IX Изобретемте относится к приборо- строению и может использоваться в уст- ройствах управления весодозирующей аппаратуры.
Цель изобретения - повьпиение производительности процесса весового дозирования за счет сокращет-шя времени поиска оптимального набора весовых
орций составляющих в сумме заданую весовую дозуо
На фиго 1 представлена структурная хема предлагаемого устройства; на ИГ, 2-6 примеры выполнения схем его тдельных элементов
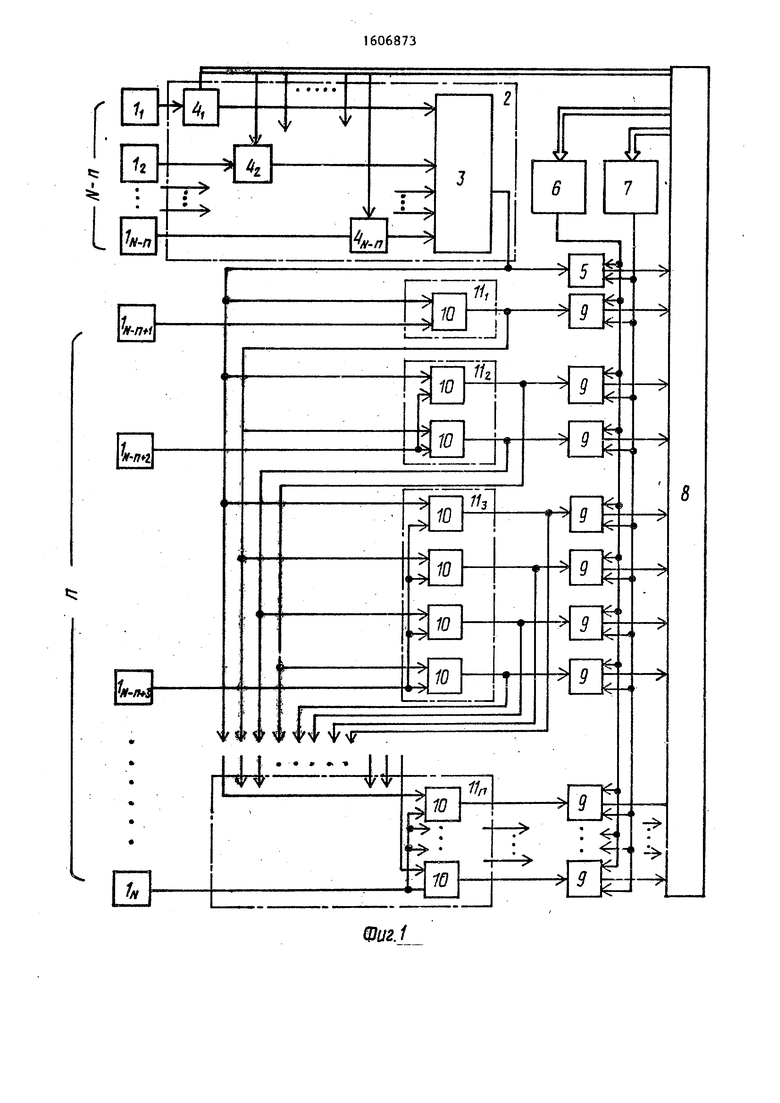
Устройство (фиТоО содержит N дат- Гиков 1, (N-n) из которых подключены к сигнальным входам комбинационного ю сумматора 2, состоящего из многовхо- ового сумматора 3 и подключенных к его входам коммутаторов А, сигнальные и управляющие входа которых и выход сумматора 3, являются соответствую- 5 щими входами и.выходом комбинационного сумматорао Устройство содержит также блок 5 допускового контроля, к первому, второму и третьему входам которого подключены соответственно 20 выход комбинационного сумматора 2 и выходы формирователя 6 нижнего и формирователя 7 верхнего допусковых уровней, входы этих формирователей подсоединены к выходам блока 8 управ- 25 ления, выходы которого и его вход связаны соответственно, с управляющими входами и с выходом комбинационного сумматора 2 о
