Изобретение относится к системам управления судами и в частности к системам управления курсом и режимами работы главного двигателя судна.
Известные системы автоматического управления движением судна (см., например, патент RU 2463205 C2, 2012 г.; (RU 2292289 C1, 27.01.2007)), состоят из приёмника спутниковой навигационной системы, датчика угловой скорости, блока заданного значения курсового угла и сумматора, в котором по сигналам текущего значения курсового угла, заданного значения курсового угла и угловой скорости судна формируется сигнал управления рулевым приводом судна. Известно «Устройство аварийного торможения судна с помощью руля», патент RU 2707480. Указанное устройство аварийного торможения судна с помощью руля состоит из блока управления курсом (БУК), блока навигации (БН), блока управления режимами работы главного двигателя (БУГД), блока аварийного управления рулем (БАУР), блока аварийного управления главным двигателем (БАУГД) и блока изменения курса и скорости (БИКС) судна.
Однако указанные аналоги имеют недостатки, заключающиеся в том, что они обеспечивают автоматическое управление судном на прямом курсе либо только при аварийном торможении судна. При управлении судном в штормовых условиях требуется высокая квалификации вахтенного штурмана, связанная с тем, что требуется по существующим номограммам определять скорость и курс судна в штормовых условиях, чтобы не войти в резонанс по крену судна, который может вызвать потерю равновесия судна и его опрокидывание. В настоящее время имеются технические средства, дающие возможность выработать управляющее воздействие на систему управления движением судна, с какой скоростью и каким курсом необходимо его вести, чтобы не войти в резонанс по крену.
Наиболее близким по технической сущности к заявленному устройству является «Устройство аварийного торможения судна с помощью руля и циркуляции», патент №2752101, состоящее из блока управления курсом (БУК), ϕ блока навигации (БН), блока управления режимами работы главного двигателя (БУГД), блока аварийного управления рулём (БАУР), блока аварийного управления главным двигателем (БАУГД) и блока изменения курса и скорости (БИКС) судна. Первый, второй, третий, четвёртый входы БАУР соединены, соответственно, с девятым выходом БАУГД, первым и третьим, вторым, двенадцатым выходами БИКС, пятый, шестой, седьмой, восьмой, девятый выходы БАУР соединены, соответственно, с одиннадцатым, десятым входами БИКС, первым, вторым входами БУК, первым входом БУГД, а девятый, восьмой, седьмой входы БИКС и третий вход БУК соединены, соответственно, с первым, вторым выходами БН, седьмым выходом БАУГД, первым выходом БН. Кроме того, первый, второй, третий, четвёртый, пятый, шестой, тринадцатый выходы БИКС соединены, соответственно, с первым, вторым, третьим, четвёртым и одиннадцатым, пятым, шестым, десятым входом БАУГД и третьим входом БУГД. Девятый и восьмой выходы БАУГД соединены, соответственно, с четырнадцатым входом БИКС и вторым входом БУГД.
Недостатком ближайшего аналога является отсутствие возможности в штормовых условиях автоматического изменения скорости судна и курсового угла к направлению распространения волн, исключающими возникновение резонанса по крену судна и его опрокидыванию.
Техническим результатом от применения заявленного устройства является повышение безопасности управления судном в штормовых условиях за счёт автоматического вычисления необходимой скорости и курсового угла к направлению распространения волн судна, исключающими возникновение резонанса по крену судна и его опрокидыванию.
Для достижения указанного технического результата предлагаемое устройство, также, как известное устройство управления аварийного торможения судна с помощью руля и циркуляции, содержит блок управления курсом БУК, блок управления главным двигателем БУГД и блок навигации БН, однако вместо блока аварийного управления рулём БАУР, блока аварийного управления главным двигателе БАУГД, блока изменения курса и скорости БИКС, введены блок вычисления периода собственной качки судна БВПСКС, блок вычисления до резонансной и после резонансной скоростей судна БВДПСС и блок вычисления курса судна в штормовых условиях БВКСШ, при этом первый выход T0 блока БВПСКС соединён с третьим входом блока БВДПСС и вторым входом блока БВКСШ, четвёртый вход которого также соединён с первым выходом T0 блока навигации БН и первым входом блока БВДПСС, второй вход которого соединён со вторым выходом ϕс блока навигации, третий выход которого по курсу судна ϕ соединён с первым входом блока управления курсом БУК, второй вход которого ϕсз с пятым выходом блока БВКСШ, а пятый VC(0,7) и четвёртый VC(1,3) выходы выход блока БВДПСС соединены с первым и вторым входами блока БВССШ, четвёртый, пятый и шестой выходы которого соответственно соединены с первым, третьим и вторым входами блока БУГД, а шестой выход, кроме того, соединён с третьим входом VC(0,7) блока БВКСШ, а третий вход блока БВССШ соединён с четвёртым выходом блока БУГД и первым входом блока БВКСШ.
