0
о
4 00
Изобретение относится к пиевмоавтома- тике и может быть использовано в системах управления промышленных роботов и манипуляторов.
Цель изобретения - повышение устойчивости и расширение функциональных возможностей.
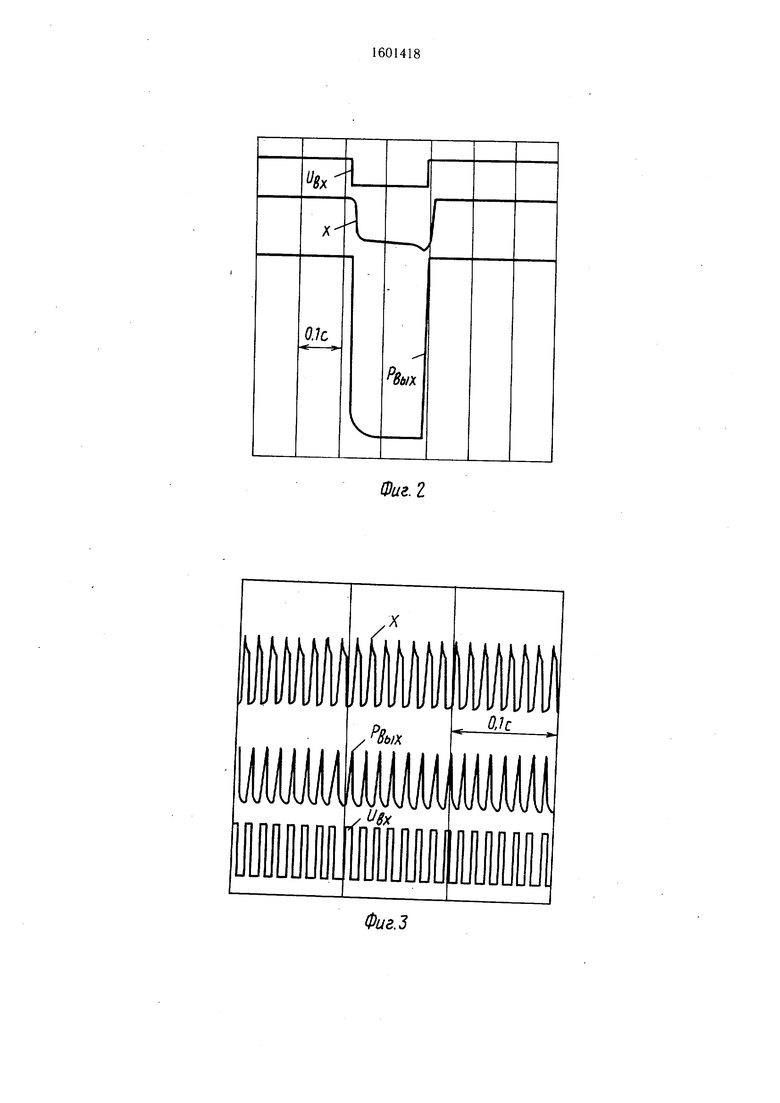
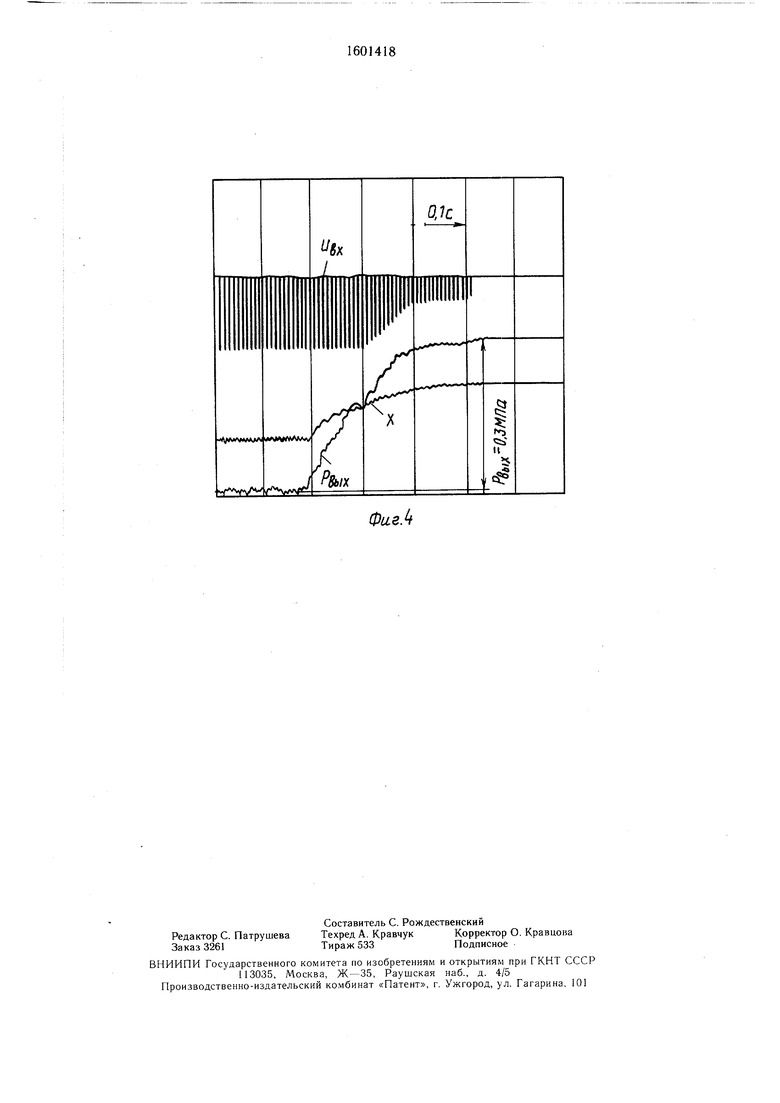
На фиг. 1 изображена схема электропневматического следяш,его привода; на фиг. 2 - осциллограмма переходного процесса изменения выходного пневматического сигнала РВЬЦ, и перемещения х мембранного блока при ступенчатом изменении напряжения U, на электродах; на фиг. 3 - осциллограмма изменения выходjynp , па импп ги входов компа- 19 от генератора 20 поступает
камера 24, между соплом 13 и мембраной 8 - камера 25, между мембраной 8 и обкладкой 16 - камера 26. Мембраны 7 и 8 образуют со штоком 11 мембранный блок. Пневмодвигатель 15 имеет шток 27 и поршень 28.
Электропневматический привод работает следующим образом.
При поступлении электрического аналогового управляющего сигнала - напря- 10 жения UvnD , на один из ратора
сигнал в виде импульсов напряжения симметричной треугольной формы с постоянной несущей частотой, задаваемой генератором.
ного пневматического сигнала PBI,,X и переме- Одновременно на другой вход компаратора щения X мембранного блока при колебатель-19 с выхода сравнивающего устройства 17
поступает непрерывный сигнал в виде напряжения ли, равный разности аналогового управляющего напряжения Uynp и непрерывного сигнала - напряжения и обческого сигнала РЯЫ и перемещения х 20 ратной связи. Сигнал обратной связи Uoc пос- мембранного блока при колебательном из-тупает