Изобретение относится к радиотехнике и может быть использовано для определения местоположения источников радиоизлучения в ДКМВ диапазоне при использовании одной приемной станции.
Достижение теоретически предельной точности местоопределения в ДКМВ диапазоне ограничивается существенной априорной неопределенностью относительно параметров среды распространения пространственных радиоволн и несовершенством применяемых способов обработки принимаемых сигналов.
Известен способ однопозиционного определения местоположения ДКМВ передатчиков [1], включающий когерентный прием и синхронную регистрацию сигналов для всех баз, образованных опорной и всеми входящими в решетку антеннами, восстановление на основе зарегистрированных сигналов двумерного комплексного углового спектра, положение максимумов модуля которого отражает азимутальный α и угломестный β пеленги передатчика, и определение наклонной дальности по формуле R=Н/sinβ, где Н - известная высота подъема передатчика.
Данный способ теряет свою работоспособность в случае прихода в точку приема ионосферной волны, так как он обеспечивает определение только наклонной дальности до источника излучения.
Известен способ однопозиционного определения местоположения ДКМВ передатчиков [2]. Согласно этому способу:
1. Принимают решеткой антенн многолучевой сигнал передатчика на заданной частоте.
2. Синхронно преобразуют ансамбль принятых сигналов в цифровые сигналы.
3. Синхронно регистрируют цифровые сигналы на заданном временном интервале.
4. Определяют азимутальное направление α прихода радиоволны по азимутальному сигналу, который имеет составляющую, изменяющуюся по синусоидальному закону при изменении фазы принимаемого сигнала.
5. Измеряют амплитуду m' синусоидальной составляющей.
6. Генерируют амплитуду m, соответствующую амплитуде m' при распространении радиоволны по поверхности Земли.
7. Измеряют угломестный β пеленг принятого радиосигнала по формуле cosβ=m'/m.
8. Определяют дальность до передатчика по формуле
где h - высота ионосферы, r -радиус Земли.
К недостаткам способа-прототипа относится низкая точность определения местоположения, что обусловлено:
- наличием аномальных ошибок измерений азимутального (до 3 градусов) и угломестного (до 30 и более градусов) пеленгов, обусловленных интерференционными биениями сигналов нескольких лучей, возникающих при отражении от ионосферы, с одной стороны, и отсутствием у прототипа разрешающей способности по пространству, с другой;
- наличием аномальных ошибок измерений азимутального пеленга (до 5 градусов) и дальности (до 20%), связанных с наличием наклонов отражающей поверхности (горизонтальных градиентов электронной концентрации ионосферы), приводящих к отклонениям лучевой траектории, как по дальности, так и по направлению, с одной стороны, и отсутствием у прототипа операций коррекции аномальных отклонений, с другой;
- наличием аномальных ошибок однопозиционного измерения дальности (более 100%), связанных с неоднозначностью измерений, обусловленной многоскачковым механизмом распространения пространственных радиоволн вследствие отражения от ионосферы, с одной стороны, и отсутствием у прототипа операций устранения неоднозначности, с другой.
Повышение точности однопозиционного определения местоположения источников радиоизлучения в ДКМВ диапазоне при использовании способа-прототипа можно обеспечить несколькими известными путями [3].
1. Гистограммной обработкой или усреднением результатов измерений для подавления многолучевости и выделения доминирующего луча.
2. Корреляцией смежных по времени результатов измерений, позволяющей отфильтровать аномальные ошибки, обусловленные временной нестационарностью сигнала и шумовыми выбросами.
3. Привлечением дополнительной априорной информации о местонахождении контролируемых передатчиков, например о невозможности размещения передатчика на водной поверхности Земли, для устранения неоднозначности измерений.
Первый путь радикально не решает проблему, так как сохраняет зависимость достижимой точности от числа и параметров лучей падающего поля и требует очень большого времени наблюдения.
Второй путь очень эффективен в однолучевом случае, но при наличии многолучевого сигнала может приводить к грубым ошибкам измерений.
Третий путь может привести к успеху только в отдельных исключительных случаях и, как следствие, мало эффективен на практике.
Техническим результатом изобретения является повышение точности однопозиционного определения местоположения ДКМВ передатчиков.
