Изобретение относится к подъемно- трянспортному машиностроению, в частности к шахтным подъемным установкам, и является усовершенствованием изобретения по авт.св. 1Л21661.
Пелъ изобретения - увеличение срока службы установки.
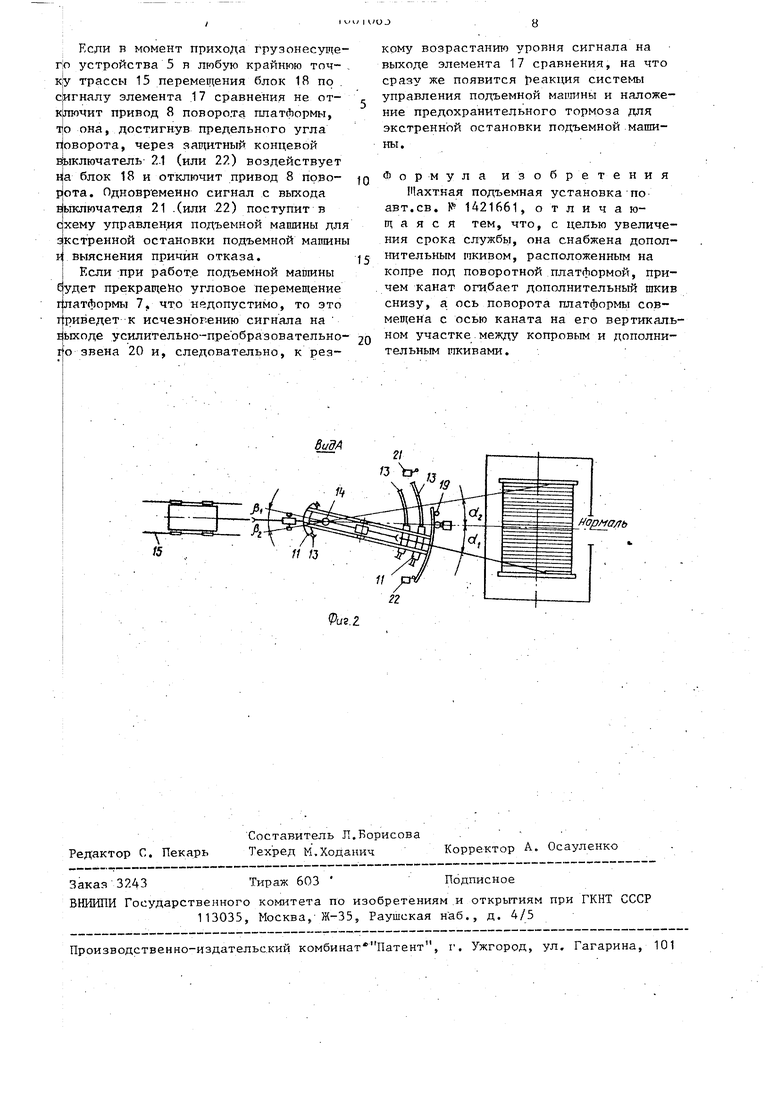
На Лиг. 1 изображена подъемная установка, общий вид; на фиг.- 2 - вид Л на фиг. 1.
Подъемная установка содержит барабанный орган навивки каната - барабан 1 с намотанным на него канатом 2, копровой шкив 3, через который перекинута свободная от намотки часть каната 2, дополнительный шкив 4, который огибается канатом 2 снизу,, гру- зонесущее устройство 5, закрепленное на свободном конце каната 2, датчик
6угла поворота, кинематически связанный с барабаном 1, поворотную платформу 7 и привод 8 поворота, установленный на основной раме 9 -подшкивной площадки.
Поворотная платформа 7 и привод Я кинематически связаны между собой секторной зубчатой рейкой 10. Платформа
7имеет секторные балки 11, покоящиеся на роликах 12., которые опираются на секторные опорные балки 13, установленные на основной раме 9. Шкив 3 размещен на шзворотной платсЬорме 7, ось 1А поворота которой совмещена
с вертикальной линией, проходящей через точку вертикального сходящего каната 2 с копрового шкива 3 к дополнительному шкиву 4, установленному ниже основной рамы 9 подшкивной площадки. После огибания дополнительного шкива 4 канат 2 соединен с грузонесу- щим устройством 5, установленным на наклонной трассе 15 перемещения. Бы- ход датчика 6 угла поворота соединен с входом усилителя 16 сигнала, выход которого соединен с одним из входов элемента 17 сравнения. Выход элемента 17 сравнения через блок 18 управления приводом соединен со схемой управления (не показана) подъемной машины .