с преобразователя 18, который подключен к обкладкам датчика перемещения. Так как управляющее напряжение Uynp равно нулю, на компаратор 19 поступает только напряжение (-Uoc ) обратной связи, причем наименьшее по величине, потому что расстояние между обкладками наибольшее, что соответствует наименьшей емкости датчика положения. Для этого случая с компаратора 19 в результате сравнения в
дроссель 6 к источнику давления (не изоб- о двух сигналов напряжений, поступаю- ражен), вторую и третью мембраны 7 и 8щих с генератора 20 и устройства 17, на
ключевой .усилитель 21 поступает сигнал с наименьшей (нулевой) скважностью импульсов напряжения UK, соответствующей постоянному вьжлючению усилителя 21. Поэло 13 подключено к источнику давления, . тому на мембрану 2 и перегородку 4 на- а сопло 12 - к атмосфере, сопла 12пряжение также не поступает и мембрана 2
и 13 установлены с образованием рабочейс жестким центром 3 под действием силы
камеры 14, соединенной с исполнительнымупругости и силы реакции, вытекающей
пневмодвигателем 15.из сопла 5 струи воздуха, находится на
В корпусе 1 размещен емкостный дат-наибольшем удалении от перегородки 4.
чик обратной связи, одна обкладка кото- 40 Газодинамическое сопротивление перемен- рого выполнена заодно с жестким цент-ного дросселя мембрана 2 - сопло 5 миром 10 мембраны 8, а другая обклад-нимально и давление в камере 7 управном изменении напряжения UB на электродах с постоянной амплитудой, несущей частотой и скважностью; на фиг. 4 - осциллограмма изменения выходного пневматименении напряжения Uur на электродах с изменяющейся скважностью.