Повышение точности определения местоположения достигается на основе дополнительной информации, получаемой в результате разделения лучей многолучевого поля принимаемого сигнала и моделирования процесса распространения радиоволн в трехмерно неоднородной ионосфере, что открыло возможность коррекции отклонений лучевых траекторий сигнала по дальности и по направлению путем учета наклонов отражающего слоя ионосферы, а также устранения неоднозначности однопозиционного измерения координат путем сопоставления траекторий выделенных лучей.
Технический результат достигается тем, что в способе однопозиционного определения местоположения ДКМВ передатчиков, включающем прием на заданной частоте многолучевого сигнала передатчика решеткой антенн, синхронное преобразование ансамбля принятых антеннами сигналов в цифровые сигналы и их синхронную регистрацию на заданном временном интервале, согласно изобретению из цифровых сигналов выделяют сигналы отдельных лучей прихода сигнала передатчика и восстанавливают двумерные пеленги каждого луча по известным алгоритмам, формируют модель ионосферы, соответствующую частоте и временному интервалу приема сигнала, и модельные сигналы обратного излучения в измеренных направлениях прихода лучей, определяют траектории обратного многоскачкового распространения модельных сигналов и находят координаты точек их прихода на поверхность Земли, которые идентифицируют как координаты предполагаемых точек излучения сигнала передатчика, находят совпадение полученных точек, совпавшие точки объединяют и находят точку, координаты которой идентифицируют как координаты передатчика.
Операции способа поясняются следующими чертежами.
Фиг.1. - структурная схема устройства определения местоположения ДКМВ передатчиков.
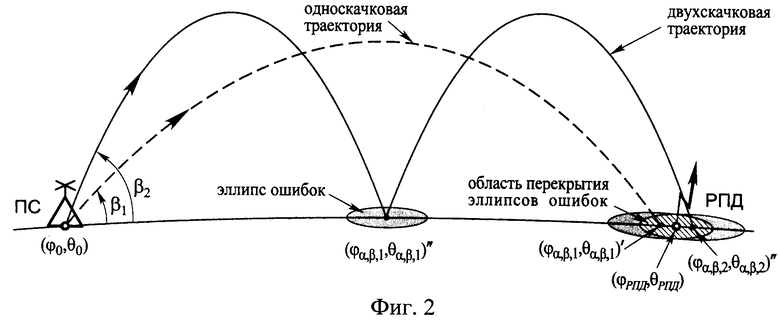
Фиг.2. - схема функционирования системы однопозиционного определения местоположения.
Способ однопозиционного определения местоположения ДКМВ передатчиков осуществляется следующим образом.
1. Принимают на заданной частоте  многолучевый сигнал передатчика решеткой антенн. В результате формируется ансамбль сигналов хn(t), зависящих от времени t, где n=0,...,N - номер антенны.
многолучевый сигнал передатчика решеткой антенн. В результате формируется ансамбль сигналов хn(t), зависящих от времени t, где n=0,...,N - номер антенны.
2. Синхронно преобразуют ансамбль принятых антеннами сигналов xn(t) в цифровые сигналы xn(z), где z - номер временного отсчета сигнала.
3. Синхронно регистрируют цифровые сигналы xn(z) на заданном временном интервале.
4. Из цифровых сигналов xn(z) выделяют сигналы отдельных лучей прихода сигнала передатчика и восстанавливают двумерные пеленги каждого луча (азимут αq и угол места βq, где q=1...Q - текущий номер луча) по известным алгоритмам.
