1 в схему уп/эа6лен1/я (( i подъема машс/нь/ вертикали. Установка содержит привод- ь|ой барабан 1 с размещенным на ней ка- щатом 2. На поворотной платформе 6 за- 1 реплен шкив 3 с секторными опорными балками 10, установленными на подшкив- (1ОЙ площадке 8. На канате 2 подвещен со- Ьуд 4. Платформ а 6 имеет следящий при- 1вод, состоящий из датчиков 5 и 17 угла поворота, вход одного из которых кине- Матически связан с барабаном 1, вход другого - с платформой 6 и элемента 15 сравнения. Входы элемента 15 сравнения через усилительно-преобразовательные звенья 14 11 18 связаны с датчиками угла поворота. Блок 16 управления приводом поворота :соединен с выходом элемента 15 сравнения и схемой управления подъемной установки. Зубчатая пара кинематически соединяет привод поворота с платформой 6, ось которой совмещена с вертикальной линией, проходящей через точку схода каната 2 со щкива 3 в щахту. По прибытии сосуда 4 в нижнее положение вращение барабана 1 прекращается, что вызывает перемепхение ка- пата 2 и поступление сигнала с выхода датчика 5 угла поворота на вход блоки 16 управления привода, что вызывает отключение привода 7 поворота и прекращение поворота платформы 6. Если по каким-либо причинам блок 16 управления по сигналу элемента 15 сравнения не отключает привод 7 поворота платформы 6, то она, достигнув гфедельного угла поворота, через защитный концевой выключатель 19 воздействует на блок 16 управления и отключает привод 7. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шахтная подъемная установка системы Инглата | 1988 |
|
SU1601063A2 |
| Подшкивная площадка | 1980 |
|
SU939372A1 |
| Устройство для крепления копрового канатного шкива | 1983 |
|
SU1104089A1 |
| Шахтная подъемная установка | 1988 |
|
SU1657461A1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2031830C1 |
| Система обнаружения застревания сосуда в стволе шахты | 1977 |
|
SU765176A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ПОЛЕЗНОГО ГРУЗА В ПОДЪЕМНОМ СОСУДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2124468C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПОДЪЕМНЫХ УСТАНОВОК ОТ СХОДА КАНАТА СО ШКИВА | 1992 |
|
RU2039005C1 |
| Способ защиты от напуска тягового каната шахтной подъемной установки и аварийной остановки направляющей рамки подъемного сосуда | 1987 |
|
SU1588674A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
Изобретение относится к горной про мышленности, в частности к шахтным нодъе.м- ным установкам. Цель изобретения - расширение эксплуатационных возможностей :iy- тем уменьшения размеров про.мышленноГ: плош.адки и обеспечения возможности схода каната со шкива в ствол шахты в вертикальной плоскости под различными углами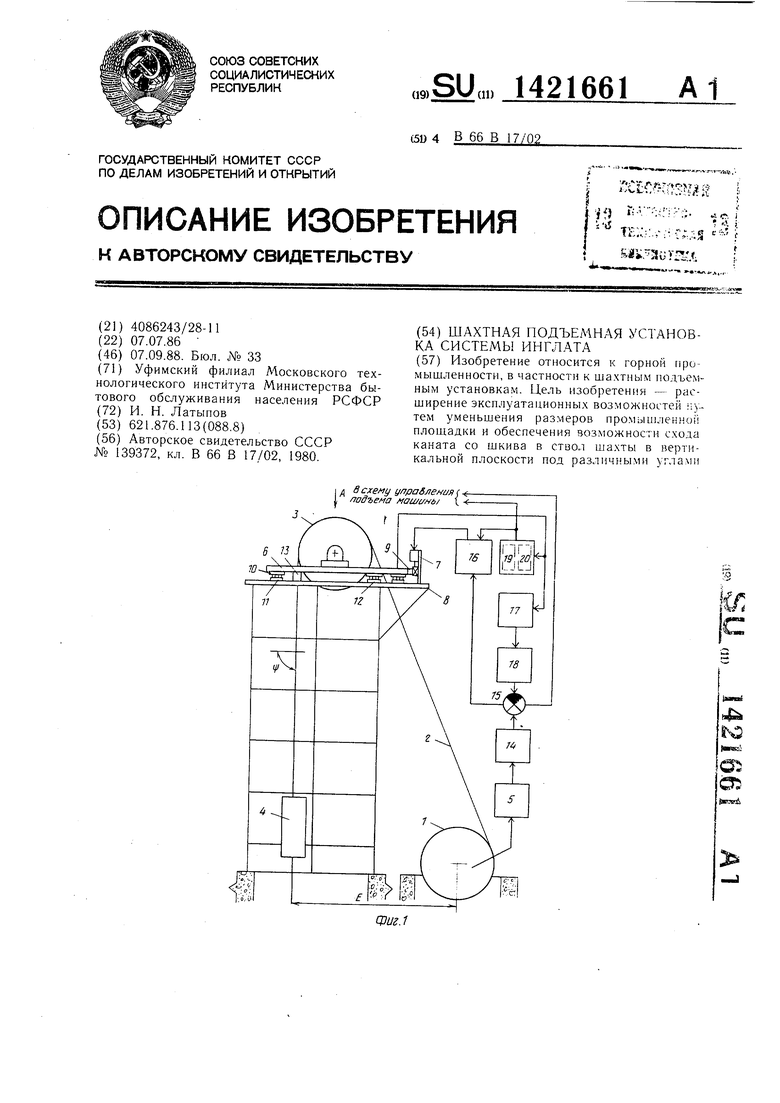
1
Изобретение относится к горной п.ро- .ьинленности, в частности к подъемно- траиспортным установкам, и может быть использовано па вертикальных и наклонных рудничных подъемных установках, предназ- начеш .ых для эксплуатации как на дневной поверхности, так и в подземных условиях.