Электропневматический следящий привод содержит корпус 1 и параллельно установленные первую мембрану 2 с жестким центром 3, неподвижную перегородку .4- с размещенным на ней управляющим соплом 5, выполненным из диэлектрического материала и подключенным входом через
с жесткими центрами 9 и 10, соединенными между собой штоком 11, и противоположно направленные сопла 12 и 13 для взаимодействия с мембранами 7 и 8. Соп25
ка 16 установлена параллельно ей в корпусе 1. Система управления усилителя включает сравнивающее устройство 17, которое соединено входами с задатчиком аналогового сигнала (не изображен) и через преобразователь 18 сигнала емкостного датчика в аналоговое напряжение - с емкостным датчиком, а выходом - с одним из входов компаратора 19, другой вход которого подключен к генератору 20 симметричных треугольных импульсов, а выход через ключевой усилитель 21 и электроды (не изображены) к мембране 2 и перегородке 4.
45
50
Ленин является также наименьшим. Подвижной мембранный блок, состоящий из соединенных штоком 11 мембран 7 и 8 под действием перепада давления на нем находится в крайнем верхнем положении. В таком положении мембранного блока сопло 12 открыто, а сопло 13 полностью закрыто. Камера 14 с каналом выходного давления РВЫХ соединена с камерой 24, подключенной к атмосфере и отсоединена от камеры 25 с давлением питания Рпит . В результате, на выходе камеры 14 имеется наименьшее значение давления, равное атмосферному, что приводит к перемещению
Между мембраной 2 и перегородкой 4 55 штока 27 пневмодвигателя 15 в крайнее образована камера 22, между перегородкой 4нижнее положение под действием, оказыи мембраной 7 - управляющая камераваемым на поршень 28 постоянным дав23, между мембраной 7 и соплом 12
лением подпора Р„. При единичном ступенjynp , па импп ги входов компа- 19 от генератора 20 поступает
поступлении электрического ана управляющего сигнала - напря- vnD , на один из
нимально и давление в камере 7 управ5
0
Ленин является также наименьшим. Подвижной мембранный блок, состоящий из соединенных штоком 11 мембран 7 и 8 под действием перепада давления на нем находится в крайнем верхнем положении. В таком положении мембранного блока сопло 12 открыто, а сопло 13 полностью закрыто. Камера 14 с каналом выходного давления РВЫХ соединена с камерой 24, подключенной к атмосфере и отсоединена от камеры 25 с давлением питания Рпит . В результате, на выходе камеры 14 имеется наименьшее значение давления, равное атмосферному, что приводит к перемещению
ваемым на поршень 28 постоянным давлением подпора Р„. При единичном ступен
чатом изменении напряжения UBX на электродах происходит перебрасывание мембраны 2 к соплу 5 и перемещение х мембранного блока в нижнее положение. Тогда сопло 12 закрывается, а сопло 13 открывается. Камера 14 соединяется с камерой 25 и отсоединяется от камеры 24. В результате, на выходе камеры 4 даааение Р, также изменяется скачком до своего наибольшего значения (фиг. 2). При скачкообразном снятии напряжения U&x с элект- родов происходит скачкообразное перемещение .X мембрагшого блока обратно в верхнее положение и уменьшение выходного сигнала Р&.. (,фиг. 2).