В состав устройства входят также зо () дополнительных блоков 9 допускового контроля и () двухвходовых сумматоров 10, объединенных в п групп П., каждая из которых содержит 2 этих сумматоров, где i - номер 5 группы (,,..,п), и имеет один общий вход, соединенный с первыми входами всех сумматоров данной группы и подключенный к вькоду одного из п датчиков, не связанных с комби- до национным сумматором 2
50
Остальные 2 входов данной г-й группы, которыми являются вторые входы входящих в нее двухвходовых д сумматоров 10, выход каждого из которых является выходом группы и подключен к первому входу соответствующего
дополйительного блока 9 допускового контроля, соединены с выходом комбинационного сумматора 2 и с выходами всех предыдущих (i-1) групп По Все вторые и все третьи входы блоков 9 соединены с выходами соответственно
, формирователя 6 нижнего и формирова теля 7 верхнего допусковых уровней, ;а выходы этих блоков 9 допускового контроля подключены к входам блока 8
.управления
55
о
0
5
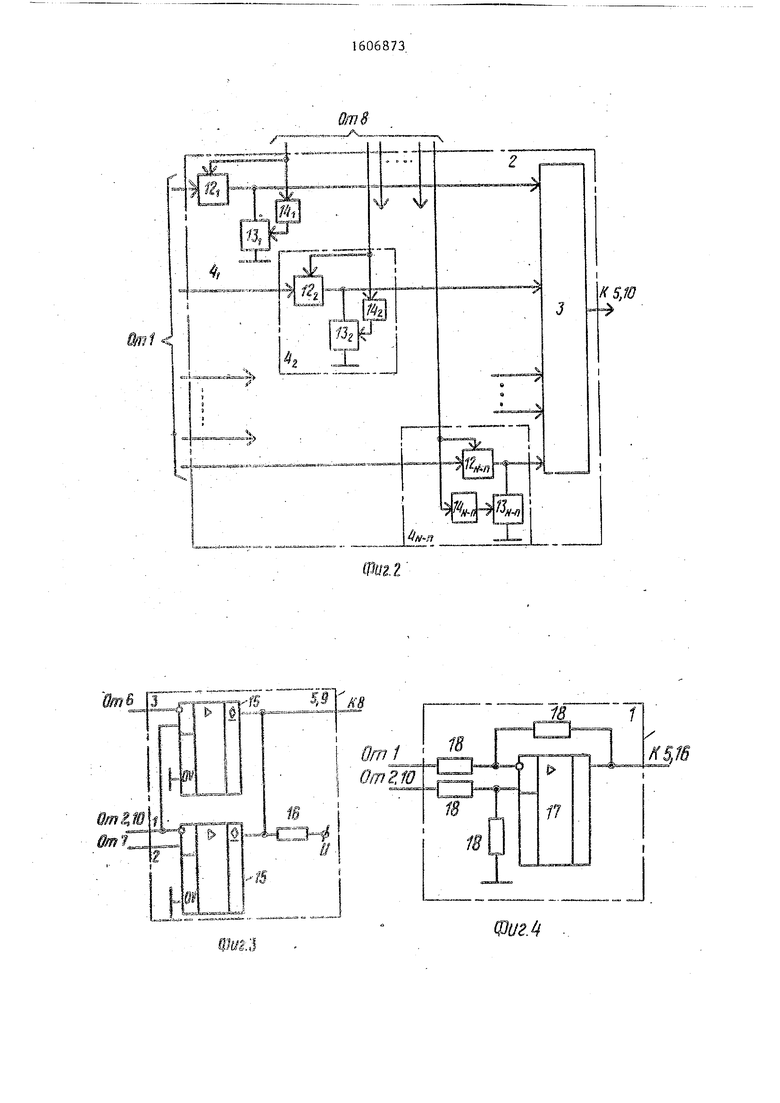
Комбинационный сумматор 2 CФиг.2 содержит коммутаторы 4, каждай из которых состоит из соединенных выхо- дами, подключенными к входам много- входовогв сумматора 3, основного 12 и дополнительного 13 коммутаторов, причем сигнальный вход последнего подключен к общей шине (не показана), а его управляющий вход соединен через инвертор 14 с управляющим входом основного коммутатора 12, сигнальный и управляющий входы которого являются сигнальным и управляющим входами комбинационного сумматора 2, выходом которого служит выход много- входового сумматора 3.
