Изобретение относится к контрольно-измерительной технике и может быть использовано, в частности, для контроля дисперсных систем, например, определения размеров частиц, их концентрации и др.
Известен способ измерения параметров дисперсной системы, заключающийся в воздействии на нее пучком когерентного электромагнитного излучения, регистрации путем сканирования мгновенного распределения интенсивности в направлении сканирования и обработке результатов измерен| й, заключающейся в исследовании спектра пространственных флуктуации интенсивности р .
Недостатком данного способа является то, что оно имеет недостаточную :
точность определения размеров частиц, измеряемый диапазон которых в пределах 1 200 - 300 мкм, и низкую точность определения концентрации частиц в дисперсной системе.
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является способ контроля качества оптических систем, заключающийся в том, что формируют пространственно периодический сигнал нулевой частоты, пропускают его через систему, регистрируют амплитуду сигнала, меняют его частоту до максимальной, регистрируют спектр амплитуд сигналов и определяют качество системы 2.
Данный способ не позволяет контролировать дисперсные системы.
О5
о сд
ГчЭ
Цель изобретения - контроль также и- дисперсных систем.
Для достижения указанной цели в спектре амплитуд сигналов фиксируют чЦстоту, с которой амплитуда сигнала остается постоянной, и по величине о|гношения амплитуд сигналов нулевой и; фиксированной частот судят о параметрах системы,
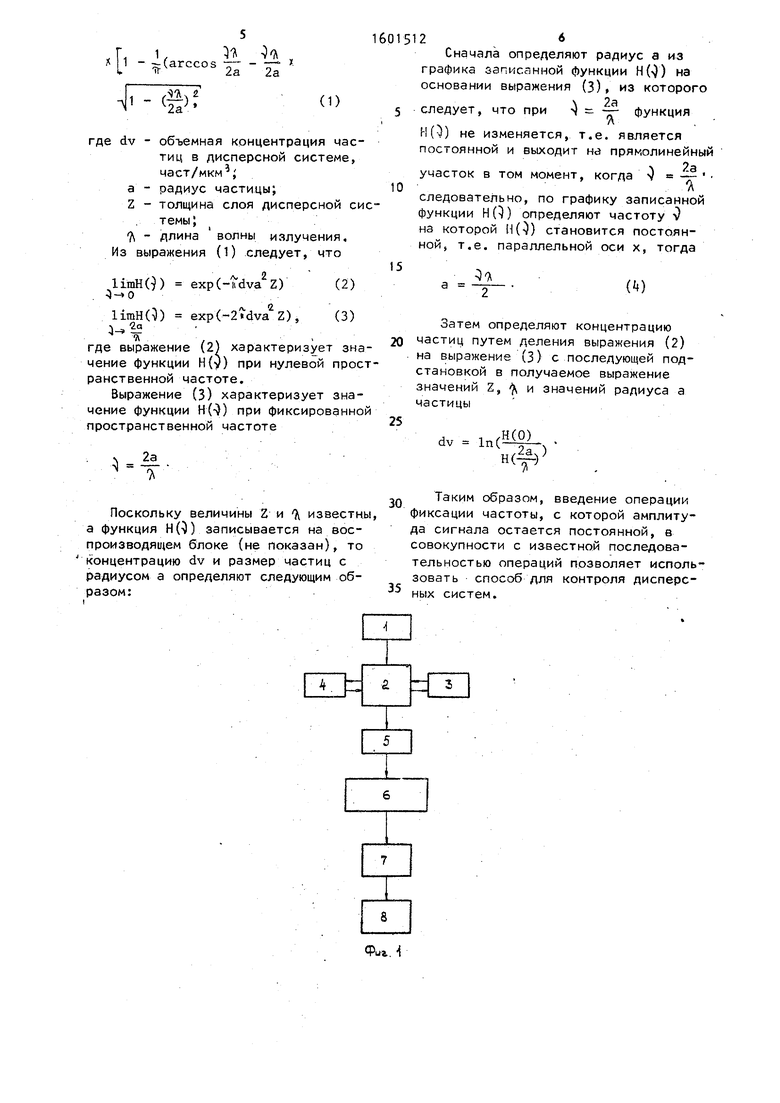
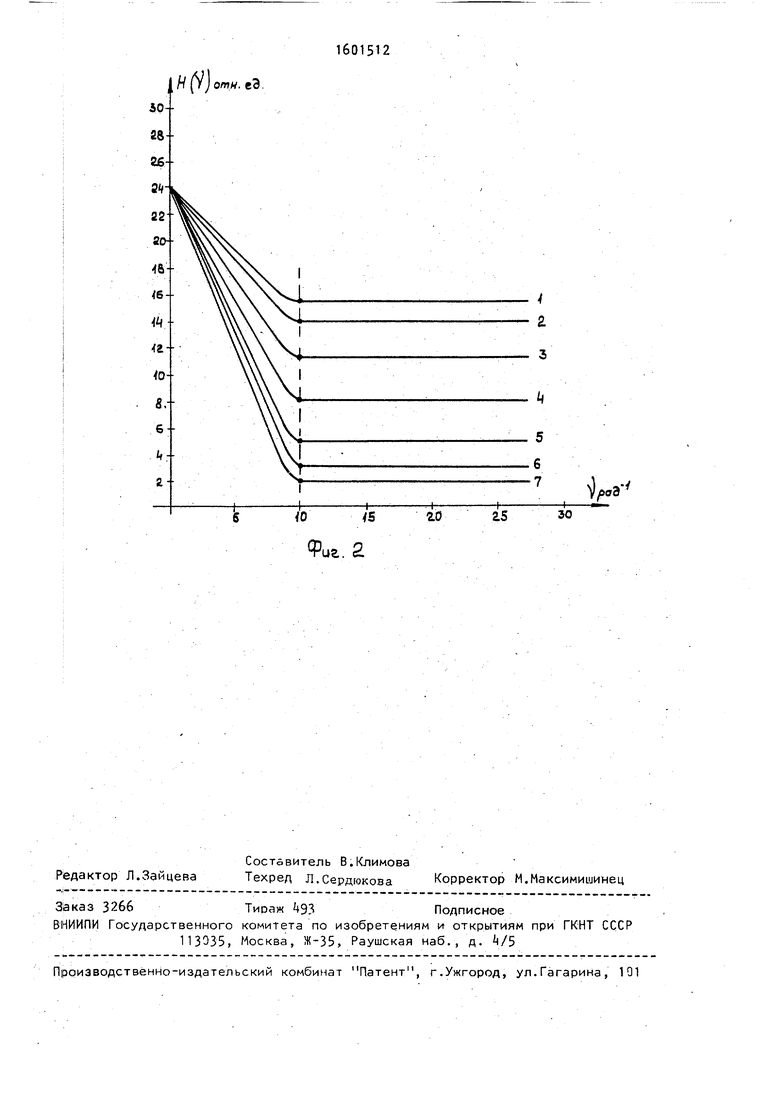
; На фиг. 1 приведена блок-схема устройства, реализующего способ} на Ф.ИГ. 2 - графики функций, характеризующих амплитуду пространственно периодического сигнала.