Выделение сигналов отдельных лучей прихода сигнала в точку приема и восстановление двумерных пеленгов каждого луча возможно применением различных алгоритмов [4]. Например, возможно применение алгоритма, разделяющего лучи по доплеровскому смещению частоты. Кроме данного алгоритма, который требует длительных выборок сигнала, могут использоваться алгоритмы, основанные на восстановлении пространственного радиоизображения источника [1], включая алгоритмы с высоким разрешением, обеспечивающие разделение коррелированных сигналов (сигналов-лучей, возникающих при отражении сигнала ДКМВ передатчика от ионосферы) [4]. При этом восстанавливают спектральные плотности  где Ft{...} - оператор дискретного Фурье-преобразования по времени, l - номер частотной дискреты, 1≤l≤L, сигналов xn(z) и формируют амплитудно-фазовое распределение в виде вектора
где Ft{...} - оператор дискретного Фурье-преобразования по времени, l - номер частотной дискреты, 1≤l≤L, сигналов xn(z) и формируют амплитудно-фазовое распределение в виде вектора
где  - спектральная плотность сигнала, измеряемого на опорной антенне решетки с номером n=0, а ()* - означает комплексное сопряжение. Сформированный вектор входных данных
- спектральная плотность сигнала, измеряемого на опорной антенне решетки с номером n=0, а ()* - означает комплексное сопряжение. Сформированный вектор входных данных  используется для итерационной регуляризованной реконструкции угловой зависимости падающего поля в виде комплексного вектора
используется для итерационной регуляризованной реконструкции угловой зависимости падающего поля в виде комплексного вектора  где А - заданная матрица размером N×М, характеризующая возможные направления прихода сигнала от каждого потенциального источника, М - число угловых положений, соответствующих заданным потенциально возможным направлениям прихода сигналов, γ - параметр регуляризации,
где А - заданная матрица размером N×М, характеризующая возможные направления прихода сигнала от каждого потенциального источника, М - число угловых положений, соответствующих заданным потенциально возможным направлениям прихода сигналов, γ - параметр регуляризации,  p=0,1,
p=0,1,  элемент вектора
элемент вектора  ε - малое число.
ε - малое число.
По максимумам восстановленного с высоким разрешением пространственного спектра  определяют ансамбль двумерных пеленгов
определяют ансамбль двумерных пеленгов 
5. Формируют модель ионосферы, соответствующую частоте и временному интервалу приема (время, месяц, год) сигнала передатчика и модельные сигналы обратного излучения в измеренных направлениях  прихода лучей.
прихода лучей.
При формировании модели ионосферы используют Международную справочную модель ионосферы IRI-2001 [5]. В результате вычисляют и запоминают пространственное распределение квадрата отношения плазменной частоты электронов ƒp=ƒр(ϕ, θ, r) в ионосфере к рабочей частоте принимаемого сигнала, которое необходимо для вычисления показателя преломления изотропной плазмы μ=μ(ϕ, θ, r):
Для ускорения процедуры вычислений плазменная частота электронов ƒp в ионосфере прогнозируется на трехмерной пространственной сетке и аппроксимируется кубической сплайн-функцией. Шаг пространственной сетки по координатам на земной поверхности не превышает 500 км, а по вертикальной координате составляет 2,5 км. После процедуры аппроксимации запоминают коэффициенты аппроксимирующей сплайн-функции в узлах пространственной сетки.
Модельный сигнал описывается единичным волновым вектором  и рабочей частотой
и рабочей частотой  Компоненты единичного вектора определяются по измеренному азимутальному α и угломестному β пеленгам луча (здесь и далее для упрощения записи индекс номера луча опущен) и в локальной системе координат (начало координат совпадает с точкой расположения пеленгатора (ϕ0, θ0, r0), ось у направлена на север, ось х - на восток, ось z - вертикально вверх), имеют вид
Компоненты единичного вектора определяются по измеренному азимутальному α и угломестному β пеленгам луча (здесь и далее для упрощения записи индекс номера луча опущен) и в локальной системе координат (начало координат совпадает с точкой расположения пеленгатора (ϕ0, θ0, r0), ось у направлена на север, ось х - на восток, ось z - вертикально вверх), имеют вид  Переход от локальной системы координат к глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан) для компонент вектора осуществляется с помощью матрицы преобразования А:
Переход от локальной системы координат к глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан) для компонент вектора осуществляется с помощью матрицы преобразования А:
где в качестве сферических координат ϕ и θ подставляются координаты пеленгатора ϕ0, θ0.