Блок 5 и дополнительные блоки 9 допускового контроля выполнены по идентичной схеме (фигоЗ) и содержат по два компаратора 15 и нагрузочный резистор 16, подключенный к источнику питающего напряжения U,Выходной сигнал, соответствующий уровню 1, появляется на выходе этого блока только тогда, когда напряжение на его. первом входе 1 меньше напряжения на втором входе 2, но больше, чем на третьем входе 3,,
Двухвходовой сумматор 10 может быть выполнен (фиго4) на операционном усилителе 17 и четырех одинаковых резисторах 18
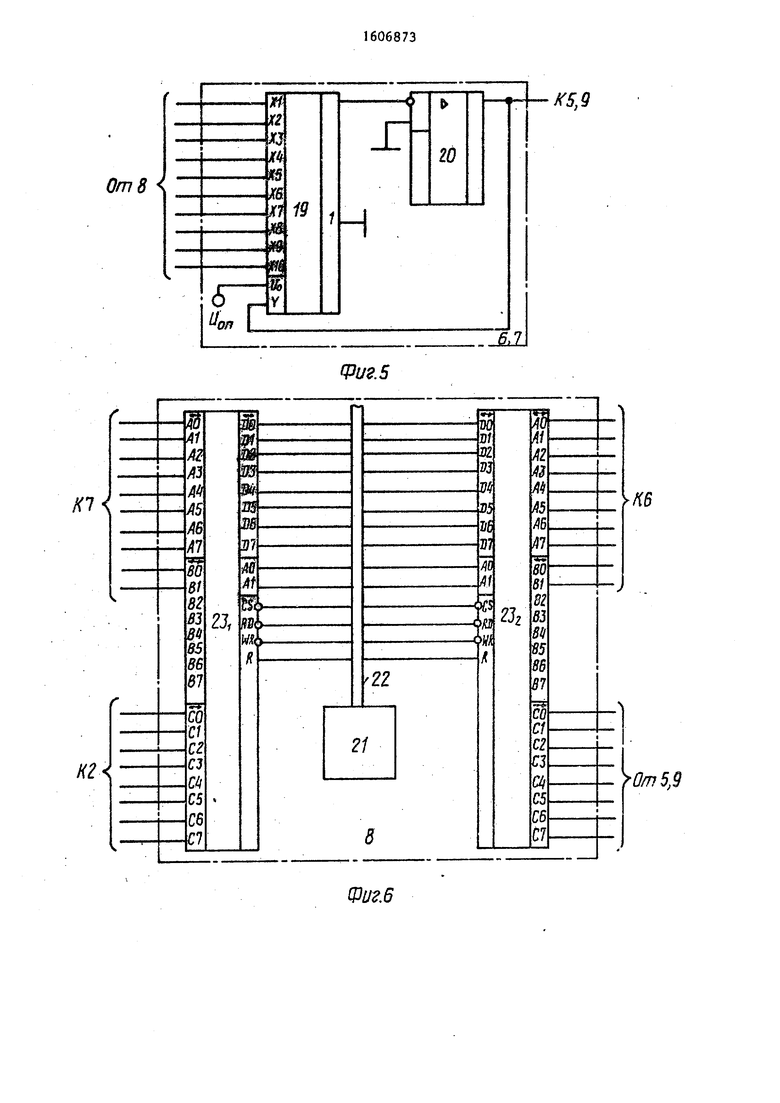
На фиг,5 приведен пример выполнения схемы формирователей-6 и 7 нижнего и верхнего допусковых уровней, на основе цифроаналогового преобразователя (ЦАП).19, информационными входами соединенного с соответствующими выходами блока 8 управления, и операционного усилителя 20„ На вход ЦАП 19 подается также соответствующее опорное напряжение и в зависимости от кода, поступающего на информационные входы ЦАП с блока управле- ния, на выходе ЦАП устанавливается .. напряжение, пропорциональное этому коду и соответствующее заданному до- пусковому уровню.
Блок 8 управления (фиг„6) может- LoiTb выполнен на основе микроЭВМ 21 с шиной интерфейса 22 и двух пери-- ферийных программируемых адаптеров 23.