Также технический результат достигается за счёт того, что блок вычисления периода собственной качки судна БВПСКС, состоит из клавиатуры ввода исходных данных КВИД, модуля вычисления изменения метацентрической высоты Δh МВИМВ и модуля вычисления периода собственной качки судна Т0 МВПСКС, при этом выходы клавиатуры ввода исходных данных КВИД первый по осадке до начала грузовых операций d, второй по массе принятого груза m, третий по ширине судна В, четвёртый по водоизмещению порожнего судна D, пятый по числу тонн на 1 см осадки q, шестой по расстоянию между центром тяжести и килём порожнего судна ZP соединены соответственно с первым, вторым, третьим, четвёртым, пятым и шестым входами модуля МВИМВ, выход которого Δh которого соединён с первым входом модуля МВПСКС, второй вход которого соединён с седьмым выходом по метацентрической высоте порожнего судна h0 , а выход модуля МВПСКС соединен с первым выходом блока БВПСКС.
Также технический результат достигается за счёт того, что блок вычисления до резонансной и после резонансной скорости судна БВДПСС состоит из модуля вычисления до резонансной скорости судна VC (0,7) МВДСС и модуля вычисления после резонансной скорости судна VC(1,3) МВПСС, при этом первый вход периода волнения моря ТВ, второй вход курсового судна к волне ϕС и третий вход периода собственной качки судна Т0 соединены соответственно с первым, вторым и третьим входами модуля МВДСС и со вторым, с третьим и первым входами модуля МВПСС, а первый выход модуля МВДСС, а выходы модулей МВДСС и МВПСС соединены соответственно с пятым и четвёртым выходами блока БВДПСС.
Также технический результат достигается за счёт того, что блок выработки скорости судна в штормовых условиях БВССШ состоит из первого, второго и третьего триггеров, первого и второго инверторов НЕ, первого и второго логических элементов И, логического элемента ИЛИ и кнопки Кн Стоп, при этом выход кнопки Кн Стоп соединён с седьмым выходом блока БВССШ и входами R первого, второго и третьего триггеров, входы S которых соответственно соединены с первым, вторым и третьим входами БВССШС, выход третьего триггера соединён через первый инвертор с первым входом первого логического элемента И, выход которого соединён с четвёртым выходом блока БВССШ, с первым входом логического элемента ИЛИ и через второй инвертор НЕ соединён с первым входом второго логического элемента И, а вторые входы первого и второго логических элементов И соединены соответственно с выходами первого и второго триггеров, при этом выход второго логического элемента И соединён с шестым выходом блока БВССШ и через второй вход логического элемента ИЛИ соединён с пятым выходом блока БВССШ.
Также технический результат достигается за счёт того, что блок управления главным двигателем БУГД, состоит из элемента ИЛИ, инвертора НЕ, логического элемента И, задатчика режимов работы главного двигателя ЗГД, элемента сравнения ЭС, усилителя У, исполнительного механизма ИМ, сектора газа СГ, датчика обратной связи ДОС, и сигнализатора перегрузки главного двигателя С, при этом первый вход блока БУГД (5) соединён с первым входом элемента ИЛИ, второй вход элемента ИЛИ является третьим входом блока БУГД, а выход элемента ИЛИ соединён, через инвертор НЕ с первым входом логического элемента И, второй вход которого соединён с задатчиком ЗГД, а выход логического элемента И соединён с первым входом элемента сравнения ЭС, второй и третий входы которого являются, соответственно, вторым входом блока БУГД и выходом датчика обратной связи ДОС, выход же элемента ЭС соединён через усилитель У с исполнительным механизмом ИМ, механически связанным с сектором газа СГ и датчиком обратной связи ДОС, а выход сигнализатора С соединён с четвёртым выходом блока БУГД.
Также технический результат достигается за счёт того, что блок вычисления курса судна в штормовых условиях БВКСШ состоит из логического элемента И, триггера и модуля вычисления курса судна в штормовых условиях МВКСШ, при этом первый и второй входы логического элемента И являются соответственно первым и третьим входами блока БВКСШ, а выход логического элемента И соединён с входом S триггера, вход R которого является шестым входом блока БВКСШ (7), а выход триггера соединён со вторым входом модуля МВКСШ, входы 1, 3, 4 которого являются соответственно вторым, четвёртым и седьмым входом блока БВКСМШ, выход же модуля МВКСШ является пятым выходом блока БВКСМШ.
Также технический результат достигается за счёт того, что в блоке навигации БН, имеющем выходные связи для передачи сигналов по курсу ϕ и скорости V судна, введены выходные связи по передаче сигналов по периоду волнения TB и и курсовому углу судна ϕС по отношению к направлению бега волн, а также введена входная связь в блок управления курсом БУК судна по курсовому углу судна ϕСШ в штормовых условиях.
Заявленное устройство поясняется чертежами:
фиг.1 - устройство управления судном в штормовых условиях (УУСШУ);
фиг.2 - блок вычисления периода собственной качки судна БВПСКС (1);
фиг.3 - блок вычисления до резонансной и после резонансной скоростей судна БВДПСС (2);
фиг.4 - блок выбора скорости судна в штормовых условиях БВССШ (3);
фиг.5 - блок управления курсом БУК (4);
фиг.6 - блок управления главным двигателем БУГД (5);
фиг.7 - блок навигации БН (6);
фиг.8 - блок вычисления курса судна в штормовых условиях (БВКСШ);
Предлагаемое устройство содержит блоки вычисления периода собственной качки судна БВПСКС 1, вычисления до резонансной и после резонансной скорости судна БВДПСС 2, выработки скорости судна в штормовых условиях БВССШ 3, управления курсом БУК 4, управления главным двигателем БУГД 5, навигации БН 6 и вычисления курса судна в штормовых условиях БВКСШ 7.