На раме 9 подшкивной площадки размещен -датчик 19 угла поворота, кинематически связанный, с поворотной платформой 7 через ее зубчатую рейку 10.. На выходе датчика 19 угла поворота платформы имеется усилительно-преобразовательное звено 20, выход которого соединен с другим (вы
0
5
20
25
30
35
40
45
50
55
читаюг им) входом элемента 17 сравнения. Подъемная установка оснаше.на заи1:итными концевыми выключателями 21 и 22, установленными на раме 9 подшкивной площадки у крайних точек поворота платфо11мы 7. Выход выключателей 21 и 22 защиты включен на вход блока 18 управления приводом поворота и соединен со схемой управления подъемной мапшны. Привод 8, блок 18 управления приводом,датчики 6 и 19 угла поворота платформы и барабана соответственно, усилитель 16, усилительно-преобразовательное звено 20, элемент 17 сравнения и концевые выключатели 21 и 22 образуют следяпщй привод поворота платформы 7.
В качестве дополнительного шкива 4 служит Р1КИВ, серийно выпускаемый отечественной промьгошенностью.
В нерабочем положении подъемной установки грузонесущее устройство 5 находится в какой-то одной крайней точке перемещения, например, наверху. При этом канат 2 намотан на всю ширину навивочной поверхности барабана 1 , поэтому угол з отклонения струны каната от нормали, проведенной от оси 14 поворота платформы к середине навивочной поверхности барабана, равен MaKcnMyNry. На тот же угол |э(, в сторону отклонения струны каната повернута поворотная платформа 7, а вместе с ним и копровой шкив 3, так как-угол foj, образованный вертикальной плоскостью симметрии шкива и линией нормали, практически равен углу 1 Следовательно, угол девиации струны каната отсутствует.
Дополнительный шкив 4 жестко за- креплен на копре в положении, в котором, во-первых, обеспечивается вертикальный сход каната 2 с копрового шки ва 3, во-вторых, его вертикальная плоскость симметрии совпадает с нормалью и с осевой линией перемещения грузонесущего устройства 5 по стволу шахты, поэтому углы, девиации каната 2 на копровом шкиве 3 со стороны грузонесзпдего устройства 5 и на дополнительном шкиве 4 с обеих сторон отсутствуют. .
Подъемная установка работает сле- дуюир-1М образом.
При включении подъемной установки в работу барабан- 1. вращается в сторону сматывания каната 2 с навивочной поверхности барабана, а грузоне
5
сущее устройство 5 перемещается свеху вниз по наклонной трассе 15. По мере сматывания каната 2 с барабана 1 струна каната между барабаном и к . ровым шкивом перемещается ближе к линии нормали, уменьшая значение угла . Одновременно с началом вращения барабана 1 на вход датчика -6 угла поворота поступает сигнал о повороте барабана вокруг своей оси. Сигнал датчика 6 угла поворота преоразуется и усиливается в усилителе и поступает на вход элемента 17 сранения, включенного в схему управления приводом 8 поворота в режиме положительной обратной связи. В. начал 1щкла работы подъема этот сигнал с выхода элемента 17 сравнения через блок 18 управления попадает на вход привода 8 поворота платформы и включает его в работу. Вращение привода поворота через зубчатую рейку 10 передается поворотной платформе. 7, которая вслед за струной каната 2 начинает поворачивать копровой шкив 3 в сторону уменьшения угла fei. Угловое перемещение платформы 7 фиксируется датчиком 19 угла поворота штат- формы. Сигнал с выхода датчика 19 угла поворота поступает на вход звена 20, где преобразуется в электрический сигнал, усиливается, поступает на второй вход элемента 17 сравне ния, но со знаком минус по сравнению
с сигналом, поступаюп5им на его первый вход, и стабилизирует работу привода 8 поворота.