При постуаленин плавно изменяющегося управляющего аналогового электрического сигка.ла у„р на вход сравнивающего устройства 17, сигнал рассогласования ли на его выходе изменяется в сторону увеличения, так как и сигнал положителен. При сравнении данного сигнала ли с импульсным сигналом генератора 20 3 компараторе 19 на его выходе формируется сигнал UV прямоугольной формы импульс.-3 и происходит изменение скважности jTHx импульсов напряжения прямо пропорционально изменению сигнала Ди в сторону увеличения. Ключевой усилитель 21 начинает работать в импульсном режиме не изме.чяя но форме, а только усиливая пос- тупающкй на его вход данный импульсный сигнал UK прямоугольной формы до величи- ны Ure.. Под действием пондеромоторной кулоновской силы, действующей на электро-- ды в сильном переменном электрическом поле. возникаюи1ем между ними, мембрана 2 с жестким центром 3 начинает совершать колебательные движения, притягиваясь к перегородке 4 и перекрывая периодически соп- ло о. Частота колебаний мембраны 2 равна не- сущей частоге импульсов высокого напряжении, поступающих на нее (фиг. 3) Время не ремещенкя мембраны 2 из одного своего крайнего положения в другое значительно меньш-е времени выстоя в каждом из крайних положений у сопла 5 и верхней стенки корпуса 1. Соотношение вре.мени ВЫСТОЙ мембраны 2 у сопла 5 и у верхней стенки корпуса 1 определяется скважностью импульсоз напряжения, поступаю- щих на электроды. Скважность импульсов напряжения прямо пропорциональна сигналу управления . В соответствии с этим мембран-чый блок, состоящий из жестко связанных штоком 11 мембран 7 и 8 пере- -чещается также в колебательном движе- НИИ от упора до упора, т. е. между соп- ани i2 н 16. Время нахождения мембран- лого ол-;.ка в крайних положениях также ог;редоляетс;-1 скважностью импульсов или c.;i налог, управления и,„ . Поэтому в тече- 5 ние од;юи час ш периода расход воздуха дросселируется и подается через камеру 14 в пневмодв1и-атель 15, а в течение другой
5
0
части периода не подается и сбрасывается в атмосферу через камеру 24. Шток 27 с поршнем 28 начинает свое движение вверх со скоростью, определяемой частотой и скважностью импульсов расхода и давления РВЫЖ
Являясь интегрирующим звеном, пневмо- двигатель 15 в силу своей инерционности осуществляет перемещение щтока 27 с поршнем 28 относительно плавно, отрабатывая усредненные значения импульсных величин давления и расхода сж атого воздуха, подаваемого из камеры 14.
С постепенным увеличением несущей частоты генератора 20 время нахождения мембранного блока в своих крайних положениях уменьшается до такой степени, пока мембранный блок только касается сопел 2 и 13. Диаграмма его движения преобразуется из прямоугольной в треугольную форму. При дальнейшем увеличении несущей частоты величина колебательного перемещения мембранного блока становится еще меньше и он перестает касаться сопел 12 и . Его движение приобретает дрожащий или осциллирующий характер с малой амплитудой и мембранный блок так же, как и пневмодвигатель 15, приобретает свойства интегрирующего звена. Перейдя таким образом в непрерывный режим, мембранный блок становится дросселем, выполняя функции регулятора расхода сжатого воздуха в пневмодвигатель 15 (фиг. 4) Положение мембран 7 и 8 мембранного блока относительно сопел 12 и 13, через которые происходит дросселирование сжатого воздуха, регулируется в этом случае усредненным значением импульсного давления в управляющей камере 23. Это значение давления определяется скважностью электрических импульсов напряжения, поступающего на электроды, и регулируется величиной управляющего непрерывного сигнала Цпр . В свою очередь, положение мембранного блока определяет величину емкости датчика положения и величину сигнала обратной связи Uoc . Поэтому при изменении величины управляющего непрерывного сигнала Uynp перемещение мембранного блока происходит до тех пор, пока также изменяющийся в результате этого перемещения сигнал обратной связи UW не скомпенсирует данное изменение упрааляю- щего сигнала . После этого мембранный блок остановится. Каждому положению мембранного блока соответствует свое значение выходного давления Рв, следовательно, вполне определенное промежуточное положение поршня 28 со штоком 27 пневмодвигателя 15.
При дальнейщем увеличен-,ж неппепыв ного управляющего сигнала и.Гр (или
ди) и постоянной несущей частоте происходит прямопропорциональное увеличение скважности импульсов напряжения на выходе компаратора 19 и, соответственно, на выходе усилителя 21. Это приводит к увеличению времени выстоя жесткого центра 3 мембраны 2 на сопле 5. Поэтому усредненная величина импульса сжатого воздуха в камере 23 увеличивается, а мембранный блок перемеи1ается вниз в направлении от камеры 23. Наконец, при наибольшей скважности импульсов напряжения электрический усилитель 21 постоянно включен, а мембрана 2 с жестким центром 3 постоянно перекрывает сопло 5. Давление в междроссельной камере 23 увеличивается до наибольшего своего значения, равного давлению питания Рпит- Тогда мембранный блок займет такое положение, при котором жесткий центр 10 мембраны 8 полностью откроет сопло 13, а жесткий центр 9 мембраны 7 полностью закроет сопло 112, При этом камера 14 соединится с камерой 25, одновременно отсоединившись от камеры 24 с атмосферным давлением. Давление в камере 14 станет равным своему наибольшему значению - давлению питания Рпш- (фиг. 4), и шток 27 с поршнем 28 пневмодвигателя 15 под действием этого давления Рпит займут свое крайнее верхнее положение.