Первый выход блока БВПСКС 1 соединён с третьим входом блока БВДПСС 2 и вторым входом блока БВКСШ 7.
Первый вход блока БВДПСС 2 соединён с первым выходом периода штормового волнения моря ТВ блока БН 6 и с четвёртым входом блока БВКСШ 7, а второй вход курса судна по отношению к направлению распространения штормового волнения моря ϕС блока БВДПСС 2 соединён со вторым выходом блока БН 6. Пятый и четвёртый выходы блока БВДПСС 2 соединены соответственно с первым и со вторым входом блока БВССШ 3.
Четвёртый, пятый и шестой выходы блока БВССШ 3 соединены соответственно с первым, вторым и третьим входами блока БУГД 5. Шестой выход БВССШ 3, кроме того, соединён с третьим входом блока БВКСШ 7. Третий вход блока БВССШ 3 соединён с четвёртым выходом блока БУГД 5 и с первым входом блока БВКСШ 7. Пятый выход ϕС1 блока БВКСШ 7 соединён со вторым входом блока БУК 4, первый вход которого соединён с третьим выходом ϕ блока БН 6.
БВПСКС 1, фиг.2, предназначен для определения периода собственных колебаний судна перед выходом в море и состоит из клавиатуры ввода исходных данных КВИД 1.1, модуля вычисления изменения метацентрической высоты Δh МВИМВ 1.2 и модуля вычисления периода собственной качки судна Т0 МВПСКС 1.3.
Выходы модуля КВИД 1.1 первый по осадке до начала грузовых операций d, второй по массе принятого груза m, третий по ширине судна В, четвёртый по водоизмещению порожнего судна D, пятый по числу тонн на 1 см осадки q, шестой по расстоянию между центром тяжести и килём порожнего судна ZP соединены соответственно с первым, вторым, третьим, четвёртым, пятым и шестым, входами модуля МВВИМВ 1.2, седьмой выход которого Δh которого соединён с первым входом модуля МВПСКС 1.3, второй вход которого соединён соответственно с седьмым выходом по метацентрической высоте порожнего судна h0 модуля КВИД, а третий выход модуля МВПСКС 1.3 соединен с первым выходом БВПСКС 1.
БВДПСС 2, фиг.3, предназначен для вычисления до резонансной и после резонансной скорости судна и состоит из модуля вычисления до резонансной скорости судна VC (0,7) МВДСС 2.1 и модуля вычисления после резонансной скорости VC(1,3) МВПСС 2.2.
Первый вход периода волнения моря ТВ, второй вход курсового угла судна к волне ϕС и третий вход периода собственной качки судна Т0 (2.3) блока БВДПСС соединены соответственно с первым, вторым и третьим входами модуля МВПСС 2.2 и соответственно со вторым, третьим и первым входами модуля МВПСС 2.2, а четвёртые выходы блоков МВДСС 2.1 и МВПСС 2.2 соединены соответственно с выходами 2.5 и 2.4 блока БВДПСС (2).
БВССШ (3), фиг.4, предназначен для выбора скорости в штормовых условиях и состоит из первого 3.1, второго 3.2 и третьего триггеров 3.3, первого 3.4 и второго 3.5 инверторов НЕ, первого 3.6 и второго 3.7 логических элементов И, логического элемента ИЛИ 3.8 и кнопки Кн Стоп 3.9.
Выход кнопки Кн Стоп 3.9 соединён с седьмым выходом блока БВССШ 3 и входами R первого 3.1 и второго3.2 триггеров, входы S которых соответственно соединены с первым 3.1, вторым 3.2 входами и третьим 3.3 входами блока БВССШ (3).
Выход третьего триггера 3.3 соединён через первый инвертор 3.4 с первым входом первого логического элемента И 3.6, а выходы первого 3.1 и второго 3.2 триггеров соединены со вторыми входами первого 3.6 и второго 3.7 логических элементов И.
Выход первого логического элемента И 3.6 соединён с выходом 3.4 блока БВССШ 3, с первым входом второго логического элемента ИЛИ 3.8) и через второй инвертор НЕ 3.5 соединён с первым входом второго логического элемента И 3.7) выход которого соединён с выходом 3.6 блока БВССШ 3 и через второй вход логического элемента ИЛИ 3.8 с выходом 3.5 блока БВССШ 3 .
БУК (4), фиг.5, предназначен для управления судно по курсу по сигналам блока БН 6 и блока БВКСШ 7 и содержит входы 4.1 ϕ и 4.2 ϕСШ.