6. Формируют траектории обратного многоскачкового распространения модельных сигналов каждого луча в ионосфере. Для этого находят начальные значения сферических координат ϕ, θ, r луча, которые полагаются равными координатам точки входа луча в ионосферу ϕ1,θ1 r1, вычисляемым по формулам:

где х1x, х1y, х1z - элементы вектора  декартовых координат точки входа луча в ионосферу:
декартовых координат точки входа луча в ионосферу:  r0 - радиус Земли, h0 - начальная высота ионосферы,
r0 - радиус Земли, h0 - начальная высота ионосферы,  - декартовые координаты точки излучения модельного сигнала с поверхности Земли в глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан). Для первого скачка (i=1) вектор
- декартовые координаты точки излучения модельного сигнала с поверхности Земли в глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан). Для первого скачка (i=1) вектор  вычисляется по координатам пеленгатора:
вычисляется по координатам пеленгатора:

Начальное значение волнового вектора  модельного сигнала на входе в ионосферу определяется по вектору
модельного сигнала на входе в ионосферу определяется по вектору  с использованием унитарной матрицы преобразования В глобальной системы координат к сферической:
с использованием унитарной матрицы преобразования В глобальной системы координат к сферической:
где в качестве сферических координат ϕ и θ подставляются значения ϕ1, θ1.
Для построения лучевой траектории модельного сигнала численно решается задача Коши для системы дифференциальных уравнений:


где kϕ, kθ, kr - значения элементов волнового вектора  модельного сигнала в ионосфере, ϕ, θ, r - координаты луча.
модельного сигнала в ионосфере, ϕ, θ, r - координаты луча.
Находят вектор волновой нормали на выходе из ионосферы  , сферические ϕ2, θ2, r2 и глобальные декартовые координаты точки выхода из
, сферические ϕ2, θ2, r2 и глобальные декартовые координаты точки выхода из  луча модельного сигнала. В качестве значений сферических координат ϕ2, θ2, r2 и волнового вектора выбирается решение задачи Коши, полученное на предыдущем этапе, в точке выхода лучевой траектории из ионосферы.
луча модельного сигнала. В качестве значений сферических координат ϕ2, θ2, r2 и волнового вектора выбирается решение задачи Коши, полученное на предыдущем этапе, в точке выхода лучевой траектории из ионосферы.
7. Находят сферические координаты прихода луча модельного сигнала на поверхность Земли (для первого скачка i=1):
где х3x, x3y, x3z - элементы вектора  декартовых координат точки прихода волны на поверхность Земли в глобальной системе координат:
декартовых координат точки прихода волны на поверхность Земли в глобальной системе координат:

Матрицу В вычисляют в точке с координатами ϕ2, θ2.
Сферические координаты точки прихода последующих скачков лучевой траектории определяют повторением этапов 5-7 с использованием обновленных векторов  и
и  :
:  , где матрица А и компоненты вектора
, где матрица А и компоненты вектора  после отражения от поверхности Земли определяются с использованием координат
после отражения от поверхности Земли определяются с использованием координат  и
и  полученных на предыдущем скачке.
полученных на предыдущем скачке.
Найденные координаты прихода модельных сигналов всех скачков каждого луча идентифицируют как координаты предполагаемых точек излучения сигнала передатчика.
На фиг.2, в качестве примера, показаны односкачковая и двухскачковая траектории распространения модельных сигналов с указанием координат (ϕ0, θ0) точки размещения приемной станции (ПС) и координат точек прихода на поверхность Земли односкачковой  и двухскачковой
и двухскачковой 
 траекторий.
траекторий.
8. Находят совпадение предполагаемых точек излучения.
Для этого сравнивают координаты  полученных точек излучения сигнала, соответствующие различным лучам прихода принятого сигнала, и отбирают точки с совпадающими координатами.
полученных точек излучения сигнала, соответствующие различным лучам прихода принятого сигнала, и отбирают точки с совпадающими координатами.
В примере, приведенном на фиг.2, сравнению подлежат координаты соответствующие лучу с односкачковой траекторией, и координаты соответствующие лучу с двухскачковой траекторией.
9. Совпавшие точки объединяют и находят точку, координаты которой идентифицируют как координаты передатчика.
Сравнение и объединение возможно различными способами [3, стр.297, 298]. Например, фиг.2 иллюстрирует возможность отбора точек по степени перекрытия эллипсов ошибок или по принадлежности точек области перекрытия их эллипсов ошибок. Возможно применение принципа центра масс. Например, для пары точек, идентифицированных как предполагаемые точки излучения, находят точку по принципу центра масс. Если расстояние от центра масс до каждой точки меньше заданного порога, то принимается решение об их совпадении и выборе центра масс в качестве местоположения передатчика. Значение порога выбирается исходя из эксплуатационной точности измерения координат. В результате несколько сопоставляемых точек (в примере на фиг.2 сопоставляются три точки) заменяются одной точкой центра масс.