Таким образом, поворот копрового шкива 3 относительно оси 14 поворота и перемещения струны каната 2 относительно линии нормали происходят синхронно, поэтому переменные значения углов t)ff и всегда будут одинаковыми „ Следовательно, между вертикальной плоскостью симметрии копрового шкива 3 и линией струны каната 2 в горизонтально плоскости не будет угла расхождения, т.е. (У/,е р ,.. Не будет угла девиации каната 2 на копровом шкиве 3 и со стороны грузо- несзтцего устройства 5, так как за счет совмещения вертикальной оси 14 поворота платформы 7 с продольной осью вертикально опускающегося каната 2 с поверхности обода копрового шкива 3 на поверхность обода дополни тельного шкива 4 не создаются уело- ВИЯ для образования этого угла при повороте копрового шкива 3 вместе
10
15
с платформой 7 относительно оси 14 поворота. По прибытии грузонесущего устройства 5 в нижнюю крайнюю точку наклонной трассы ствола вращение барабана 1 подъемной машины прекращается, что одновременно вызывает как прекращение перемещения каната 2, так и поступление сигнала с выхода датчика 6 угли поворота на вход блока 18, что вызывает отключение привода 8 поворота и прекращение поворота платформы 7, а следовательно, и копрового шкива 3 относительно нормали. При этом струна каната 2 окажется в другом крайнем положении и относительно линии нормали образует другой угол отклонения, равный углу , а поворотная платформа 7 также 20 окажется в другом крайнем положении и вертикальная плоскость симметрии копрового шкива 3 относительно той же линии .нормали образует угол отклонения 1. Однако углы о{«. и будут 25 равны между собой ((ч, так как прекращение изменения их значений происходит одновременно. Таким образом, пребывание грузонесущего устройства в другом крайнем положении трас- .JQ сы 15 перемещения, когда канат 2 полностью смотан с навивочной поверхности барабана 1, не вызывает образование угла девиации струны каната Д С)2 РЧ. 0« Не будет угла. девиа1щи каната 2 и со стороны грузонесущего 5 устройства .5, что, следовательно, позволяет не ограничивать приближение подъемной маппшы к копровому щкиву 3;
Включение подъемной машины для выполнения следующего цикла работы- вызывает вращение барабана 1 в об- ратнзто сторону, поэтому канат 2 наматывается на барабан 1, грузонесущее устройство 5 вслед за поднимающимся вдоль трассы 15 канатом 2 перемещается вверх, вследствие этого струна каната 2 перемещается в сторону линии нормали и угол уменьшается. В результате вращения барабана 1 в другую сторону на выходе датчика 6 угла поворота сигнал, будет иметь другую полярность по сравнению со случаем, когда выполняется первый
.цикл .и грузонесущее устройство 5 шло вниз. Вследствие этого привод 8 поворота начнет вращаться в другую сторону, обеспечивая поворот поворотной платформы 7 вслед за перемещением струны каната к линии нормали.
0
5
0
Если в момент прихода грузонесуще- rio устройства 5 в любую крайнюю точ- , KJy трассы 15 перемещения блок 18 по . сигналу элемента 17 сравнения не отключит привод 8 повороту платформы, то она, достигнув предельного угла поворота, через защитный концевой выключатель 2.1 (или 2.) воздействует на блок 18 и отключит привод 8 поворота. Пдновр еменно сигнал с выхода выключателя 21 .(или 22) поступит в qxeMy управления подъемной машины для кстренной остановки подъемной мапгины выяснения причин отказа.
Если при работ.е подъемной мапшны будет прекращейо угловое перемещение глатформы 7, что недопустимо, то это гриведет к исчезновению сигнала на выходе усилительно-преобразовательного звена 20 и, следовательно, к рез
кому возрастанию уровня сигнала на выходе элемента 17 сравнения, на что сразу же появится реакция системы управления подъемной машины и наложение предохранительного тормоза для экстренной остановки подъемной машины.
Формула изобретения
Шахтная подъемная установка по авт.св. IS 1421661, отличающаяся тем, что, с целью увеличения срока службы, она снабжена дополнительным шкивом, расположенным на копре под поворотной платформой, причем канат огибает дополнительный шкив снизу, а ось поворота платформы совмещена с осью каната на его вертикальном участке.между копровым и дополнительным шкивами.

| название | год | авторы | номер документа |
|---|---|---|---|
| Шахтная подъемная установка системы Инглата | 1986 |
|
SU1421661A1 |
| Шахтная подъемная установка | 1988 |
|
SU1657461A1 |
| КОПЕР | 2006 |
|
RU2361988C2 |
| Устройство для крепления копрового канатного шкива | 1983 |
|
SU1104089A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ДЕВИАЦИИ | 1966 |
|
SU183411A1 |
| Шахтная подъемная установка | 1981 |
|
SU988736A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПОДЪЕМНЫХ УСТАНОВОК ОТ СХОДА КАНАТА СО ШКИВА | 1992 |
|
RU2039005C1 |
| Наклонная подъемная установка | 1989 |
|
SU1728114A1 |
| Копер для аварийно-спасательных работ | 1981 |
|
SU985302A1 |
| Шахтный копер | 1981 |
|
SU953166A1 |
Изобретение относится к подъемно-транспортному машиностроению, в частности к шахтным подъемным установкам. Цель изобретения - увеличение срока службы установки. Подъемная установка состоит из барабанного органа навивки каната-барабана 1 с намотанным на него канатом 2, копрового шкива 3, через который перекинута свободная от намотки часть каната 2. Дополнительный шкив 4 огибается канатом 2. Грузонесущее устройство 5 закреплено на свободном конце каната 2. Датчик 6 угла поворота кинематически связан с барабаном 1. Установка содержит также поворотную платформу 7 и привод поворота 8, установленный на основной раме 9 подшкивной площадки. 2 ил.
/5
| Шахтная подъемная установка системы Инглата | 1986 |
|
SU1421661A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