БУГД (5), фиг. 6, предназначен для установки режима работы главного двигателя от задатчика ЗГД 5.4 или от блока БВССШ 3, фиг.4, и состоит из логического элемента ИЛИ 5.1, инвертора НЕ 5.2, логического элемента И 5.3, задатчика ЗГД 5.4, элемента сравнения ЭС 5.5, усилителя У 5.6, исполнительного механизма ИМ 5.7, сектора газа СГ 5.8, датчика обратной связи ДОС и 5.9, и сигнализатора перегрузки главного двигателя С 5.10.
Первый вход 5.1 БУГД 5 соединён с первым входом элемента ИЛИ 5.1, второй вход элемента ИЛИ 5.1 является третьим входом 5.3 блока БУГД 5, а выход элемента ИЛИ 5.1 соединён, через инвертор НЕ 5.2, с первым входом логического элемента И 5.3.
Второй вход логического элемента И 5.3 соединён с ЗГД 5.4, а выход логического элемента И 5.3 соединён с первым входом ЭС 5.5, второй и третий входы которого являются, соответственно, вторым входом 5.2 блока БУГД 5 и выходом ДОС 5.9.
Выход ЭС 5.5 соединён через усилитель У 5.6 с ИМ 5.7, механически связанным с СГ 5.8 и ДОС 5.9. Выход сигнализатора С 5.10 соединён с выходом 5.4 блока БУГД (5).
БН (6), фиг.7, предназначен для выработки сигнала по курсу судна ϕ, по периоду штормового волнения моря ТВ и курсовому углу судна по отношению к направлению распространения волнения моря ϕС и содержит выходы ТВ 6.1, ϕС 6.2 и φ 6.3.
БВКСШ (7), фиг.8, предназначен для вычисления курса судна в штормовых условиях и состоит из логического элемента И 7.1, триггера 7.2 и модуля вычисления курса судна в штормовых условиях МВКСШ 7.
Первый и второй входы логического элемента И 7.1 являются соответственно первым 7.1 и третьим 7.3 входами блока БВКСМШ 7, а выход логического элемента И 7.1 соединён с входом S триггера 7.2, вход R которого является шестым входом 7.6 блока БВКСМШ 7.
Выход триггера 7.2 соединён со вторым входом модуля МВКСШ (7.3), первый, третий и четвёртый входы которого соответственно являются вторым 7.2, четвёртым 7.4 и седьмым 7.7 входами блока БВКСМШ 7, а выход модуля МВКСШ 7.3 является пятым выходом 7.5 блока БВКСМШ 7.
Устройство управления судном в штормовых условиях УУСШУ, фиг.1, работает следующим образом. В исходном положении перед выходом судна в море после завершения погрузочных операций в блоке БВПСКС 1, фиг.2, с помощью клавиатуры КВИД 1.1 вводится информация с первого выхода 1 по осадке до начала грузовых операций d, со второго выхода 2 по массе принятого груза m, с третьего выхода 3 по ширине судна В, с четвёртого выхода 4 по водоизмещению порожнего судна D, с пятого выхода 5 по числу тонн на 1 см осадки q, с шестого выхода 6 по расстоянию между центром тяжести и килём порожнего судна ZP , на первый 1, второй 2, третий 3, четвёртый 4, пятый 5 и шестой 6 входы модуля МВИМВ 1.2 фиг.2 На основании поступивших данных в модуле МВИМВ 1.2 вычисляется Δh - изменение метацентрической высоты судна после выполнения операции погрузки, в м, по формуле:
 .
.
Вычисленная величина Δh поступает из модуля МВИМВ 1.2 на первый вход 1 модуля МВПСКС 1.3, а на второй 2 поступает информация с выхода 7 КВИД 1.1 по начальной метацентрической высоте порожнего судна h0. На основании поступившей информации по Δh и h0 в модуле МВПСКС 1.3 вычисляется метацентрическая высот судна h после погрузки перед выходом в море в м: h = h0 + Δh и период собственных колебаний судна до выхода в море по формуле:  . Вычисленная величина Т0 с третьего выхода 3 модуля МВПСКС 1.3 поступает на выход 1.1 БВПСКС 1, а с него поступает на третий вход 2.3 блока БВДПСС 2, фиг.3, на первый 2.1 и второй 2.2 входы которого поступают соответственно данные с выходов 6.1 и 6.2 блока навигации БН 6, фиг.7, о периоде волнения моря ТВ и курсовом угле встречи судна с направлением распространения волнением моря ϕС.
. Вычисленная величина Т0 с третьего выхода 3 модуля МВПСКС 1.3 поступает на выход 1.1 БВПСКС 1, а с него поступает на третий вход 2.3 блока БВДПСС 2, фиг.3, на первый 2.1 и второй 2.2 входы которого поступают соответственно данные с выходов 6.1 и 6.2 блока навигации БН 6, фиг.7, о периоде волнения моря ТВ и курсовом угле встречи судна с направлением распространения волнением моря ϕС.