Таким образом, любое изменение задающего непрерывного управляющего сигнала приводит к изменению положения мембранного блока и, следовательно, к прямо пропорциональному изменению давления и расхода на выходе усилителя. В результате, реализуется пропорциональное управление распределителем, т. е. соответствие уровня выходного пневматического сигнала уровню задающего аналогового электрического сигнала.
0
Формула изобретения
1.Электропневматический следящий привод, содержащий корпус и параллельно установленные в нем первую мембрану с
жестким центром, неподвижную перегородку с размещенным на ней управляющим соплом, подключенным входом через дроссель к источнику давления, а выходом - к атмосфере, вторую и третью мембраны с жесткими центрами, соединенными между собой щтоком, и два противоположно направленных сопла для взаимодействия с второй и третьей мембранами, одно из которых подключено к источнику давления, а другое - к атмосфере, установленных с образованием рабочей камеры, соединенной с исполнительным пневмодвига- телем, а также систему управления с источником импульсов напряжения, связанным с первой мембраной и неподвижной перегородкой, отличающийся тем, что, с целью повыщения устойчивости и расширения функциональных возможностей, он снабжен емкостным датчиком обратной связи, одна обкладка которого выполнена заодно с третьей мембраной, а другая установлена парал5 лельно ей в корпусе.
2.Привод по п. 1, отличающимися тем, что система управления выполнена в виде преобразователя сигнала емкостного датчика в аналоговое напряжение, сравнивающего устройства, задатчика аналогового
0 сигнала, компаратора и ключевого электронного усилителя, а источник импульсов напряжения - в виде генератора симметричных треугольных импульсов, при этом сравнивающее устройство соединено входами с задатчиком аналогового сигнала и через
5 преобразователь сигнала - с емкостным датчиком, а выходом - с одним из входов компаратора, другой вход которого подключен к генератору импульсов, а выход через ключевой усилитель - к первой мембране и неподвижной перегородке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления частотно- иМпульСНыМ дОзАТОРОМ | 1979 |
|
SU817480A1 |
| Аналоговый электропневматический преобразователь | 1988 |
|
SU1673755A1 |
| Пневматический реверсивный привод запорного органа трубопроводной арматуры | 1979 |
|
SU863951A1 |
| Устройство для измерения инфразвуковых колебаний среды | 2020 |
|
RU2738766C1 |
| Устройство для измерения давления | 1988 |
|
SU1619081A1 |
| Гидравлический регулятор | 1973 |
|
SU460528A1 |
| Регулятор давления газообразного топлива ДВС | 1989 |
|
SU1649510A1 |
| Устройство для измерения инфразвуковых колебаний среды | 2020 |
|
RU2738765C1 |
| Пневматический аналоговый усилитель | 1985 |
|
SU1355980A1 |
| Пневматический логический элемент | 1977 |
|
SU732593A1 |
Изобретение относится к пневмоавтоматике и может быть использовано в системах управления промышленных роботов и манипуляторов. Целью изобретения является повышение устойчивости и расширение функциональных возможностей. При единичном ступенчатом изменении напряжения Uвх на электродах, происходит перебрасывание мембраны 2 к соплу 5 и перемещение мембранного блока в нижнее положение. Сопло 12 закрывается, а сопло 13 открывается, и на выходе камеры 14 давление Pвых изменяется скачкообразно до наибольшего значения. В случае подачи плавно изменяющегося управляющего аналогового электрического сигнала Uупр на вход устройства 17 на выходе компаратора 19 формируется сигнал прямоугольной формы импульсов и происходит изменение скважности пропорционально изменению сигнала рассогласования ΔU. Усилитель 21 переходит в импульсный режим. Частота колебаний мембраны 2 равна несущей частоте импульсов. Время нахождения мембранного блока в крайних положениях определяется скважностью импульсов или сигналом Uупр. Шток 27 совершает движение вверх со скоростью, определяемой частотой и скважностью импульсов расхода и давления Pвых. Любое изменение задающего непрерывного управляющего сигнала приводит к изменению положения мембранного блока и, следовательно, к прямо пропорциональному изменению давления и расхода на выходе усилителя. 4 ил.
Фиг. 2.
Фиг.З
%
/
MJVtf AMV
«5i 11 X.
c
Фаг.
| Электропневматический (электрогидравлический) распределитель | 1978 |
|
SU883575A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
