Изобретение относится к технике регулирования, в частности к регуляторам поддержания постоянного значе иия регулируемого параметра работы агрегата, например частоты вращения. Целью изобретения является повышение, точности поддержания регулируемого параметра в широком диапазоне геготератур. .
На фиг.1 схематично изображен регулятор поддержания постоянного значения частоты вращения; на фиг.2 - то же, пример вьшолнения.
Регулятор (фиг. 1) поддержания постоянного значения частоты вращения вала агрегата содержит чувствительный элемент, выполненный в виде центробежных грузов 1, -устанЪвленных на валике 2, кинематически связанном с валом агрегата (не показан), и промежуточной иглы 3, подвижный .орган, вьшолненный в виде золотника 4, испол- нительнь1й механизм, вьтолненный в виде сервопоршня 5, образующий в корпусе 6 две рабочие полости 7 и 8 и соединенный при- помощи выходного, што- ka 9 с регулирующим органом агрегата, например с дроссельной заслонкой воздушной турбины (не показаны), и при помоищ выходного штока 10, снабженного профилированньм элементом 11, с толкателем .12, и задатчик в виде двух . 13 и 14, опирающихся одним из своих торцов через рычаг 15 на золотник 4. Профилированный элемент 11, Толкатель 12 и пружина 14 образуют жесткую обратную связь, а пружина 13, установленная между рычагом 15 и регулировочным винтом 16, образует элемент настройки регулятора на заданную частоту вращения. В корпусе 6 выполнены.канал 17, подводящий под давлением рабочую жидкость к золотнику 4, канал 18, обеспечивающий слив отработанной Жидкости от золотника, и каналы 19 и 20, связывающие золотник соответственно с долостями 7 и В сервопоршня 5. Центробежные грузы 1, профилированный элемент 11, толкатель 12, рычаг 15 и пружины 13 и 14 расположены в полостях корпуса 6, сообщенных между собой при помощи канала 18 и соединенных с общим сливным трубопроводом 21.
Пружины 13 и 14 изготовлены из раз- ных материалов, при этом прзгжина 13
в. диапазоне рабочих температур от Aluji Д° макс имеет одно значение от5
0
ношения силы это пружины при t ;ца(.- к силе при t(vlцц., равное К (при неизменном разме;ре затяжки), а пружина 14 - другое, равное К.
Сила, развиваемая при номинальной частоте вршцения чувствительным элементом, при увеличении температуры увеличивается, благодаря уменьшению Q архимедовой силы, действующей против центробежных сил на центробежные грузы, погруженные в рабочую жидкость, вследствие уменьшения ее плотности.
При отличаю11щхся друг от друга значениях К, и K(i, т.е. , и при любом значении К (отношение силы, воспринимаемой чувствительным элементом в еГо равновесном состоянии, при t«aKC к этой же силе при ) можно всегда подобрать такое соотношение сил первой и второй пружин 13 и 14, при котором регулируемый параметр (частота вращения) при минимальной и макси5 мадьной температурах работы регулятора будет принимать одно и то же значение .
Пусть сила, зависящая от регулируемого параметра и воспринимаемая чувст- вительнь м элементом, при заданном значении параметра при минимальной температуре работы агрегата равна F. Тогда при максимальной температуре эта сила будет равна K«F.
Пусть при минимальной температуре сила первой пружины (или суммарная сила нескольких пружин из первого материала) равна F(, а аналогичная сила пружины (или пружин) из второго материала равна FU. При наличии передаточного механизма кинематической связи между пружинами и чувствительным элементом, например рычага 15, необходимо силы 7 к Yi2 пересчитать, приведя их к точке приложения силы F (в данном случае умножить на соотношение плеч рычага) . При мак.симальной температуре эти силы будут соответственно и KC-F.
Для компенсации температурных погрешностей регулирования необходимо, чтобы равновесие чувствительного элемента при минимальной и при максимальной температурах имело место при одном и том же значении регулируемого
5 параметра, т.е. должны соблюдаться условия: ,
fF,+F.j F; LK,F4+K2F2,K.F.
0
5
0
5
0
(1) (2)
Отсюда
-К
Р К7-К2 . F(
F
Согласно (1) и (2) решение суще- ствует, если , что подтверждает необходимость различия в материалах пружин для такой температурной компенсации.
В частных случаях при сила FJ 0, а при ( сила , т.е. температурная погрешность прзтаины иа какого-либо материала компенсирует тем- пературную погрешность чувствительного элемента. В этом случае пружина из другого материала не нужна.
Поделив (2) на (1), получим
1
(3
F2 Kji-K F К -KQ, Из (3) видно, что, если K, или К, 7К(2,
If- что означает одинаковое направление сил пружин. В остальных случаях (кроме указанных частных случаев)
ih. .
что означает противоположное направление этих сил.