Когда судно движется в штормовых условиях заданным заранее курсом работает блок управления курсом БУК 4, получая информацию по курсу судна (ϕ) на вход 4.1 БУК 4 от выхода 6.3 блока навигации БН 6, фиг.7, и обеспечивает стабилизацию курса судна. Блок управления главным двигателем БУГД 5, фиг.6, обеспечивает заданный режим работы главного двигателя от задатчика ЗГД (5.4), так как элемент И 5.3 открыт, ввиду того, что на входе 5.1 блока БУГД 5, фиг.6, сигнал равен нулю, поэтому на выходе инвертора НЕ 5.2 реализуется сигнал управления. Этот сигнал поступает на первый вход логического элемента И 5.3, обеспечивая его открытие. В силу этого сигнал от задатчика ЗГД 5.4 поступает на первый вход 1 элемента сравнения ЭС 5.5, обеспечивая поддержание заданного режима работы главного двигателя следящей системой, состоящей из элемента сравнения ЭС 5.5, усилителя У 5.6, исполнительного механизма ИМ 5.7, сектора газа СГ 5.8 и датчика обратной связи ДОС 5.9.
На основании данных по ТВ, ϕС, Т0, поступивших соответственно на первый 2.1, второй 2.2, третий 2.3 входы блока БВДПСС 2, фиг.3, в модуле МВДСС 2.1 вычисляется граница скорости до резонансной зоны VC(0,7) при курсовом угле судна ϕС по формулам
 ,
,  , м/с,
, м/с,
а в модуле МВДСС 2.2 вычисляется граница скорости после резонансной зоны VC(1,3) при курсовом угле судна ϕС по формулам:
 ,
,  , м/с.
, м/с.
Данные по границе скорости VC(0,7) c модуля МВДСС 2.1 поступают на пятый выход 2.5 блока БВДПСС 2, фиг.3, а данные по границе скорости VC(1,3) с модуля МВПСС 2.2 поступают на четвёртый выход 2.4 блока БВДПСС (2), фиг.3. Сигнал по скорости VC(1,3) с четвёртого выхода 2.4 БВДПСС 2, фиг.3, поступает на первый вход 3.1 блока БВССШ 3, фиг4, а сигнал скорости VC(0,7) с пятого выхода блока БВДПСС 2, фиг.3, поступает на второй вход 3.2 блока БВССШ 3, фиг.4.
Если на третьем входе 3.3 блока БВССШ 3, фиг.4, сигнал с выхода 5.4 блока БУГД 5, фиг.6, от сигнализатора С 5.10 отсутствует, тогда третий триггер 3.3 блока БВССШ 3 будет выключен, и на выходе первого инвертора НЕ 3.4 блока БВССШ 3 появляется сигнал управления, который поступает на первый вход первого логического элемента И 3.6 блока БВССШ 3, фиг.4, и подготавливает его к открытию.
Сигналы с первого входа 3.1 и со второго входа 3.2 БВССШ 3, фиг.4, соответственно по скоростям VC(1,3) VC(0,7) поступают на входы S первого 3.1 и второго 3.2 триггеров блока БВССШ 3, фиг.4, и включают их. В результате сигналы по скоростям VC(1,3) VC(0,7) поступают на вторые входы соответственно первого 3.6 и второго 3.7 логических элементов И блока БВССШ 3. Первый логический элемент И 3.6 включается и через второй инвертор НЕ 3.5 и первый вход второго логического элемента И 3.7 запирает его. В результате на выходе второго логического элемента И 3.7 блока БВССШ 3 сигнал по скорости VC(0,7) отсутствует.
Сигал по скорости судна VC(1,3) с выхода первого логического элемента И 3.6 блока БВССШ 3, фиг.4, поступает на четвёртый выход 3.4 блока БВССШ 3 и через первый вход логического элемента ИЛИ 3.8 поступает на выход 3.5 БВССШ 3.
Сигнал управления с выхода 3.4 блока БВССШ 3 поступает через вход 5.1 блока БУГД (5), фиг.6, на первый вход логического элемента ИЛИ 5.1, а с выхода его через инвертор НЕ 5.2 поступает на первый вход логического элемента И 5.3 блока БУГД 5 и запирает его, прекращая доступ сигнала управления от задатчика ЗГД 5.4 на первый вход элемента сравнения ЭС 5.5.
Сигнал управления по скорости VC(1,3) с выхода 3.5 блока БВССШ 3, фиг.4, поступает на вход 5.2 БУГД 5, фиг.6, и далее на второй вход ЭС 5.5, устанавливая тем самым через следящую схему У 5.6, ИМ 5.7, СГ 5.8, ДОС 5.9 и третий вход ЭС 5.5 БУГД 5 режим работы главного двигателя, соответствующий скорости VC(1,3).
Судно развивает данную скорость и, если не срабатывает сигнализатор перегрузки С 5.10 блока БУГД (5), фиг.6, судно продолжает идти в штормовых условиях на скорости VC(1,3) и с заданным курсовым углом ϕС.
Если при движении заданным курсовым углом ϕС и скорости VC(1,3), штормовые условия такие, что срабатывает сигнализатор С 5.10 блока БУГД 5, фиг.6, сигнализируя о перегрузке главного двигателя, тогда сигнал управления с выхода 5.4 блока БУГД 5 поступает на вход 3.3 блока БВССШ 3, фиг.4, и на первый вход 7.1 БВКСШ 7, фиг.8. С входа 3.3 блока БВССШ 3, фиг.4, сигнал поступает на вход S третьего триггера 3.3 и включает его. Логический элемент И 7.1, блок БВКСШ (7), фиг.8, остаётся закрытым, так как на втором входе логического элемента И (7.1) сигнала управления нет, в виду отсутствия его на выходе 3.6 блока БВССШ 3, фиг.4.
