Изобретение относится к электротехнике , а именно к электроприводам стендов дпя испь1тания под нагрузкой электрических машин, а также редукторов и других вращающихся элементов механических передач.
Цель изобретения - сокращение- времени испытаний путем уменьшения времени перевода агрегата из одного установившегося режима в другой.
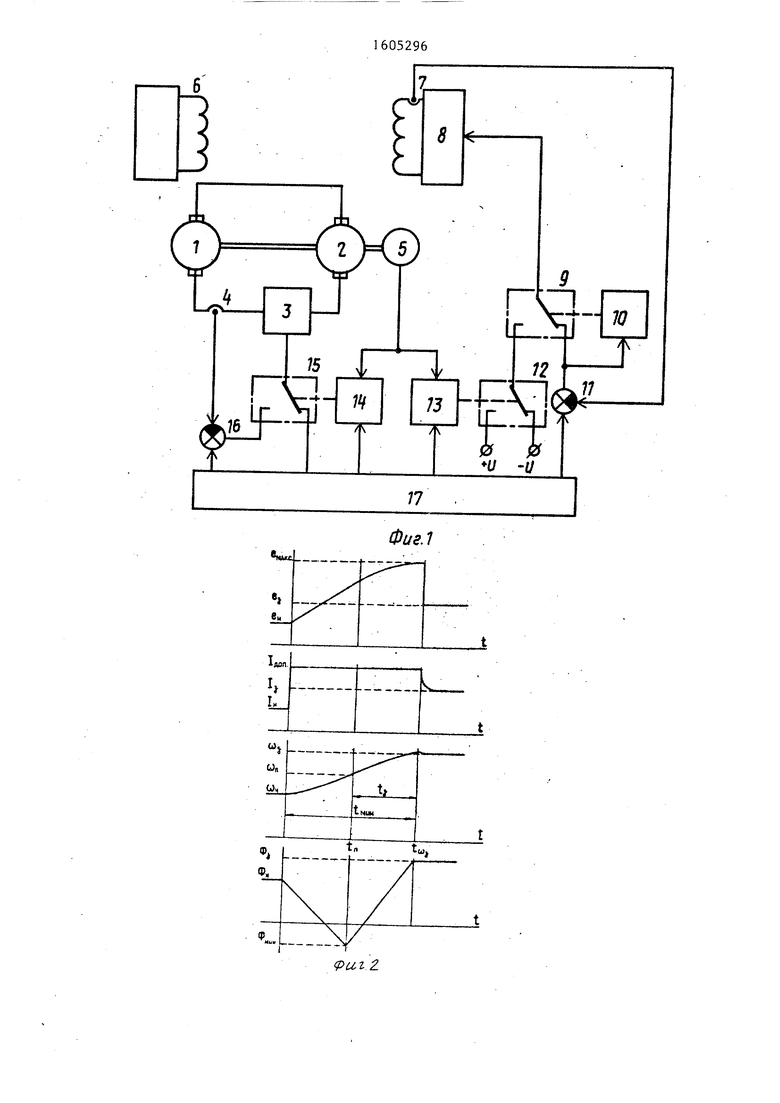
На фиг,1 дана принципиальная схема устройства управления агрегатом взаимной нагрузки; на фиг.2 - графики изменения во времени потока генератора , напряжения источника е, тока агрегата I, скорости агрегата СО при переводе агрегата из исходного
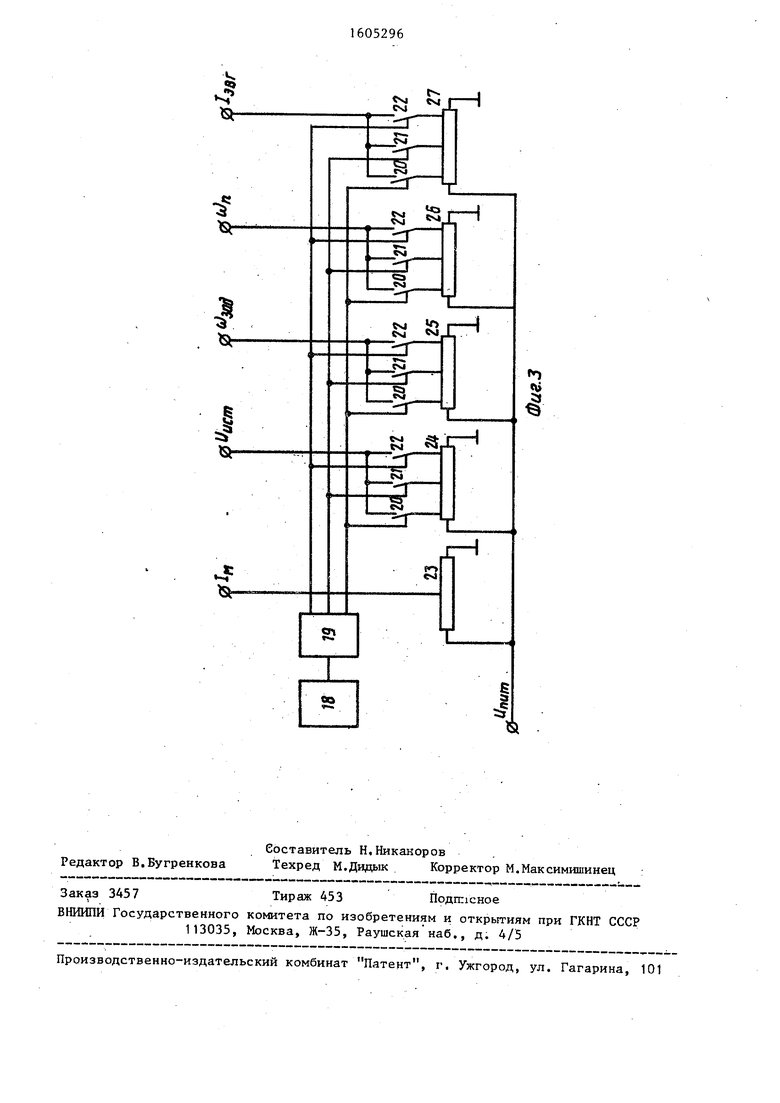
в заданный режим согласно предлагаемому способу; на фиг.З - принципиальная схема nporpaNMHoro блока.
Устройство, реализующее способ управления агрегатом взаимной нагрузки, содержит двигатель и генератор 2, якорные цепи которых соединены последовательно одна с другой и с источником 3 через датчик 4 тока якорей, а валы двигателя 1 и генератора 2 соединены между собой и с датчиком 5 скорости, при-этом обмотка возбуждения двигателя 1 подключена к источнику 6, а обмотка возбуждения генератора 2 через датчик 7 тока возбуждения- к регулятору 8.
СП
ю
)
о:
Вход регулятора 8 соединен с переключающим контактом первого nepeioiK)- чателя 9, управляемого пороговым элементом 10, вход которого соединен с выходом первого сравнивающего элемента 11 к неподвижным контактом первого переключателя 9. Другой неподвижный контакт первого переключателя 9 соединен с перекпючающим контактом вто- рого переключателя 12, управляемого первым компаратором 13. Неподвижные контакты второго переключателя 12 . соединены с разнополярными выходами источника, задающего максимальный по- ложительный и отрицательньш токи возбуждения генератора 8, Первый вход перног.о компаратора 13 соединен с выходом датчика 5 скорости и входом второго компаратора 14, управляющего третьим переключателем 15, переключающий контакт которого соединен с входом источника 3. Один неподвижный контакт третьего переключателя 15 соединён с выходом второго сравниваю- щего элемента 16, вход которого соединен с датчиком 4 тока якорей, а вторые входы второго сравнивающего элемента 165 первого сравнивающего элемента 11, компараторов 13 и 14 и вто- рой неподвижный контакт третьего переключателя 15 соединены с выходами программного блока 17.