Предлагаемое устройство работает
следующим образомо
Каждый из N датчиков 1 преобразует контролируемый параметр - вес порции товара на взвешивающем устройстве (не показано) в электрический сигнал Эти сигналы поступают с (N-n) ja,aT4HKOB на комбинационный сумматор 2, в котором они проходят на много- входовой сумматор 3 через коммутаторы 4, а сигналы с остальных п датчиков 1 поступают непосредственно на общие входы п групп 11, образованных двухвходоБыми сумматорами 10 Блок 8 управления вырабатывает последовательности управляющих сигналов в двоичном коде, поступающие на-входы управления коммутаторов,4, которые подключают соответствующее число дад чиков к входам с.умматора 3, сигнал с его выхода сравнивается в блоке 5 допускового контроля с сигналами нижнего и верхнего допусковых уровней, сформированными по сигналам блока 8 управления в формирователях 6 и 7.,
В случае нахождения контролируемого сигнала в заданных пределах поиск останавливается либо блок управления формирует следующую последовательность управляющего сигнала, и поиск
продолжается,
I
Так как количество датчиков 1, подключенных в данный момент к много- входовому сумматору 3 через коммутаторы 4, может изменяться в процессе поиска, будет изменяться и режим ра- ,боты по входам сумматора 3, которые оказываются либо замкнутыми на общую шину через малое вн/утреннее сопротивление источников сигнала (датчиков 1), либо подключенными к ней через большое сопротивление коммутаторов 4 в отключенном (разомкнутом) состоянии, что вызывает дополнительные погрешности в работе комбинационного сумматора 2, вызванные изменением его входного тока,
В предлагаемом устройстве режим
.работы по входам комбинационного сумматора 2 (фиг,2) не изменяется при любом числе включенных датчиков 1, так как входы сумматора 3 фактически всегда подключены к общей щине либо через включенный основной коммутатор 12 н малое выходное сопротивление |Датчика, либо через малое сопротив: ле1-ше включенного дополнительного
реключениях сначала отключался ранее замкнутьй коммутатор, а затем включа ся ранее разомкнутый. Таким условиям
, .удовлетворяют, например, коммутаторы выполненные на аналоговых мультиплек сорах .типа К564, КП1, у которых вре мя включения ключа превышает время его выключения. Таким образом, выпол
10 нение комбинационного сумматора 2 И коммутаторов 4 по схеме фиг,2, состоящих из двух коммутаторов 12 и 13, управляющие сигналы на которые посту пают с блока 8 управления в противо15 фазе с помощью инвертора 14, повышает точность работы этого сумматора и в конечном счете, точность дозирования.
Поиск заданной весовой дозы в ве содозирующих устройствах комбинацион ного -типа является поиском сочетания ич m физических параметров, вхо дящих в набор из N этих параметров (N.m) и представляющих собой, напри25 мер, отдельные веса порций ,. „,оХ , оптимального по некоторому критерию,;задаваемому многоместной целевой функцией F(X,X ,Х.,.,. ,Xj
ТВ
. Хц для удовлетворения неравенст .ui m
ву S-fiS-i X,, где S - заданный суммарный параметр, а ДЗ - его допус тимые отклонения, т,е, комбинационный сумматор 2 является устройством
35 вычисления целевой функции
В весодозирующих устройствах комбинационного типа количество возмож- ных сочетаний С, как функции числа т, имеет максимум ™MCIKC
40 N - четном числе, или ш(,,кс Н/2+0,5 при N - нечетном. Поэтому дня увеличения вероятности нахождения удачной комбинации отдельные взвешивающие устройства загружаются так, что45 бы необходимый суммарный вес дозы получался в результате суммирования числа га отдельных порций при га равным или близким к значению Случаи нахождения удачной комбинации при п сильно, отличающихся от встречаются очень .
В предлагаемом устройстве в отли чие от устройства-прототипа оптимал ные комбинации могут получаться как
SQ
коммутатора 18, подключенного к общей 55 из наборов отдельных весовых порций шине. Чтобы коммутаторы 12 и 13 не на части взвепшвающих устройств,.