Сигнал управления с выхода третьего триггера 3.3 блока БВССШ 3, фиг.4, через первый элемент НЕ 3.4 поступает на первый вход первого логического элемента И 3.6 и запирает его. В результате этого на выходе второго инвертора НЕ 3.5 появляется сигнал, который открывает второй логический элемент И 3.7 блока БВССШ 3, пропуская сигнал по скорости VC(0,7) на выход 3.6 блока БВССШ 3, фиг.4, и через второй вход логического элемента ИЛИ 3.8 поступает сигнал на выход 3.5 блока БВССШ 3.
Сигнал с шестого выхода 3.6 БВССШ 3, фиг.4, поступает через вход 5.3 БУГД 5, фиг.6, и далее через вход логического элемента ИЛИ 5.1, инвертор НЕ 5.2 продолжает удерживать логический элемент И 5.3 блока БУГД 5 в закрытом состоянии, не пропуская сигнал управления от задатчика ЗГД 5.4 на первый вход ЭС 5.5 БУГД 5. Сигнал с выхода 3.6 блока БВССШ 3, фиг.4, поступает также на вход 7.3 блока БВКСШ 7, фиг.8, и поступает на второй вход логического элеиента И 7.1, подготавливая его к работе.
Сигнал с пятого выхода 3.5 блока БВССШ 3, фиг.4, по скорости VC(0,7) поступает через вход 5.2 блока БУГД 5, фиг.6, на второй вход ЭС 5.5 БУГД 5 и через следящую систему, состоящую из У 5.6. ИМ 5.7, СГ 5.8, ДОС 5.9 устанавливает режим работы главного двигателя, соответствующий скорости VC(0,7). Если не срабатывает сигнализатор по перегрузке главного двигателя С 5.10 блока БУГД 5 то судно движется в штормовых условиях с курсовым углом ϕС и скоростью VC(0,7).
Если и в этих условиях срабатывает сигнализатор перегрузки главного двигателя С 5.10, фиг.6, т.е. судно не может идти по перегрузке двигателя со скоростью VC(0,7) и заданным курсовым углом ϕС, тогда сигнал с выхода 5.4 блока БУГД 5, фиг.6, поступает на первый вход 7.1 блока БВКСШ 7, фиг.8, далее на первый вход логического элемента И 7.1, открывая его, так как на втором входе логического элемента И 7.1 присутствует сигнал от входа 7.3. В результате сигнал управления с выхода логического элемента И 7.1 блока БВКСШ 7 поступает на вход S триггера 7.2 и включает его. Сигнал с выхода триггера 7.2 поступает на второй вход 2 модуля МВКСШ 7.3, фиг.8, на первый вход 1 которого поступает сигналы Т0, соединённого с выходом 1.1 блока БВПСКС 1, фиг.2, на третий вход поступает сигнал ТВ от входа (7.4), соединённого с выходом (6.1) блока БН 6, фиг.7, и на четвёртый вход поступает сигнал ϕС со входа 7.7, соединённого с выходом 6.2 блока БН 6) фиг.7.
Модуль МВКСШ 7.3, фиг.8, вычисляет до резонансный курсовой угол ϕС1, обеспечивающий движение судна с до резонансной скоростью VC(0,7) и исключающий возможность возникновения резонансной качки по крену по формуле:
 , градусы.
, градусы.
Рассчитанный курсовой угол ϕС1 поступает на пятый выход 7.5, фиг.8, который соединён со вторым входом 4.2 блока БУК 4, фиг.5. В результате блок БУК 4 устанавливает курс судна ϕС1, отличный от первоначального, но обеспечивающий движение судна без перегрузки главного двигателя и исключающий возможность возникновения резонансной качки по крену.
Для приведения схемы в исходное состояние необходимо в блоке БВССШ 3, фиг.4, нажать Кн Стоп 3.9. Сигнал управления от Кн Стоп 3.9 поступит на входы R первого 3.1 , второго 3.2 и третьего триггеров блока БВССШ 3 и приводит их в исходное состояние. Кроме того, сигнал с выхода 3.7 БВССШ 4 поступает на шестой вход 7.6 БВКСШ 7, фиг.8, соединённого также с входом R триггера 7.2, и устанавливает его также в исходное состояние.
В качестве составных частей устройства использовались электронные элементы, описанные в работах: К.Ф. Ибрагим. Основы электронной техники, Москва, Мир, 1997; Ю.К. Выдренков. Системотехника, Военно-Морской инженерный институт, СПб, 2004; Пороговые устройства на элементах цифровой логики, электронный ресурс nauchebe.net›2012/09/porogovye-ustrojstva…logiki/; А.В. Лукутин, Е.Б. Шандарова. Элементы электроники. Издательство Томского политехнического университета, 2012.