П рограммный блок 1 7 задает на своих выходах сигналы, определяющие уровни максимально допустимого тока, напряжения источника 3, тока возбуждения генератора 2, угловой скорости, при которой происходит переключение возбуждения генератора 2 и заданной ско- рости агрегата.
Программный блок 17 содержит генератор 18 тактовых импульсов, распре- дежитель 19 импульсов, ключи 20-22, потенциометры 23-27,
Выход генератора 18 тактовых импульсов соединены с входом распределителя 19 импульсов 5 выходы которого соединены со своими управляющими входами 1слючей 20-22, Ключи 20-22 соеди- нены входами со средними точками свои потенциометров 23-27, а выхода ключей 20-22 объединены и являются выходами блока 17,
Тактовые импульсы генератора 18 преобразуются в сигналы на соответствующих выходах распределителя 19, которые подключают предварительно выставленные по программе точки потениометров 23-27 к выходам программного блока 17 с помощью, своих ключей 20-22.
Устройство работает следующим обазом.
Программный блок 17 задает на своих выходах сигналы, задающие величины максимально допустимого тока 1доп « напряжения источника е., 3, тока возбуждения (потока(рз) генератора 2, скорости переключения СО „ возбуждения генератора 2 и заданной ско- рости 03 агрегата. Эти сигналы заранее выставляются и последовательно переключаются программным блоком 17 в соответствии с программой испытаний на агрегате, В исходном состоянии переключатели 16 и 9 находятся в правом по схеме (фиг.2) положении, что обеспечивает заданный блоком 17 ток возбуждения генератора 2 за счет действия отрицательной обратной связи, осуществляемой датчиком 7 тока и первым сравнивающим элементом 11, и заданную величину напряжения BJ источника 3, которая определена сигналом блока 17, поступающим на правый, контакт третьего переключателя 15,
Скорость агрегата п ри этом соответствует заданной COj на выходе блока 17, соединенном с входом второго ком- паратора 14.
После установления программным блоком 17 новых значений заданных сигналов второй компаратор 14 сравнивает заданный сигнал с сигналом датчика 5 скорости и переключает контакт третьего переключателя 15 в левое положение. Источник 3 будет поддерживать заданный блоком 17 максимально допустимый ток 1доп якорей за счет действия отрицательной обратной связи, осуществляемой датчиком 4 и вторым сравнивающим элементом 16. Первьй компаратор 13 переключает контакт второго переключателя 12 в правое положение, если скорость переключения, заданная-блоком 17, больще скорости агрегата, контролируемой датчиком 5 (если скорость агрегата больще заданной скорости переключения, первый компаратор 13 переключит второй переключатель 12 в левое положение).
Первый переключатель 9 устанавливается в левое положение, поскольку iTopo.roвый элемент 10 реагирует на возникновение больщого рассогласования на выходе первого сравнивающего
5 .16
элемента 1) между сигналами датчика 7 тока и нозым заданным блоком 17 сигналом на выходе первого сравнивающего элемента 1I.
На выходе регулятора 8 появляется максимальный отрицательный сигнал, обеспечивающий наибольшую, скорость спадания тока возбуждения- генератора 2, Агрегат разгоняется с наибЬльп1ей возможной скоростью.
Когда величина скорости превысит заданную блоком 17 скорость переключения Йп первый компаратор 13 пере- .ключит, второй переключатель 12 в ле- вое положение и ток возбуждения начнет расти с наибольшой скоростью, определенной максимальным сигналом на выходе регулятора 8. При достижении тока (потока) возбуждения, равного 3аданному Ф3 пороговый элемент 10 переключит первый переключатель 9 в правое положение и обеспечит требуемый ток возбуждения. При достижении скоростью заданного значения 9г вто- рой компаратор 14 переключит третий переключатель 15 в правое положение и обеспечит заданное напряжение источника 3. Агрегат перейдет в новый заданный режим. При установлении
программным блоком 17 нового режима работы устройства аналогична описанному вьше.