Зависимости температурных погрешностей как чувствительных элементов, так и пружин от температуры близки к линейным, поэтому регуляторы, скомпенсированные указанным способом по режимам минимальной и максимальной температур его работы, имеют практически нулевую те-мпературную погрешность и на промежуточных режимах. Кроме того, линейность этих зависимостей приводит к тому, что результат вычисления отношения сил пружин по указанным формулам практически не зависит от температурного диапазона (все значения К, К( и К2 изменяются пропорционально, и значение отношения
1г
ется тем же).
Регулятор работает следующим образом.
На установившемся режиме центробежные силы, приложенные вследствие вращения вала 2 к грузам 1, передаются через иглу 3 на золотник 4 и уравновешиваются на нем через рычаг 15
вычисленное по формуле (3), оста15998436.
пружинами 13 и 14. Золотник 4 в равновесном положении перекрывает подводящий 17 и сливной 18 каналы корпу- са 6. Вследствие этого каналы 19 и 20, - связывающие полости 7 и 8 сервопорш- ня 5 с золотником 4,. оказываются запертыми и сервопоршень 5 остается в
- .с
ГО
шток 9 регулирующий орган агрегата (дроссельную заслонку турбины) от перемещения. При этом профилированный элемент 11 на штоке 10, оставаясь неподвижным, удерживает через толкатель 12 неизменной затяжку пружины 14. При увеличении частоты вращения вала агрегата, а значит, и вала 2, например, вследствие уменьшения нагрузки цен1робежная сила грузов 1
20 увеличивается, равновесие золотника 4 нарушается и золотник перемещается вверх, сообшая подводящий канал 17 через канал 19 с полостью 7, а сливной канал 18 через канал 20 - с по25 лостью 8. Вследствие этого сервопоршень 5 перемещается вправо, прикрывая с помощью штока 9 дроссельную заслонку турбины, благодаря чему частота вршчения вала агрегата уменьшается и
30 равновесие золотника восстанавливается. При переме1 (ении вправо сервопор ш- ня 5 профилированный элемент 11 через толкатель 12 несколько увеличивает затяжку пружины 14, способствуя более раннему возвращению золотника 4 в равновесное положение и осуществляя вспомогательную отрицательную обратную связь для обеспечения устойчивости регулирования.
40
35
При уменьшении частоты вращения вала агрегата вследствие, например, увеличения нагрузки процесс происходит в обратном направлении.
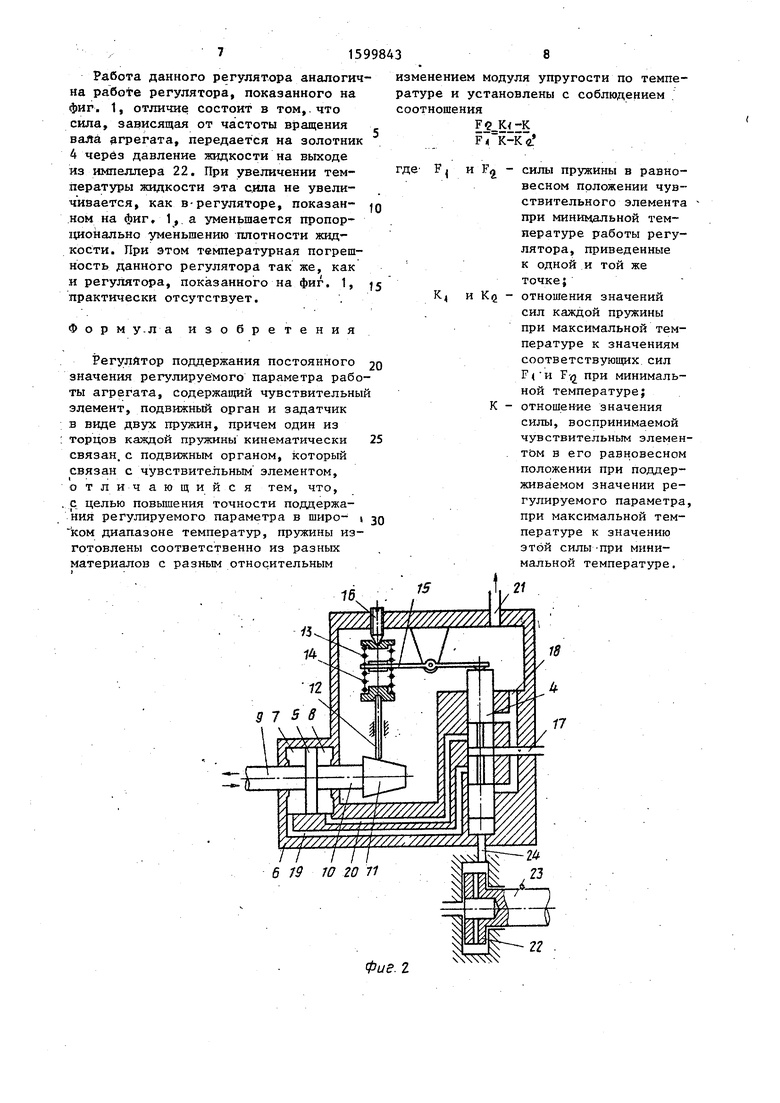
45 Показанный на фиг. 2 регулятор поддержания постоянного значения частоты врар1;ения вала агрегата содержит те же элементы, что и регулятор, показанный на фиг. 1, но отличается от него
50 вьшолнением чувствительного элемента. В регуляторе, показанном на фиг. 2, чувствительный элемент гидродинамического типа выполнен в виде импеллера 22 на валике 23, кинематически свя55 занном с валом агрегата (или непосредственно на валу агрегата). Вход импеллера 22 соединен со сливом, а выход каналом 24 - с нижним торцом золотника 4.
