволяет избежать включения мощных электрических машин на время контроля. 1 ил.
| Авторское свидетельство СССР № 1160335, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство контроля последовательности чередования и наличия напряжения фаз в трехфазных сетях | 1985 |
|
SU1275329A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