При анализе способа для упрощения примем, что скорость изменения тока возбуждения генератора 3 постоянна, что допустимо при достаточном запасе по напряжению регулятора 8 возбуждения генератора, 1 цг, - максимальное напряжение регулятора возбуждения много больше падения напряжения на обмотке возбуждения от тока возбужде-
Момент переключения tj, следует выбрать таким образом, чтобы к моменту достижения скорости СО ток возбуждения принял требуемое значение Isj т.е. чтобы требуемые значения скорости и тока достигались одновременно. Интегрируя уравнение движения на участках до и после переключения, получим после преобразованияСОп 0,5 (СОц- +0з).
35
Фор мул
изобретения
ния I., т.е.
diB
L
L - индуктивность обмотки возбуждения генератора, (в - постоянная величина:
.
Запишем уравнение движения агрегата
-f- «,
- М - М
о
где I - момент инерции агрегата; М., электромагнитшле моменты
OTBei стБ.нно двигателя и
нератора;
1. Способ управления при испытаниях агрегатом взаимной нагрузки, со- 40 держащим машины постоянного тока с последовательным соединением якорей машин и источника, в котором при разгоне агрегата уменьшают ток возбужде- ния генератора от номинального и ре- т 45 гулируют напряжение последовательно
включенного источника и ток возбуждения и тем самым устана-вливают заданный режим нагрузки,отличающийся тем, что, с целью сокращения времени испыта- 50 НИИ путем уменьшения времени перевода агрегата из одного установившегося режима в другой, при торможении генератора увеличивают его ток возбуждения от номинального значения, а при 55 переводе агрегата из одного установившегося режима в другой стабилизируют ток якоргя на уровне, превьштаю- щем номинальное значение, изменяя напряжение источника, при этом измеряют
соге.
6
Мр - момент, определенный механи- чecки iи потерями мощности в агрегате.
Считаем, что в переходных режимах поддерживается максимальный тек якорей 1д, а следовательно, максимальный момент Мд. Примем также М kig, гд е k cl,oi;
j r V
коэффициент пропорциональности между током и потоком генератора.
При разгоне агрегата от скорости COj до скорости СО 3 вначале уменьшают ток (поток) возбуждения генератора IB IBH yt, затем увеличивают - -в 8П +4 t начиная со скорости Wn яе БН токи возбуждения, соответствующие началу разгона и моменту переключения, Сх)ц скоростьi при которой происходи
переключение.
Момент переключения tj, следует выбрать таким образом, чтобы к моменту достижения скорости СО ток возбуждения принял требуемое значение Isj т.е. чтобы требуемые значения скорости и тока достигались одновременно. Интегрируя уравнение движения на участках до и после переключения, получим после преобразованияСОп 0,5 (СОц- +0з).
35
Фор мул
изобретения
соге.
частоту вращения агрегата и при до- дтижении ее значения, равного полусумме начального и заданного значений частоты вращения, изменяют знак производной тока возбуждения генератора, а при достижении заданной частоты вращения устанавливают номинальное значение напряжения источника,
2 . У стр ой от в о у пр авл ения при и с пы- таниях агрегатом взаимной нагрузки машин постоянного тока, содержащее источники питания якорных цепей и об- моток возбуждения, предназначенные дпя подключения к якорным цепям и об- моткам возбуждения испытуемых машин., снабженные регуляторами датчики то KOBj напряжений и частоты вращения агрегата, блоки коммутацииj отличающееся уем, что, с uejjbra сокращения времени испытаний, снабжено тремя переключателями с двумя неподвижными и одним подвижным контактом и цепями управления, двумя компа- ра.тора ми и пор.оговым элементом, уп 1 авляющш.и переключателями, источником сигнала уставки регулятора воз- б.ух ;де1шя генератора, двумя сравкиваю- щимн элементами, программным блоком с пятью выходами соответствеьшо с за- даншями зна 1ения и тока якоря, напряжения источника питания, частоты вращения,.частоты переключения и тока возбуждения генератора, при этом первый выход программного блока сое- динен с суг-п-трующим, а выход датчика тока -- с вычитающим входами второго сравнивающего элемента, выход которого соединен с первым неподвижным контактом третьего переключателя, другой неподвижный контакт которого соединен с вторым выходом nporpar-iMHoro блока, при этом управляющий вход источ1Щ1ка питания якорных.цепей соединен с под- вижнь1м контактом третьего переключа- теля, управляющие,цепи которого под- ключе-ны к выходу второго компаратора