(N-n)
Ьказались замкнутыми одновременно;- и не возник режим короткого замыкания датчиков 1 необходимо, чтобы при пег
Тов. из сигналов части (N-n) датчиков 1, преобразующих вес порции в электрический сигнал, и подключенны
реключениях сначала отключался ранее замкнутьй коммутатор, а затем включался ранее разомкнутый. Таким условиям
, .удовлетворяют, например, коммутаторы, выполненные на аналоговых мультиплексорах .типа К564, КП1, у которых время включения ключа превышает время его выключения. Таким образом, выпол0 нение комбинационного сумматора 2 И коммутаторов 4 по схеме фиг,2, состоящих из двух коммутаторов 12 и 13, управляющие сигналы на которые поступают с блока 8 управления в противо5 фазе с помощью инвертора 14, повышает точность работы этого сумматора и, в конечном счете, точность дозирования.
Поиск заданной весовой дозы в ве содозирующих устройствах комбинационного -типа является поиском сочетания ич m физических параметров, входящих в набор из N этих параметров (N.m) и представляющих собой, напри25 мер, отдельные веса порций ,., „,оХ , оптимального по некоторому критерию,;задаваемому многоместной целевой функцией F(X,X ,Х.,.,. ,Xj
ТВ
. Хц для удовлетворения неравенст .ui m
ву S-fiS-i X,, где S - заданный суммарный параметр, а ДЗ - его допустимые отклонения, т,е, комбинационный сумматор 2 является устройством
35 вычисления целевой функции
В весодозирующих устройствах комбинационного типа количество возмож- ных сочетаний С, как функции числа т, имеет максимум ™MCIKC
40 N - четном числе, или ш(,,кс Н/2+0,5 при N - нечетном. Поэтому дня увеличения вероятности нахождения удачной комбинации отдельные взвешивающие устройства загружаются так, что45 бы необходимый суммарный вес дозы получался в результате суммирования числа га отдельных порций при га равным или близким к значению . Случаи нахождения удачной комбинации при п сильно, отличающихся от встречаются очень .
В предлагаемом устройстве в отличие от устройства-прототипа оптимальные комбинации могут получаться как
SQ
55 из наборов отдельных весовых порций на части взвепшвающих устройств,.
(N-n)
Тов. из сигналов части (N-n) датчиков 1, преобразующих вес порции в электрический сигнал, и подключенных
к устройству .вычисления целевой т.- функции - комбинационному сумматору 2, так и из наборов отдельных весовых порций остальных взвешиваю- щих устройств, датчики 1 которых не связаны с комбинационным сумматором 2, а подключены через общие входы п групп двухвходовых сумматоров 10 к дополнительным блокам 9 допус- кового контроля, выходы которых подключены к ,блов;у 8 управления.
Таким образом, увеличивается вероятность получения заданной весовой дозы при меньшем количестве отдель- нык весовых порций (т.е. при меньшем значении щ), составляющих в сумме .заданную весовую дозу, что сокращает время поиска оптимального набора этих порций и повышает произ во- дительность процессе весового дозирования и его большую точность,
Ф .ормула изобре.тения
1 о Устройство управления процессом весового дозирования, содержащее N датчиков и блок управления, выхо- дами подключенные соответственно к ,сигнальным и управляющим входам ком- бинационного сумматора, состоящего из коммутаторов и многовходного сум- 1матора, причем сих нальные я управляющие входы коммутаторов, выходами связанных с входами многовходового Юумматора, и выход этого сумматора являются соответственно сигнальными 1И управляющими входами и выходом комбинационного сумматора, сЬормнрова тели верхнего и нижнего допусковых уровней, входами соединенные с выходами блока управления, и блок допус- кового контроля, выход которого подключен к входу блока управления, а первый, второй и третий входы которо связаны соответственно с выходом комбинационного сумматора, -выходом фор- миров.ателя нижнего и выходом форг-ш- рователя верхнего допусковых уровней отличающееся тем, что, с целью повыщения производктапьности процесса весового дозирования за сче