Подтверждение возможности достижения указанного технического результата при использовании заявленного устройства было осуществлено в ходе испытаний лабораторного макета, выполненного на логических и программируемых элементах электронной техники, совместно с моделью блока управления курсом судна, моделью блока навигации и моделью продольного и бокового движения судна, реализованными на персональном компьютере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство аварийного торможения судна | 2022 |
|
RU2782325C1 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ СУДНА С ПОМОЩЬЮ РУЛЯ | 2018 |
|
RU2707480C1 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ СУДНА С ПОМОЩЬЮ РУЛЯ И ЦИРКУЛЯЦИИ | 2020 |
|
RU2752101C1 |
| СПОСОБ КОНТРОЛЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ШТОРМОВОГО ПЛАВАНИЯ СУДНА | 2023 |
|
RU2813122C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| Способ контроля процесса эвакуации экипажа и пассажиров при возникновении морских катастроф | 2017 |
|
RU2658232C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| МОРСКОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ТРЕНАЖЕР | 2003 |
|
RU2251157C2 |
Устройство управления судном в штормовых условиях содержит блок вычисления периода собственной качки судна (БВПСКС), блок вычисления до резонансной и после резонансной скоростей судна (БВДПСС), блок выработки скорости судна в штормовых условиях (БВССШ), блок управления курсом (БУК), блок управления главным двигателем (БУГД), блок навигации (БН) и блок вычисления курса судна в штормовых условиях (БВКСШ), соединенные определенным образом. Обеспечивается повышение безопасности управления судном в штормовых условиях. 5 з.п. ф-лы, 8 ил.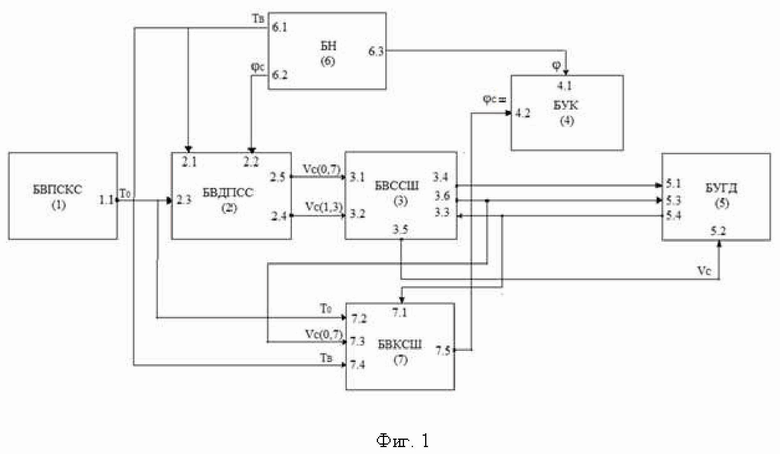
1. Устройство управления судном в штормовых условиях (УУСШУ), содержащее блок управления курсом (БУК), блок управления главным двигателем (БУГД) и блок навигации (БН), отличающееся тем, что в структуру устройства введены блок вычисления периода собственной качки судна (БВПСКС), блок вычисления до резонансной и после резонансной скоростей судна (БВДПСС), блок вычисления курса судна в штормовых условиях (БВКСШ) и клавиатура ввода исходных данных (КВИД), при этом первый выход T0 блока вычисления периода собственной качки судна БВПСКС соединён с третьим входом блока вычисления до резонансной и после резонансной скоростей судна БВДПСС и вторым входом блока вычисления курса судна в штормовых условиях БВКСШ, четвёртый вход которого также соединён с первым выходом T0 блока навигации БН и первым входом блока вычисления до резонансной и после резонансной скоростей судна БВДПСС, второй вход которого соединён со вторым выходом ϕс блока навигации, третий выход которого по курсу судна ϕ соединён с первым входом блока управления курсом БУК, второй вход которого ϕсз с пятым выходом блока вычисления курса судна в штормовых условиях БВКСШ, а пятый VC (0,7) и четвёртый VC (1,3) выходы блока вычисления до резонансной и после резонансной скоростей БВДПСС соединены с первым и вторым входами блока выбора скорости судна в штормовых условиях БВССШ, четвёртый, пятый и шестой выходы которого соответственно соединены с первым, третьим и вторым входами блока управления главным двигателем БУГД, а шестой выход, кроме того, соединён с третьим входом VC (0,7) блока вычисления курса судна в штормовых условиях БВКСШ, а третий вход блока выбора скорости судна в штормовых условиях БВССШ соединён с четвёртым выходом блока управления главным двигателем БУГД и первым входом блока вычисления курса судна в штормовых условиях БВКСШ.