Цель изобретения - распшреиие экс- П. 1уатацпо1-П1ых возможностей путем умень- размеров промышленной площадки и обеспечения возможности схода каната со П1кива в ствол щахты в вертикальной п, 1оскости под различным угл.ом к вертикали.
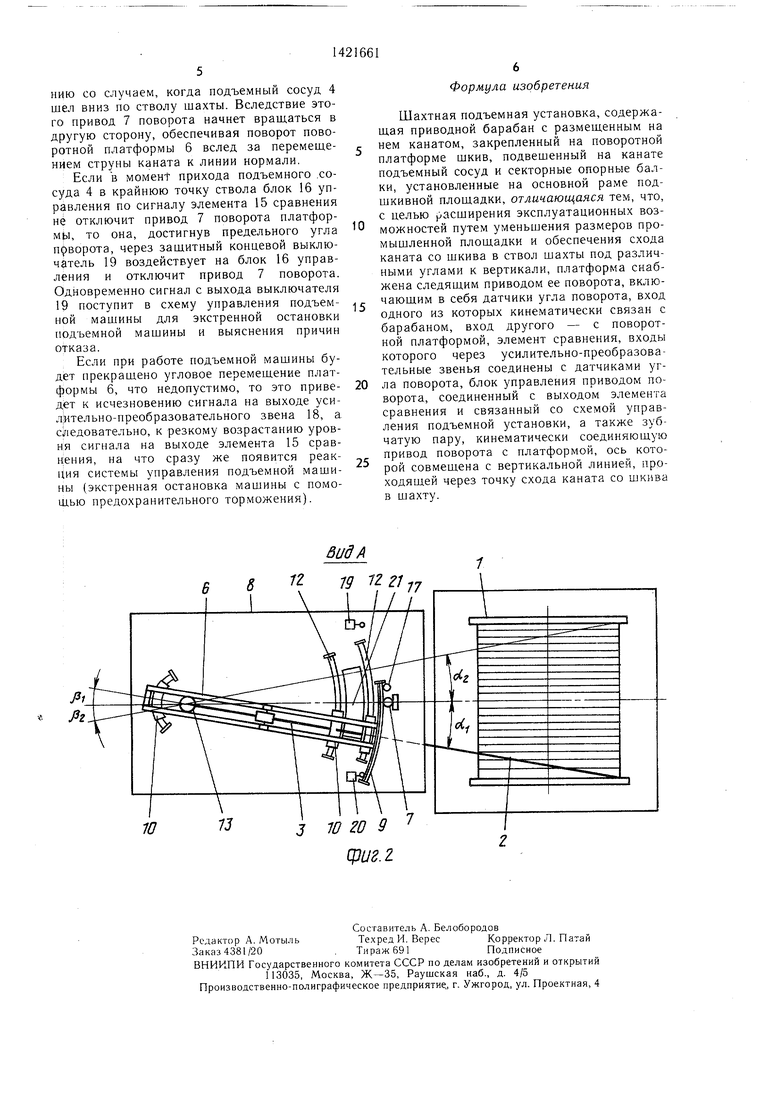
На фиг. 1 изображена подъемная установка, обндий вид; на фиг. 2 -- вид А на фиг. 1
Нод ьемная установка содержит приводной барабан 1 с размещенным на нем канатом 2, Н1КИВ 3, через который нерекинута свободная от намотки часть каната 2, подъемный сосуд 4, закрепленный -на свободном конце каната 2, датчик 5 угла поворота, кинематически связанный с барабаном 1, поворотную платформу 6 и привод 7 поворота, установленный на основной раме В под- щкивной площадки.