Работа данного регулятора аналогична pa6ote регулятора, показанного на фиг. 1, отличие состоит в том,. что сила, зависящая от частоты вращения вала эгрегата, передается на золотник 4 через давление жидкости на выходе из импеллера 22. При увеличении температуры жидкости эта сила не увеличивается, как в-регуляторе, показанном на фиг, 1, а уменьшается пропор- 1щонально уменьшению плотности жидкости. При этом температурная погрешность данного регулятора так же, как и регулятора, показанного на фиг. 1, практически отсутствует.
Форм у.л а изобретения
Регулйтор поддержания постоянного 20 значения регулируемого параметра работы агрегата, содержащий чувствительный элемент, подвижный орган и задатчик в виде двух пружин, причем один из торцов каждой пружины кинематически связан, с подвижным органом, который связан с чувствительным элементом, отличающийся тем, что, с целью повьшения точности поддержания регулируемого параметра в широ- i ком диапазоне температур, пружины изготовлены соответственно из разных материалов с разным относительным
25
30
16.
изменением модуля упругости по температуре и установлены с соблюдением соотношения
Р4 К-К й
где F
и F
5
0
5
0
/5
силы пружины в равновесном положении чувствительного элемента при минимальной температуре работы регулятора, приведенные к одной и той же точке}
К4 и Kg - отношения значений сил каждой пружины при максимальной температуре к значениям соответствующих сил F( и F- при минимальной температуре; К - отношение значения силы, воспринимаемой чувствительным элемен- . тьм в его равновесном положении при поддерживаемом значении регулируемого параметра, при максимальной температуре к значению этой силы-при минимальной температуре,
21
Фие. 2
Zf

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДОЗИРУЮЩЕЙ ИГЛОЙ РЕГУЛЯТОРА РАСХОДА ТОПЛИВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1989 |
|
SU1780364A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОДАЧИ ТОПЛИВА | 1998 |
|
RU2194182C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКИВАНИЯ ТОПЛИВА | 1990 |
|
RU2009363C1 |
| Регулятор давления турбонасосного агрегата | 1975 |
|
SU588533A1 |
| Центробежный регулятор скорости | 1982 |
|
SU1117599A1 |
| ЭЛЕКТРОПРИВОДНОЙ НАСОСНЫЙ АГРЕГАТ | 1991 |
|
RU2073797C1 |
| Муфта регулирования опережения впрыска топлива | 1985 |
|
SU1273620A2 |
| СИСТЕМА ТОПЛИВОПОДАЧИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 1989 |
|
SU1792127A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ПОДАЧИ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 1986 |
|
SU1417544A1 |
| СИСТЕМА ПОДАЧИ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 1991 |
|
SU1825034A1 |
Изобретение относится к технике регулирования, в частности к регуляторам поддержания постоянного значения регулируемого параметра работы агрегата, например частоты вращения. Целью изобретения является повышение точности поддержания регулируемого параметра в широком диапазоне температур. На установившемся режиме центробежные силы, приложенные вследствие вращения вала 2 к грузам 1, передаются через иглу 3 на золотник 4 и уравновешиваются на нем через рычаг 15 пружинами 13 и 14. Золотник 4 в равновесном положении перекрывает подводящий и сливной каналы 17 и 18 корпуса 6. Вследствие этого каналы 19 и 20, связывающие полости 7 и 8 сервопоршня 5 с золотником 4, оказываются запертыми, и сервопоршень 5 остается в постоянном положении, удерживая через шток 9 регулирующий орган агрегата (дроссельную заслонку турбины) от перемещения. При этом профилированный элемент 11 на штоке 10, оставаясь неподвижным, удерживает через толкатель 12 неизменной затяжку пружины 14. При увеличении частоты вращения вала агрегата, а значит и вала 2, например, вследствие уменьшения нагрузки, центробежная сила грузов 1 увеличивается, равновесие золотника нарушается и золотник перемещается вверх, сообщая подводящий канал 17 через канал 19 с полостью 7, а сливной канал 18 через канал 20 с полостью 8. Вследствие этого, сервопоршень 5 перемещается вправо, прикрывая с помощью штока 9 дроссельную заслонку турбины. 2 ил.
| Авторское свидетельство СССР № 1293708, кл | |||
| С, 05 П 13/14, 1984 | |||
| Р Е Г У Л Я Т О Р С К О Р О С Т И | 0 |
|
SU183502A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