На фиг.2 показана точка с координатами [ϕРПД, θРПД), которые идентифицированы как координаты передатчика (РПД). При этом использован упомянутый принцип центра масс.
Устройство, в котором реализуется предложенный способ (фиг.1), содержит последовательно соединенные антенную систему 1, многоканальное радиоприемное устройство (РПУ) 2, многоканальный аналого-цифровой преобразователь (АЦП) 3, вычислитель 4, блок моделирования траекторий и оценки координат 5, блок сравнения координат 6, блок управления и индикации 7 и формирователь модели ионосферы 8. Выход формирователя 8 соединен со вторым входом блока 5, а выход блока 7 подключен ко вторым входам устройства 2 и преобразователя 3.
Антенная система 1 содержит опорную антенну с номером n=0 и N антенн с номерами n=1...N, объединенных в решетку.
Многоканальное РПУ 2 выполнено с общим гетеродином и с полосой пропускания каждого канала, соответствующей ширине спектра сигнала передатчика. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов, что является основным условием интерферометрической (голографической) регистрации комплексных сигналов передатчиков.
Кроме этого, РПУ 2 обеспечивает подключение опорной антенны (n=0) вместо всех антенн решетки для периодической калибровки каналов по внешнему источнику сигнала с целью устранения их амплитудно-фазовой неидентичности. Возможна калибровка по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов.
Отметим, что возможен вариант построения многоканального РПУ 2 по принципу приемника прямого усиления. При этом каналы РПУ 2 выполняют функцию фильтрации принимаемого сигнала по частоте и функцию усиления отфильтрованного сигнала до уровня согласованного с входным диапазоном уровней АЦП.
Формирователь модели ионосферы 8 обеспечивает как долгосрочный прогноз параметров ионосферы, так и его корректировку по данным, поступающим от внешних систем вертикального или наклонного зондирования ионосферы.
Блок управления и индикации 7 задает начальные параметры (частота и интервал приема) и синхронизирует работу устройств в режиме калибровки и в основном режиме.
Устройство работает следующим образом.
По сигналу управления от блока 7 производится настройка РПУ 2 на частоту приема  и обеспечивается запуск АЦП 3 и формирователя 8.
и обеспечивается запуск АЦП 3 и формирователя 8.
Многолучевой сигнал передатчика принимается решеткой из N+1 антенн и (N+1)-канальным РПУ 2 на заданной частоте в полосе приема, соответствующей ширине спектра частот принимаемого сигнала. В результате формируется ансамбль сигналов xn(t), зависящих от времени t, где n=0,...,N - номер антенны.
Полученные сигналы хn(t) синхронно преобразуются (N+1)-канальным АЦП 3 в цифровые сигналы xn(z), где z - номер временного отсчета сигнала.
В вычислителе 4 цифровые сигналы xn(z) регистрируются на заданном временном интервале. Из цифровых сигналов xn(z) выделяют сигналы отдельных лучей прихода сигнала передатчика и восстанавливают двумерные пеленги каждого луча (азимут αq и угол места βq, где q=1...Q - текущий номер луча) по известным алгоритмам. На выходе вычислителя 4 формируется ансамбль двумерных пеленгов 
В блоке 5 генерируются модельные сигналы обратного излучения в измеренных направлениях прихода лучей. С использованием модели ионосферы, получаемой в формирователе 8 с привязкой к частоте и времени приема (время, месяц, год), строятся траектории обратного многоскачкового распространения модельных сигналов каждого луча в ионосфере. Кроме того, в блоке 5 определяются сферические координаты прихода модельных сигналов всех скачков каждого луча на поверхность Земли, которые идентифицируются как координаты предполагаемых точек излучения сигнала передатчика.
В блоке 6 сравниваются координаты полученных точек излучения сигнала, соответствующие различным лучам прихода принятого сигнала, и отбираются точки с совпадающими координатами. Совпавшие точки объединяются и находится точка, координаты которой идентифицируются как координаты передатчика. Сравнение и объединение выполняется в соответствии с пунктом 9, приведенным на стр.10 описания.
