(54) ПНЕВМАТИЧЕСКИЙ РЕВЕРСИВНЫЙ ПРИВОД ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь силового воздействияВ пНЕВМАТичЕСКий СигНАл | 1979 |
|
SU830157A2 |
| Установка для определения термической стойкости веществ | 1985 |
|
SU1293566A1 |
| ГЕНЕРАТОР ИМПУЛЬСОВ | 1992 |
|
RU2032840C1 |
| Пневмопривод прерывистого вращательного движения | 1982 |
|
SU1092309A1 |
| Вакуумное реле | 1983 |
|
SU1232969A1 |
| Установка для определения термической стойкости веществ | 1983 |
|
SU1087826A1 |
| Преобразователь силового воздействияВ пНЕВМАТичЕСКий СигНАл | 1979 |
|
SU800716A2 |
| Пневмопривод прерывистого вращательного движения | 1981 |
|
SU992852A1 |
| Устройство для управления доильным аппаратом | 1989 |
|
SU1811779A1 |
| Суммирующее устройство | 1982 |
|
SU1188757A1 |
Изобретение относится к средствам пневмоавтоматики и может быть использовано с трубопроводной арматурой в химической, нефтехимической и газоперерабатывающей промышленности для повышения надежности работь в условиях агрессивных сред.
Известен привод для работы с трубопроводной запорной арматурой, который содержит пневмодвигатели поршневого или мембранного типа и храповой механизм, установленный на выходном валу для преобразования возвратно-поступательного движения штока или мембраны во вращательное движение выходного вала 1.
Недостатком данного привода является его низкая надежность, за счет остановки привода, если не удается открыть (закрыть) запорный орган первым усилием.В данном случае на запорный орган действует постоянное по времени и величине усилие. В химической промышленности запорная арматура нередко работает в агрессивных средах, где седло может прикипать к клапану. Можно увеличить крутящий момент, мощность пневмопривода, однако это потребует увеличения веса и габаритов, а это нерационально, так как такая мощность необходима кратковременно в начальный момент работы.
Наиболее близким к предлагаемому является пневматический реверсивный привод запорного органа трубопроводной арматуры, в корпусе которого расположен механизм преобразования возвратно-поступательного движения во вращательное, установленный на валу и управляемый пневмодвигателями, подключенными через пневмоусилители к генератору импульсов 2.
10
Недостатком такого устройства является то, что если генератор настроить на большую частоту, то он быстро разрушает накипь, однако появляется большое перерегулирование, что сказывается на качестве готового дукта в системах управление, и которых не участвует. Можно настроить его на малую частоту, но появляется запаздывание, что также скажется на качестве готового продукта.
Цель изобретения - расширение области использования и повышение надежности работы.
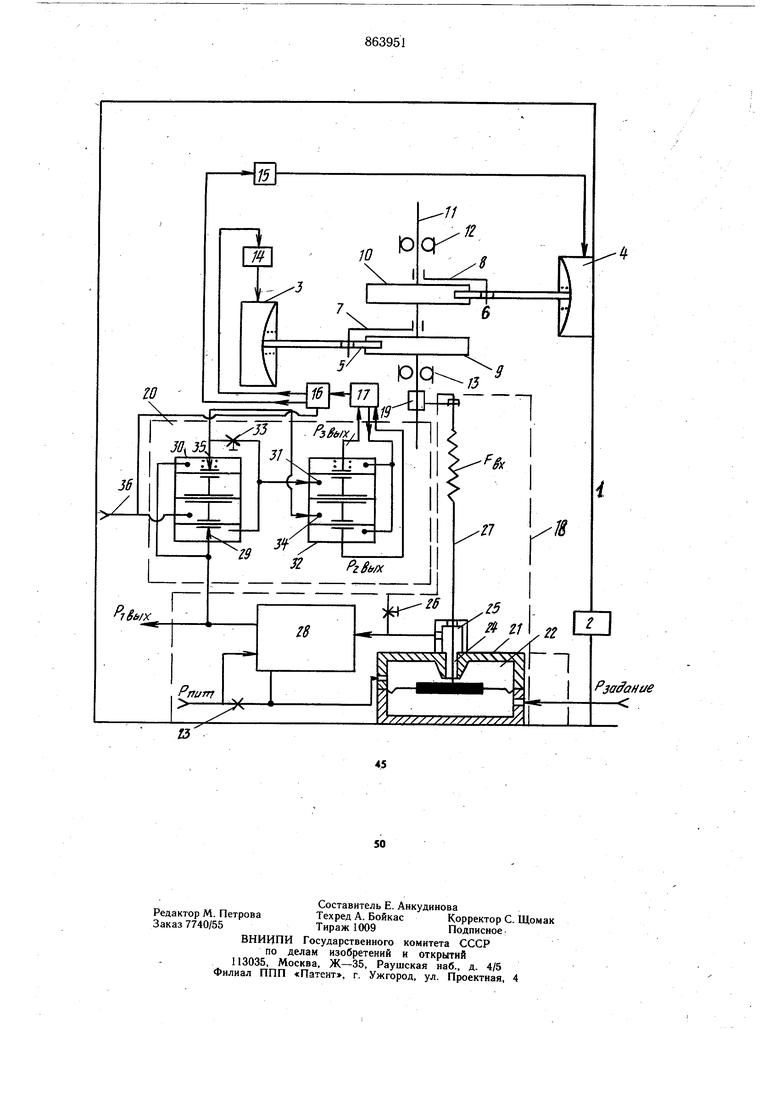
Поставленная цель достигается тем, что привод снабжен датчиком положения запориого органа и связанным с ним узлом опредс.чения состояния вала, соединенным с генератором импульсов. На чертеже схематически изображено предлагаемое устройство. Пневматический реверсивный привод содержит герметичный корпус 1 с запорным органом 2, пневмодвигатели 3 и 4, на штоках которых установлены собачки 5 и 6, удерживаемые водилами 7 и 8 в зацеплении с храповыми колесами 9 и 10, жестко установленными на валу 11. Вал 11 расположен в подгнипниках 12 и 13. Входы пневмодвигателей 3 и 4 подключены к выходу усилителей 14 и 15. Входы усилителей через реле реверса 16 подключены к выходу генератора 17 импульсов. Датчик 18 положения запорной арматуры через кинематическое соединение 19 связан с валом 11. Выход датчика 18 соединен с узлом 20 определения состояния вала, выход которого связан со входом генератора 17. Датчик 18 и узел 20 содержит одномембранный элемент 21 с проточной камерой 22, которая через дрос.