Новоротная платформа 6 и привод 7 ново- рота имеют между собой кинематическую связь, для чего поворотная платформа 6 оснащена секторной зубчатой рейкой 9. Кроме того, новоротная нлатформа 6 имеет секторные балки 10, покояп1иеея на роликах 11, которые ониракэтся на секторные опорпые балки 12, устаноЕ ленные на основной раме 8. Шкив 3 разменлен на поворотной платформе 6, которая имеет ось 13 повс;0
5
0
5
2
рота, совмещенную с вертикальной линией, проходящей через точку схода каната 2 со шкива 3 в ствол щахты. Выход датчика 5 yi jia поворота соединен с входом усилителя 14 сигнала, выход которого соединен с одним из входов элемента 15 сравнения. Выход элемента 15 сравнения через блок 16 управления соединен с входом привода 7 поворота и одновременно соединен со схемой управления подъемной машины (не показана) .
На подщкивной плоп;адке 8 размещен датчик 17 yr,:ia поворота, кинематически связанный с поворотной платформой 6 через ее зубчатую рейку 9. На выходе датчика 17 угла поворота п.татформы имеется усилитель- но-преоб1)азовате: ьное звено 18, выход которого сое.,т.ипеп с другим вычитающим) входо.м элемепта 15 сравнения. Подъе.мная установка оснап1ена защитными концевыми выключателями 19 п 20, установленными на подщкивной площадке 8 у крайних точек поворота платформы 6. Выход средств 19 защиты включен на вход блока 16 управле- пия ггривода поворота и соединен со схемой управления подъемной машины. Ввиду того, .что барабан машины располагается очень близко к стволу шахты и на вертикаль- ных стволах струна каната круто спускается со щкива на барабан,, то во избежание соприкосновения каната об основную раму 8 подщкивной нлощадки последняя в месте схода каната 2 со гпкива 3 может имеч ь проем 2.
Нрпвод 7, 16 управления приво- .аом, датчики 17 п 5 угла поворота плат- Ормы и барабана соответственно, усилительно-преобразовательные звенья 14 и 18, элемент 15 сравнения и концевые выключатели 19 и 20 образуют следящий привод поворота платформы 6.
В качестве датчиков 5 и 17 угла поворота служат редукторы, подобные редуктору указателя глубины. Однако выходной вал редуктора датчика 17 угла поворота платформы имеет кинематическую связь с зубчатой рейкой 9, т.е. выходной вал редуктора служит входным валом, а входной вал - вьЕходным. Таким образом, редуктор в данном случае должен быть повы- шаюш,им.
В нерабочем положении подъемной установки подъемный сосуд 4 находится в какой- то одной крайней точке пере.мещения, например наверху. При этом канат 2 намотан ка всю ширину навивочной поверхности барабана 1 (как правило, канат на поверхность барабана укладывается виток к витку в один ряд, в исключительных случаях в два ряда), струна каната имеет максимальное отклонение, (угол ai) от нормали, проведенной от оси 13 поворота платформы, к середине навивочной поверхности ба- рабана. Однако угол девиации отсутствует или незначительный, так как шкив вместе с поворотной платформой повернут от указанной нормали в сторону отклонения струны каната. Вертикальная плоскость симметрии шкива по отношению к линии нормали образует угол (Вь Углы ai и PI равны собой.
Под ьемная установка работает следую- и1,им образом.
При включении подъемной установки в работу барабан 1 враш.ается в сторону сматывания каната 2 с навивочной поверхности барабана, а подъемный сосуд 4 пере- меш.ается сверху вниз по стволу шахты. По .мере сматывания каната 2 с барабана 1 струна каната между барабаном и шкивом перемешается ближе к линии нормали, уменьшая значение угла а. Однако одновременно с началом вращения барабана 1 начинает поступать сигнал.о его повороте вокруг своей оси на вход датчика 5 угла поворота.
Сигнал датчика 5 угла поворота после предварительного усиления и преобразования в звене 14 поступает на вход элемента 15 сравнения, включенного в схему управления приводом 7 поворота в режиме положительной обратной связи. В начале цикла работы подъема этот сигнал с выхода элемента 15 сравнения через блок 16 управления попадает на вход привода 7 поворота платформы и включает его в работу. Вра- шение привода 7 поворота через зубчатую рейку 9 передается новоротной платформе 6, которая вслед за струной каната 2 начинает поворачивать шкив 3 в сторону умень
шения угла PI. Угловое перемещение платформы 6 фиксируется датчиком 17 угла поворота платформы. Сигнал с выхода датчика 17 угла поворота поступает на вход
звена 18, где преобразуется в электрический сигнал,усиливается, поступает на второй вход элемента 15 сравнения, но со знаком минус по сравнению с сигналом, поступающим на его первый вход и стабилизирует работу привода 7 поворота.