сокращения времени поиска оптимального набора весовых порций, составляющих в сумме заданную весовую дозу, в него введено дополнительных блоков допускового контроля и двухвходовых сумматоров, объединенных в ,п групп, каждая из которых содержит этих сумматоров, где i-номер группы, (,2,.,,,п), один общий вход, соединенный с первыми входами всех сумматоров данной группы, и последующих входов группы, которыми являются вторые входы входящих в нее двухвходовых сумматоров, выход каждого из которых является выходом группы и подключен к первому входу соответствующего дополнительного блока допускового контроля, а все вторые и все третьи -входы этих блоков соединеш) с выходом формирователя нижнего допускового уровня и с выходом формирователя верхнего допускового уровня соответственно, а выходы этих блоков - с входами блока управления, при этом к сигнальным входам комбинационного сумматора подключено только N-n датчиков, а каждый из остальных п датчиков подсоединен к общему входу соответству1 щей i-й группы двухвходовых сумматоров, а к осталь- ным входам каждой группы подключены- выход комбинационного су-мма- тора и выходы всех предыдущих i-1 групп двухвходовых сумматоров о
2, Устройство по По 1, о т л и- чающееся тем, что, с Целью повьш1ения точности его работы, в комбинационном сумматоре каждый коммутатор состоит из соединенных выходами основного и дополнительного коммутаторов, время включения каждого из которых превьшает время их отключения, причем сигнальный вход дополнительного коммутатора подключен к общей шине, а его управляющий вход соединен через инвертор с управляющим входом основного коммутатора, сигнальный и управляющий входы которого являются сигнальным и управляющими входами комбинационного сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический комбинационный весовой дозатор | 1988 |
|
SU1654674A1 |
| РАДИОЛУЧЕВОЙ ДАТЧИК ОХРАНЫ | 1992 |
|
RU2079889C1 |
| Устройство для весового дозирования кусковых ферромагнитных материалов | 1988 |
|
SU1606875A1 |
| Комбинационный весовой дозатор | 1991 |
|
SU1807317A1 |
| Устройство управления весовым порционным дозатором | 1990 |
|
SU1783484A1 |
| Анализатор для виброакустической диагностики вращающихся деталей | 1987 |
|
SU1483282A1 |
| Многоканальное устройство для контроля параметров | 1978 |
|
SU911539A2 |
| Устройство для автовыбора каналов при разнесенном приеме | 1979 |
|
SU879795A1 |
| Весы с автоматическим изменением диапазонов | 1989 |
|
SU1793260A1 |
| Автоматический комбинационный дозатор | 2023 |
|
RU2814509C1 |
Изобретение относится к приборостроению и может использоваться в устройствах управления весодозирующей аппаратуры. Цель изобретения - повышение производительности процесса весового дозирования за счет сокращения времени поиска оптимального набора весовых порций, составляющих в сумме заданную весовую дозу. В устройстве к входам блока вычисления целевой функции - комбинационному сумматору - из N датчиков, вырабатывающих электрические сигналы, пропорциональные весу порции товара на данном взвешивающем устройстве, подключена только часть, а именно N-N датчиков, а остальные N датчиков подключены к общим входам групп, образованных двухвходовыми сумматорами, при этом каждая группа N содержит 2I-1 сумматоров, при их общем числе 2N-1, выходы этих сумматоров подключены к первым входам 2N-1 дополнительных блоков допускового контроля. Коммутатор в комбинационном сумматоре 2 выполнен состоящим из основного и дополнительного коммутаторов, их управляющие входы связаны через инвертор и управляющие сигналы с блока управления поступают на эти коммутаторы в противофазе. Время включения обоих коммутаторов превышает время их отключения. При таком выполнении комбинационного сумматора сохраняется неизмененным его режим работы по входам, независимо от числа включенных датчиков, что повышает точность вычисления целевой функции. Так как в устройстве оптимальные комбинации могут формироваться как из наборов N-N датчиков, подключенных к сумматору, так из наборов остальных датчиков, не связанных с этим сумматоров, увеличивается вероятность получения заданной весовой дозы при меньшем количестве отдельных весовых порций, что сокращает время поиска оптимального набора этих порций, составляющих в сумме заданную весовую дозу, и тем самым повышается производительность процесса весового дозирования. 1 з.п. ф-лы, 6 ил.
(PU2.1
MS,10
ФиН
Фиг.
OmS
ipus.S
KB
| Патент США № 4470166, кло G 01 G 13/00, опублик, 1984 |