I Способ осуществляют с помощью устройства, состоящего из источника 1 электромагнитного излучения, которое поступает на формирователь 2 пространственно периодического сигнала с нулевой пространственной час- , т|этой, функционально связанного с IбЬоком 3 изменения пространственной частоты и блоком ( перемещения си1- нЬла, с формирователем 2 связан пе- р|эдающий сформированное излучение блок 5. Передающий блок 5 направляет излучение на исследуемую дисперсную систему 6, за которой находится регистрирующий блок 7 выход которого связан с блоком 8 обработки информации, в котором сигнал усиливается и : детектируется.
; Способ осуществляют следующим образом,
; От источника 1 пучок электромагнитного излучения поступает на формирователь 2 пространственно периодического сигнала, где формируется сигнал с нулевой пространственной частотой. Пропускают сигнал через передающий блок 5 и систему 6 и фиксируют в плоскости регистрирующе™ го блока 7 значение амплитуды сигнала с нулевой пространственной частотой, т.ео при периоде сигнала,равном бесконечности, после чего меняют пространственную частоту с помощь блока 3 до определения максимальной величины, которая выбирается в зависимости от того диапазона размеров частиц, который присутствует в испытуемой дисперсной системе.
После прохождения пространственно периодического сигнала с изменяюи1ей ся пространственной .частотой через исследуемую дисперсную систему б регистрируют блоком 7 значения амплиту сигнала при различных пространствен
0
5
0
5
0
5
0
5
0
5
ных частотах путем сканирования, которое осуществляют перемещением пространственно периодического сигнала перпендикулярно направлению распространения электромагнитного излучения. Данное сканирование необходимо для того, чтобы осуществить преобразование пространственно периодического сигнала в электрический сигнал путем модуляции приемного элемента (на фиг. 1 отсутствует) блока 7.