которого соединены с датчиком частоты вращения и третьим выходом программного блока, первый компаратор своими входами подключен к датчику частоты вращения и четвертому выходу программного блока, а выходом - к уп- равляюисим цепям второго переключателя, неподвижные контакты которого соединены с разнополярными зажимами источника сигнала уставки регулятора зозбу7кдения генератора, а переключающий контакт - с неподвижным контактом первого переключателя, другой непод- вижньй контакт которого соединен с выходом первого срав1швающего элемента и входом порогового элемента, выход которого соединен с управляющими цепями первого переключателя, под- вихсг-ИзШ контакт которого соединен с входом регулятора возбуждения генератора, при этом пятый выход программного блока соединен с суммируюшим входом первого сравнивающего элемента, вычитаю1ций вход которого подключен к выходу датчика тока возбуждения . генератора,
Зе Устройство по п. 2, о т л и - ч а ю-щ е е с я тем, что программный блок снабжен генератором тактовых импульсов, распределителем импульсоз четырьма ключевыми элементамиj пятью потенциометрами, при этом генератор тактовых импульсов и распределитель импульсов соединены последовательно, а выхода распределителя импульсов соединены с управляющими входами ключевых элементов, одни выходы которых соединены со средними точками второго, третьего, четвертого и пятого, по тенциометров, а другие выхор ; представляют собой соответствующие.выходы программного блока-, при этом первый выход программного блока соединен со средней точкой первого потенциометра непосредственно.
ФигЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ НАПРЯЖЕНИЯ, ПРОГРАММИРОВАНИЯ И РАСПРЕДЕЛЕНИЯ АКТИВНОЙ НАГРУЗКИ МЕЖДУ РАЗНОТИПНЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ СУДНА | 2019 |
|
RU2753704C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА С НЕЗАВИСИМЫМ ВОЗБУЖДЕНИЕМ ПОД НАГРУЗКОЙ | 1991 |
|
RU2014627C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИНХРОННЫМ ДИЗЕЛЬ-ГЕНЕРАТОРОМ | 2011 |
|
RU2488708C2 |
| Электропривод бурового станка | 1990 |
|
SU1716065A2 |
| Устройство управления электроприводом обжимного реверсивного прокатного стана | 1976 |
|
SU671890A1 |
| Устройство для управления транспортным средством | 1986 |
|
SU1402452A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Агрегат бесперебойного электроснабжения | 1990 |
|
SU1739439A1 |
Изобретение относится к электротехнике. Цель изобретения - сокращение времени испытаний путем уменьшения времени перевода агрегата из одного установившегося режима в другой. Способ управления агрегатом взаимной нагрузки состоит в том, что при разгоне или торможении агрегата соответственно уменьшают или увеличивают ток возбуждения генератора от номинального значения. В процессе перевода агрегата из одного установившегося режима в другой стабилизируют ток якоря на уровне, превышающем номинальное значение, изменяя напряжения источника. При этом измеряют частоту вращения и при достижении его среднего значения, равного полусумме начального и заданного значений частоты вращения, изменяют знак производной тока возбуждения генератора. При достижении заданной частоты вращения устанавливают номинальное значение напряжения источника питания. Приведена принципиальная схема устройства для реализации способа. 3 з.п. ф-лы, 3 ил.
1дап I|
L
риг Z
«:
и йгН
1
Сч|
«м
дгн
и
51
| Жерве Г.К | |||
| Промьшленные испытания электрических машин | |||
| - Л.: Энер- гоатомиздат, 1984, с.93. |