2. Устройство управления судном по п.1, отличающееся тем, что блок вычисления периода собственной качки судна БВПСКС состоит из клавиатуры ввода исходных данных КВИД, модуля вычисления изменения метацентрической высоты ∆h МВИМВ и модуля вычисления периода собственной качки судна Т0 МВПСКС, при этом выходы клавиатуры ввода исходных данных КВИД первый по осадке до начала грузовых операций d, второй по массе принятого груза m, третий по ширине судна В, четвёртый по водоизмещению порожнего судна D, пятый по числу тонн на 1 см осадки q, шестой по расстоянию между центром тяжести и килем порожнего судна ZР соединены соответственно с первым, вторым, третьим, четвёртым, пятым и шестым входами модуля вычисления изменения метацентрической высоты ∆h МВИМВ, выход ∆h которого соединён с первым входом модуля вычисления периода собственной качки судна МВПСКС, второй вход которого соединён с седьмым выходом по метацентрической высоте порожнего судна h0 , а выход модуля вычисления периода собственной качки судна МВПСКС соединен с первым выходом блока вычисления периода собственной качки судна БВПСКС.
3. Устройство управления судном по п.1, отличающееся тем, что блок вычисления до резонансной и после резонансной скоростей судна БВДПСС состоит из модуля вычисления до резонансной скорости судна VC (0,7) МВДСС и модуля вычисления после резонансной скорости судна VC (1,3) МВПСС, при этом первый вход периода волнения моря ТВ, второй вход курсового судна к волне ϕС и третий вход периода собственной качки судна Т0 соединены соответственно с первым, вторым и третьим входами модуля вычисления до резонансной скорости судна МВДСС и со вторым, с третьим и первым входами модуля вычисления после резонансной скорости судна МВПСС, а выходы модулей вычисления до резонансной скорости судна МВДСС и после резонансной скорости МВПСС соединены соответственно с пятым и четвёртым выходами блока вычисления до резонансной и после резонансной скоростей судна БВДПСС.
4. Устройство управления судном по п.1, отличающееся тем, что блок выработки скорости судна в штормовых условиях БВССШ состоит из первого, второго и третьего триггеров, первого и второго инверторов НЕ, первого и второго логических элементов И, логического элемента ИЛИ и кнопки Кн Стоп, при этом выход кнопки Кн Стоп соединён с седьмым выходом блока выработки скорости судна в штормовых условиях БВССШ и входами R первого, второго и третьего триггеров, входы S которых соответственно соединены с первым, вторым и третьим входами блока выработки скорости судна в штормовых условиях БВССШС, выход третьего триггера соединён через первый инвертор с первым входом первого логического элемента И, выход которого соединён с четвёртым выходом блока выработки скорости в штормовых условиях БВССШ, с первым входом логического элемента ИЛИ и через второй инвертор НЕ соединён с первым входом второго логического элемента И, а вторые входы первого и второго логических элементов И соединены соответственно с выходами первого и второго триггеров, при этом выход второго логического элемента И соединён с шестым выходом блока выработки скорости судна в штормовых условиях БВССШ и через второй вход логического элемента ИЛИ соединён с пятым выходом блока выработки скорости судна в штормовых условиях БВССШ.
5. Устройство управления судном по п.1, отличающееся тем, что блок управления главным двигателем БУГД состоит из элемента ИЛИ, инвертора НЕ, логического элемента И, задатчика работы режимов главного двигателя ЗГД, элемента сравнения ЭС, усилителя У, исполнительного механизма ИМ, сектора газа СГ, датчика обратной связи ДОС и сигнализатора перегрузки главного двигателя С, при этом первый вход блока управления главным двигателем БУГД соединён с первым входом элемента ИЛИ, второй вход элемента ИЛИ является третьим входом блока управления главным двигателем БУГД, а выход элемента ИЛИ соединён через инвертор НЕ с первым входом логического элемента И, второй вход которого соединён с задатчиком работы режимов главного двигателя ЗГД, а выход логического элемента И соединён с первым входом элемента сравнения ЭС, второй и третий входы которого являются, соответственно, вторым входом блока управления главным двигателем БУГД и выходом датчика обратной связи ДОС, выход же элемента сравнения ЭС соединён через усилитель У с исполнительным механизмом ИМ, механически связанным с сектором газа СГ и датчиком обратной связи ДОС, а выход сигнализатора С соединён с четвёртым выходом блока управления главным двигателем БУГД.
6. Устройство по п.1, отличающееся тем, что блок вычисления курса судна в штормовых условиях БВКСШ состоит из логического элемента И, триггера и модуля вычисления курса судна в штормовых условиях МВКСШ, при этом первый и второй входы логического элемента И являются соответственно первым и третьим входами блока вычисления курса судна в штормовых условиях БВКСШ, а выход логического элемента И соединён с входом S триггера, вход R которого является шестым входом блока вычисления курса судна в штормовых условиях БВКСШ, а выход триггера соединён со вторым входом модуля вычисления курса судна в штормовых условиях МВКСШ, входы 1, 3, 4 которого являются соответственно вторым, четвёртым и седьмым входами блока БВКСМШ, выход же модуля МВКСШ является пятым выходом блока БВКСМШ.
| Камерная печь для без окислительного нагрева изделий из нержавеющей стали | 1960 |
|
SU138640A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ СУДНА ПРИ ВОЗНИКНОВЕНИИ ШКВАЛА | 2009 |
|
RU2392182C1 |
| CN 108045525 A, 18.05.2018 | |||
| CN 106325071 A, 11.01.2017. | |||