сель 23 подключена к каналу питания РПУГГ , а через сопло 24 соединена с дополнительной камерой, которая через второй дроссель 26 связана с атмосферой. Жесткий центр мембраны соединен со струной 27, проходящей через сопло 24, причем дополнительная проточная камера 25 установлена соосно струне 27 и связана непосредственно с первым сумматором 28, второй вход которого подключен к проточной камере 22 одномембранного элемента 21, а выходной сигнал PIBHX сумматора 28 одновременно через сопло 29 пневмореле 20 подключен к первому входу 31 второго пневмореле 32, а через пневмосопротивление 33 к второму BXOду 34 пневмореле 32. Кроме того, выходной сигнал PiBbix с.умматора через сопло 35 пневмореле 30 подключено непосредственно ко второму входу 34 второго пневмореле 32 и через то же пневмосопротивление 33 к первому входу 31 второго пневмореле 32. Вход 36 пневмореле 30 подключается в случае, если увеличивается входное усилие Fg натяжения пружин связанное кинематически узлом 19 с валом 11, и отключается, если FBX уменьшается. Сигнал Рабых в одном из сопел пневмореле 32 появляется тогда, когда начинает изменяться Рв) , т.е. он характеризует динамическое состояние входного силового воздействия FBX , а значит и вала П. Сигнал появляется, когда Fgy не изменяется, . т.е. он характеризует статическое состояние Fex, а значит и статическое состояние вала 11. Р,внх характеризует текущее значение FBX (текущее положение вала 11). Сигналы Ргвых и РЗВЫХ используются для управления частотой генератора. Импульсь с генератора 17 поступают на реле 32 и, в зависи мости от выходов Ргьмх или РЗ вь1х изменяют скачкообразно частоту с помощью пнев мосопротивлений (на схеме не показаны). Датчик 18 с узлом 20 работает следующим образом. Струна 27 воспринимает входное усилие Fg. Выход сумматора 28 Р,вых пропорционален Fg. Если вал 11 не вращается, то не изменяется и сиг-нал Piwix , а это значит, что Р,вь1х проходя через сопло 29 или 35, пневмореле 30 и дроссель 33, приводит к равенству сигналов на входе 31 н 34 пневмореле 32, в котором под действием пружины закрыто сопло выхода PZBHX и открыто сопло выхода Psebjx , и FBX не изменяется. При этом сигнал на входе 36 нневмореле 30 может поступать или быть отключен. Если Ff)( начнет увеличиваться, то начнет (вал 11 вращается, пружина растягивается) увеличиваться Р)аык и на вход 36 пневмореле 30 сигнал не поступает. Под действием пружины пневмореле 30 закрывается соплом 29. Сигнал PiBbix увеличивается во времени и через сопло 35 пневмореле 30 непосредственно поступает на вход 34 пневмореле 32. Одновременно сигнал PiBbix через пневмосопротивление 33 поступает на вход 31, что вызывает увеличение сигнала на входе 31 с меньшей скоростью. За счет разницы давле- НИИ на входах 34 и 31 мембранный блок перемещается вниз и закрывает сопло канала РЗВМХ и открывает сопло Ргви , что свидетельствует о динамическом состоянии (о изменении) FBX и, следовательно, вала 11, генератор 17 уменьшает свою частоту и вал 11 вращается медленнее. Если подается команда на уменьшение , т.е. команда на вращение вала 11 в другую сторону, то одновременно появляется сигнал на реле реверса 16 и на входе 36 пневмореле 30, под действием которого мембранный блок перемещается вниз, закрывает сопло 35 и открывает сопло 29, что и приводит к равенству сигналов на входе 31 и 34 пневмореле 32, причем под действием пружины мембранный блок перемещается вверх, закрывает сопло выхода Равых и открывает сопло , что свидетельствует о прекращении изменения FBX и вращения вала 11. В момент команды «реверс вал 11 останавливается на некоторое мгновение и узел 20 принимает исходное состояние. Есл.