В блоке 7 для повышения информативности отображается местоположение передатчика на картографическом фоне.
Повышение точности однопозиционного определения местоположения ДКМВ передатчиков достигается за счет дополнительной информации, получаемой в результате разделения многолучевого поля принимаемого сигнала и моделирования процесса распространения радиоволн в трехмерно неоднородной ионосфере.
При этом обеспечивается:
- уменьшение вероятности аномальных ошибок измерений местоположения, обусловленных интерференционными биениями сигналов нескольких лучей;
- устранение аномальных ошибок определения местоположения, вызванных отклонением лучевой траектории, как по дальности, так и по направлению из-за наклонов отражающего слоя ионосферы;
- решение проблемы однозначного определения местоположения ДКМВ передатчиков при использовании только одной приемной станции (пеленгатора-дальномера).
ИСТОЧНИКИ ИНФОРМАЦИИ
1. патент RU №2158002, кл. 7 G 01 S 3/14, 5/04, 2000 г.
2. патент JP №4-29030, кл. G 01 S 3/48, 11/02, 1993 г.
3. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981. - 416 с.
4. Шевченко В.Н. Оценивание углового положения источников когерентных сигналов на основе методов регуляризации // Радиотехника. - 2003. - №9. - С.3-10.
5. Bilitza D. Ionospheric Models for Radio Propagation Studies // The review of radio science 1999-2002/ Ed. W. Ross Stone, IEEE Press. 2002. PP.625-679.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| СПОСОБ ПОИСКА ДЕКАМЕТРОВЫХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2302646C1 |
| СПОСОБ КАЛИБРОВКИ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКИХ СИСТЕМ НА ПОДВИЖНЫХ ПЛАТФОРМАХ | 2005 |
|
RU2284043C1 |
| Способ однопозиционного определения координат источников радиоизлучений коротковолнового диапазона радиоволн при ионосферном распространении | 2019 |
|
RU2713188C1 |
| СПОСОБ КАЛИБРОВКИ ДЕКАМЕТРОВОГО РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2010 |
|
RU2422846C1 |
| СПОСОБ КАЛИБРОВКИ РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2005 |
|
RU2309425C2 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
Изобретение относится к радиотехнике и может быть использовано для определения местоположения источников радиоизлучения в ДКМВ диапазоне при использовании одной приемной станции. Техническим результатом изобретения является повышение точности однопозиционного определения местоположения ДКМВ передатчиков. Повышение точности определения местоположения достигается на основе дополнительной информации, получаемой в результате разделения лучей многолучевого поля принимаемого сигнала и моделирования процесса распространения радиоволн в трехмерно неоднородной ионосфере, что открыло возможность коррекции отклонений лучевых траекторий сигнала по дальности и по направлению путем учета наклонов отражающего слоя ионосферы, а также устранения неоднозначности однопозиционного измерения координат путем сопоставления траекторий выделенных лучей. 2 ил.
Способ однопозиционного определения местоположения декаметровых передатчиков, включающий прием на заданной частоте многолучевого сигнала передатчика решеткой антенн, синхронное преобразование ансамбля принятых антеннами сигналов в цифровые сигналы и их синхронную регистрацию на заданном временном интервале, отличающийся тем, что из цифровых сигналов выделяют сигналы отдельных лучей прихода сигнала передатчика и определяют двумерные пеленги прихода каждого луча, формируют модель ионосферы, соответствующую частоте и временному интервалу приема сигнала, и модельные сигналы обратного излучения в измеренных направлениях прихода лучей в ионосфере, определяют траектории обратного многоскачкового распространения модельных сигналов в ионосфере и находят координаты точек их прихода на поверхность Земли, которые идентифицируют как координаты предполагаемых точек излучения сигнала передатчика, находят совпадение полученных точек, совпавшие точки объединяют и находят точку, координаты которой идентифицируют как координаты передатчика.
| US 5719584 А, 17.02.1998 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
| RU 93030955 А, 27.09.1995 | |||
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ РАДИОИЗЛУЧАТЕЛЕЙ | 1993 |
|
RU2072524C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 1999 |
|
RU2154281C1 |
| US 4641143, 03.02.1987 | |||
| US 4263597, 21.04.1981. | |||