После регистрации пространственно периодический сигнал, преобразованный в электрический, обрабатывается в блоке 8 путем усиления и детектирования, а затем воспроизводится в виде спектра амплитуд пространственно периодического сигнала, находящегося в функциональной зависимости от пpoctpaнcтвeннoй частоты сигнала.
Информацию о дисперсной системе получают путем анализа характера изменения спектра амплитуд пространственно периодического сигнала, как функции пространственной частоты, в частности, по отношению амплитуд сигналов нулевой и фиксированной частот, или путем анализа характера изменения пространственного распределения . интенсивности в плоскости приемного элемента блока 7 исходя из зависимости
i(x )coH(),
где X - координата в плоскости приемного элемента;
- функция, характеризующая
форму пространственно периодического сигнала в плоскос- . ти приемного элемента; H(v) - функция, характеризующая амплитуду пространственно периодического сигнала,т,е„ представляющая собой спектр амплитуд сигнала cosOx в плоскости приемного элемента, в зависимости от пространственной частоты. Данная функция представляет собой
пространственный спектр индикатриссы
рассеяния исследуемой дисперсной
системы.
Для монодисперсной системы функция
Н{) равна
HQ) ехр -2 J dva Z
V П ,
::(агссоз -- - - х
1()2
4а
где dv - объемная концентрация частиц в дисперсной системе, част/мкм j а - радиус частицы; Z - толщина слоя дисперсной сис. темы;
7 - длина волны излучения. Из выражения (1) следует, что
limH() expC-tdva Z) (2) - о
limH() exp(-2il dva Z), (3)
где выражение (2) характеризует значение функции Н(у) при нулевой пространственной частоте.
Выражение (3) характеризует значение функции НО) при фиксированной пространственной частоте
.
7
16015126
Сначала определяют радиус а из графика записанной функции HQ) на основании выражения (3), из которого
5 следует, что при функция
-1() не изменяется, т.е. является постоянной и выходит на прямолинейный
участок в том момент, когда ) - .
10 Л
следовательно, по графику записанной функции Н() определяют частоту на которой И{) становится постоянной, т.е. параллельной оси х, тогда
а
А
W
20
Затем определяют концентрацию частиц путем деления выражения (2) на выражение (3) с последующей подстановкой в получаемое выражение значений Z, - и значений радиуса а частицы
25
dv 1п(
Н(0)
а
А
W
Затем определяют концентрацию частиц путем деления выражения (2) на выражение (3) с последующей подстановкой в получаемое выражение значений Z, - и значений радиуса а частицы
25
dv 1п(
Н(0)
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |
| СПОСОБ ИССЛЕДОВАНИЯ МИКРООБЪЕКТОВ | 1998 |
|
RU2154815C2 |
| АВИАЦИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ УТЕЧЕК ГАЗА ИЗ ТРУБОПРОВОДОВ | 1995 |
|
RU2091759C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА РАДИОСИГНАЛА | 2021 |
|
RU2787952C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 2002 |
|
RU2213982C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| Способ и устройство для Фурье-анализа жидких светопропускающих сред | 2021 |
|
RU2770415C1 |
| СПОСОБ ЭЛЕКТРОННО-ЛУЧЕВОЙ СВАРКИ | 1995 |
|
RU2113954C1 |
| Способ контроля качества оптических систем и устройство для его осуществления | 1985 |
|
SU1276940A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЯ | 2012 |
|
RU2490675C1 |
Способ контроля качества оптических систем, заключающийся в том, что формируют пространственно периодический сигнал нулевой частоты, пропускают его через систему, регистрируют амплитуду сигнала, меняют его частоту до максимальной, регистрируют спектр амплитуд сигналов и определяют качество системы, отличающийся тем, что, с целью контроля также и дисперсных систем, в спектре амплитуд сигналов фиксируют частоту, с которой амплитуда сигнала остается постоянной, и по величине отношения амплитуд сигналов нулевой и фиксированной частот судят о параметрах системы.
30 Таким образом, введение операции
Поскольку величины Z и известны, фиксации частоты, с которой амплитуда сигнала остается постоянной, в совокупности с известной последовательностью операций позволяет использовать способ для контроля дисперса функция НО) записывается на воспроизводящем блоке (не показан), то концентрацию dv и размер частиц с радиусом а определяют следующим образом:
35
ных систем.
фиксации час да сигнала о совокупности тельностью о зовать спос
35
ных систем.
I отн. еЭ
б
7
го
iS
эо