и команда «реверс не поступает, а FBX перестает увеличиваться, то перестает увеличиваться и Рцых, Через некоторое время за счет пневмосопротивления 33 сигналы на входе 31 и 34 сравняются (вал 11 не вращается) и под действием пружины, Ргвых отключается и включается PjBbix 4° говорит о статическом состоянии вала 11. Если подается команда «реверса на уменьщение ff при вращении вала 11 в другую сторону, то появляется сигнал на входе 36 реле 30 и 16. Сопло 35 закрывается а сопло 29 открывается. Равенство сигналов 31 и 34 не меняется. При/уменьшении Fg уменьщается Р,вмх и через сопло 29 непосредственно уменьщает сигнал на входе 31, а через пневмосопротивление 33 на входе 34. В результате на входе 34 формируется повышенное давление, которое перемешает мембранный блок пневмореле 32 вниз и закрывает сопло PjBbiK и открывает сопло Pjtux . что характеризует динамическое состояние вала И, и изменяет частоту генератора 17. Привод работает следуюшим образом. Генератор 17 вырабатывает импульсы, которые через- реле 16 поступают на усилитель 14 или, в случае подачи сигнала «реверс, на усилитель 15. Сигнал с усилителя 14 поступает на пневмодвигатель 3, шток которого с собачкой 5 совершает возвратно-поступательное движение, вращая храповое колесо 9 и вал 11, который изменяет проходное сечение запорной арматуры и, следовательно, расход. Одновременно вал 11 через кинематическое соединение.19 изменяет Fgii и датчик 18 выдает сигнал P,Bti(x о текущем положении вала 11 и запорной арматуры, а сигналы P,,ei.ix свидетельствуют о том, вращается ли вал или нет и в зависимости от этого изменяют частоту генератора. Если запорная арматура прикреплена, то частота генератора резко возрастает, что сокращает время ее разрушения. Если вал 11 начал вращаться, то уменьшается частота генератора и это позволяет остановить привод с наименьшим перерегулированием, т. е. повысить точность регулирования расходов. При команде «реверс (подача сигнала 36) работа привода аналогична вышеописанному. В этом случае с генератора поступают сигналы на усилитель 15 и вал 11 вращается в другую сторону. Датчик 18 работает следующим образом. Датчик включается в работу путем подачи давления питания и сигнала Р аданме (с помощью последнего настраивается нуль). Величина сигнала Рзадание должна быть больше максимально возможного давления в герметическом корпусе. Струйа 27 воепринимает входное усилие Fex пружины, при этом мембрана прогибается и жесткий центр перекрывает сопло 24, что вызывает изменение давления в проточной камере 22. По принципу компенсации в проточной камере формируется давление сжатого воздуха; пропорциональное входному усилию FUJ , которое пропорционально перемещению кинематического узла 19. При этом в проточной камере 22 накапливается статическая ошибка и ошибка возмушения, например, за счет изменения давления воздуха в корпусе 1. Поток воздуха в корпусе 1, проходяш,ий через сопло 24 и дроссель 26,. создает в проточной камере 25 давление, зависяш.ее от величины входного усилия (статической ошибки, ошибки возмуш,ения и т. д. Изменяя проводимость дросселя 26, изменяют величину этого давления и тем самым величину корректирующего воздействия, что позволяет настраивать градуированную характеристику датчика 18. Сигналы с камеры 22 и 25 поступают на вход сумматора 28, где и происходит коррекция статической ошибки и ошибки, возникающей за счет изменения давления в корпусе 1, возникающей, когда привод отключен и в нем понижается давление за счет возможных утечек по сравнению с рабочим состоянием привода, когда во времени может изменяться проходное сечение клапана за счет образования всевозможных отложений на клапане. Технико-экономический эффект заключается в расширении области использования и повышении надежности работы. Формула изобретения Пневматический реверсивный привод запорного органа трубопроводной арматуры, в корпусе которого расположен механизм преобразования возвратно-поступательного движения во вращательное,установленный на валу и управляемый пневмодвигателями, подключенными через пневмоусилители к генератору импульсов, отличающийся тем, что, с целью расширения области использования и повышения надежности работы, привод снабжен датчиком положения запорного органа и связанным с ним узлом определения состояния вала, соединенным с генератором импульсов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 246236, кл. F 16 К 31/56, 1968. 2. Патент ФРГ № 896440, кл. 47 g, 43/01, 1953.