Таким образом, поворот шкива 3 относительно оси 13 поворота и nepeMenienne струны каната 2 относительно линии нормали происходит синхронно, поэтому переменные значения углов а и j5i всегда будут
одинаковыми. Поэтому между вертикальной плоскостью симметрии 1пкива 3 и линией стру ны каната 2 в горизонта.тьной плоскости не будет угла расхождения, т.е. pi 2. С повышением скорости движен11я сосуда по стволу, что обычно происходит
в середине ствола, будут ускоряться и процессы изменения значения углов ai и Pi,2 и, наоборот, с нонижением скорости движения сосуда по стволу, что бывает п.еред остановкой сосуда в другой крайней точке
перемещения, процессы изменения значений углов «2 м Р2 будут замедлены.
По прибытии подъемного сосуда 4 в нижнюю крайнюю точку ствола вращение барабана 1 подъемной машины прекращается, что одновременно вызывает как прекращение перемещения каната 2, так и поступление сигнала с выхода датчика 5 гла ворота на вход блока 16 управления привода, что вызывает отключение привода 7 поворота и прекрапление поворота платфор.мы 6, а следовательно, и
щкива 3 относительно нормали. При этом струна каната 2 окажется в другом крайнем положении и относительно линии нормали образует другой угол отклонения, равный углу «2, а поворотная плат(|зорма 6
окажется в другом крайнем положении и вертикальная плоскость симметрии шкива 3 относительно той же .пинии мали образует угол отклонения р2. Однако из-за того, что прекращение изменения значений углов a-i и Р2 происходит одновременно, то эти углы будут равны между собой, т.е. .
После выполнения технологических операций, связанных с погрузочно-разгрузоч- ными работами, подъемная манжна включена в работу, но с вращением барабана 1 в обратную сторону. Поэтому канат 2 наматывается на барабан 1, подъемный сосуд вслед за поднимающимся по стволу канатом 2 перемещается вверх по стволу щахты, вследствие этого каната 2 перемещается в сторону линии норМали и угол а-у уменьшается. В результате вра цения барабана в другую сторону на выходе датчика 5 угла поворота сигна. будет иметь другую полярность по сравнению со случаем, когда подъемный сосуд 4 шел вниз по стволу шахты. Вследствие этого привод 7 поворота начнет вращаться в другую сторону, обеспечивая поворот поворотной платформы 6 вслед за перемещением струны каната к линии нормали.
Если в момент прихода подъемного .сосуда 4 в крайнюю точку ствола блок 16 управления по сигналу элемента 15 сравнения не отключит привод 7 поворота платформы, то она, достигнув предельного угла П1)ворота, через защитный концевой выключатель 19 воздействует на блок 16 управления и отключит привод 7 поворота. Одновременно сигнал с выхода выключателя 19 поступит в схему управления подъемной машины для экстренной остановки подъемной мащины и выяснения причин отказа.
Если при работе подъемной машины будет прекращено угловое перемещение платформы 6, что недопустимо, то это приведет к исчезновению сигнала на выходе уси- лМтельно-преобразовательного звена 18, а следовательно, к резкому возрастанию уровня сигнала на выходе элемента 15 срав- цения, на что сразу же появится реакция системы управления подъемной машины (экстренная остановка машины с помощью предохранительного торможения).
10
13
W W 9 СриВ.2
0
5
0
5
Формула изобретения
Шахтная подъемная установка, содержащая приводной барабан с размещенным на нем канатом, закрепленный на поворотной платформе шкив, подвешенный на канате подъемный сосуд и секторные опорные балки, установленные на основной раме под- шкивной площадки, отличающаяся тем, что, с целью расщирения эксплуатационных возможностей путем уменьшения размеров про- мыщленной площадки и обеспечения схода каната со шкива в ствол шахты под различными углами к вертикали, платформа снабжена следящим приводом ее поворота, включающим в себя датчики угла поворота, вход одного из которых кинематически связан с барабаном, вход другого - с поворотной платформой, элемент сравнения, входы которого через усилительно-преобразовательные звенья соединены с датчиками угла поворота, блок управления приводом поворота, соединенный с выходом элемента сравнения и связанный со схемой управления подъемной установки, а также зубчатую пару, кинематически соединяющую привод поворота с платформой, ось которой совмещена с вертикальной линией, проходящей через точку схода каната со шкива в шахту.
| Малогабаритный пылеводозащищенный магнитный пускатель | 1960 |
|
SU139372A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
