Изобретение, относится к весоизме зй- тельной технике и может быть использовано в литейном производстве, и tiepHoft металлургии, преимущественно в системах дозировавши и подачи шикты в плавильные агрегаты.
Цель изобретения - повышение точ-- ности и экономичности.
На фиг.1 схематично показан.сек- ционный электромагнитный схват; на (фиг,2 - функциональнаясхема управ- зэёния весодозирующим устройством; на ;фиг.З - функциональная схема блока -иоиска; на фиг.4 - алгоритм работы
.блока поиска.
Сейщонный электромагнитный схват
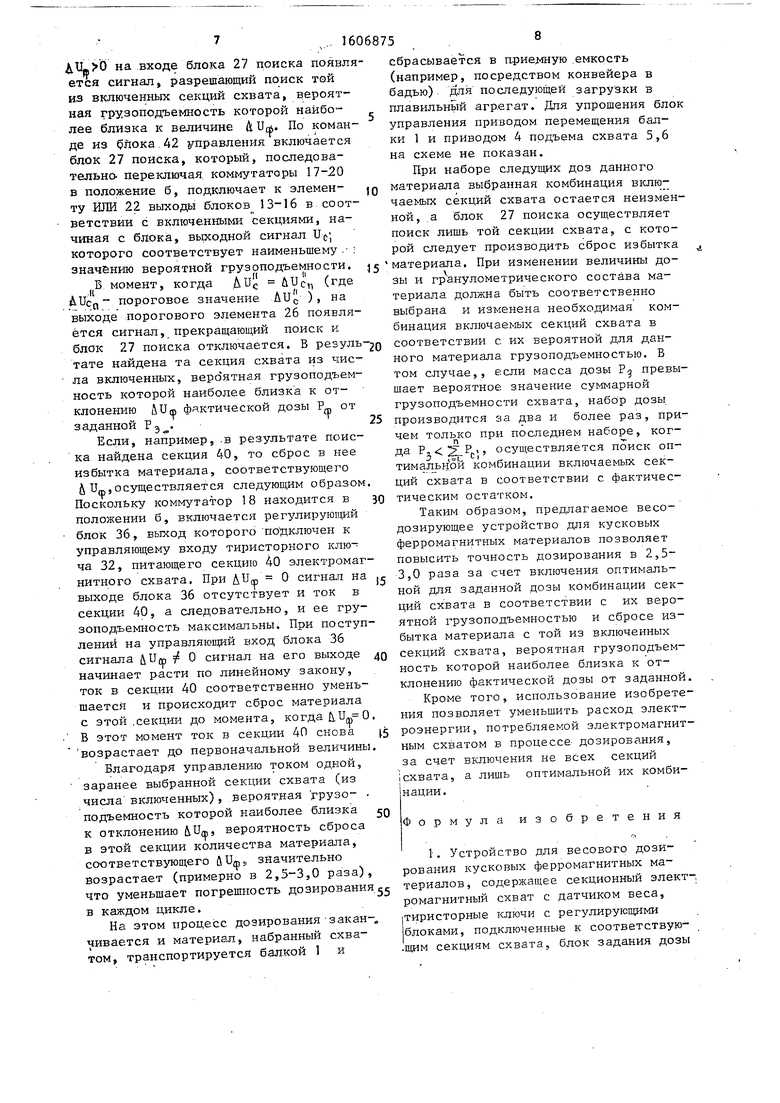
(фиг.1) состоит из балки 1 с приводом (не показан), двух подъемных уст- . ройств 2 и 3 с общим приводом 4 сплошного 5 и. секционного б электромагнитов, причем расчетная грузоподъемность сплошного электромагнита 5 и суммарная расчетная грузоподъемность секционного лзле1стромагнита 6 равны.,, Закром 7 разделен перегородкой 8 на две части. В одной части размещена крупная фракция 9, а в другой части мелкая фракция 10 дозируемого ферромагнитного материала. Др1Я .измерения. массы материала, набранного схватом, использованы силоизмерительные датчики 1I и 12 (например, тензорезистор : ные),включенные последовательно. Схема, приведенная на фиг., пред- ставляет собой весодозирующий модуль, являющийся основой для построения автоматических линий дозир ования ферромагнитных материалов и, в частное- ти,ферромагнитных компонентов шихты, загружаемых в плавильные агрегаты. Функциональная схема весодозирую- щего устройства (фиг.2) содержит блоки 13-16 задания вероятных значе. НИИ грузоподъемности Р.
Р ,Р(. секций захвата, спаренные коммутаторы 17-20, сумматор 21, элемент FJli 22, компараторы 23 и 24, электрошшй, ключ 25, пороговый элемент 26, блок 27 поиска, блок 28 за- Дания дозы, датчик 29 веса, тиристор ные ключи 30-33i регулирующие устроства 34-37 тиристорных ключей 30-33 .соответственно, выполненные, наприме в виде генераторов линейно изменяюще гося напряжения во времени при нагаи- чии сигнала на входе, секции 38-41 различной грузоподъемности, входящие в состав электромагнитного схвата.
лок 42 управления. Выходы блоков 13-16 соответственно соединены с суматором 21 и элементом ИЛИ 22. Входы омпаратора 23 подключены к выходам сумматора 21 и блока 28 задания дозы. ходы компаратора 24 подключены к ыходам элемента ИЛИ, блока 28 задаия дозы и датчика 29 веса, в состав которого входят датчики 11 и 12. Входы компараторов 23 и 24 через ключ 25 и пороговый элемент 26 подключены к блоку 27 поиска, выходы которого соединены с коммутаторами 17- 20. Выходы тиристорных ключей 30-33 соединены с соответствующими секциями 38-41 электромагнитного схвата. Управляющие, входы тиристорных ключей 30-33 соединены соответственно с коммутаторами 17-20 и выходами регулирующих блоков 34-37, входы которых подключены к выходу компаратора 24. Блок 42 управления связан с электронным ключом 25. и блоком 27 поиска и служит только для их включения и отключения. Каждый из блоков 13-16 задания вероятных значений грузоподъемности секций схвата выполнен в виде стандартного ферродинамического задатчика типа Пф4, выход которого подключен к выпрямителю, а питание осуществлено от стабилизированно го ис- T04HHKai Вероятное значение грузоподъемности Pf- секции схвата для конкретного материала определяют расчетным Цутем либр экспериментально и устанавливают поворотом лимба, задатчика ПФ4. При этом выходной сигнал U.; соответствует вероятной грузоподъемности i-й секции схви.та.
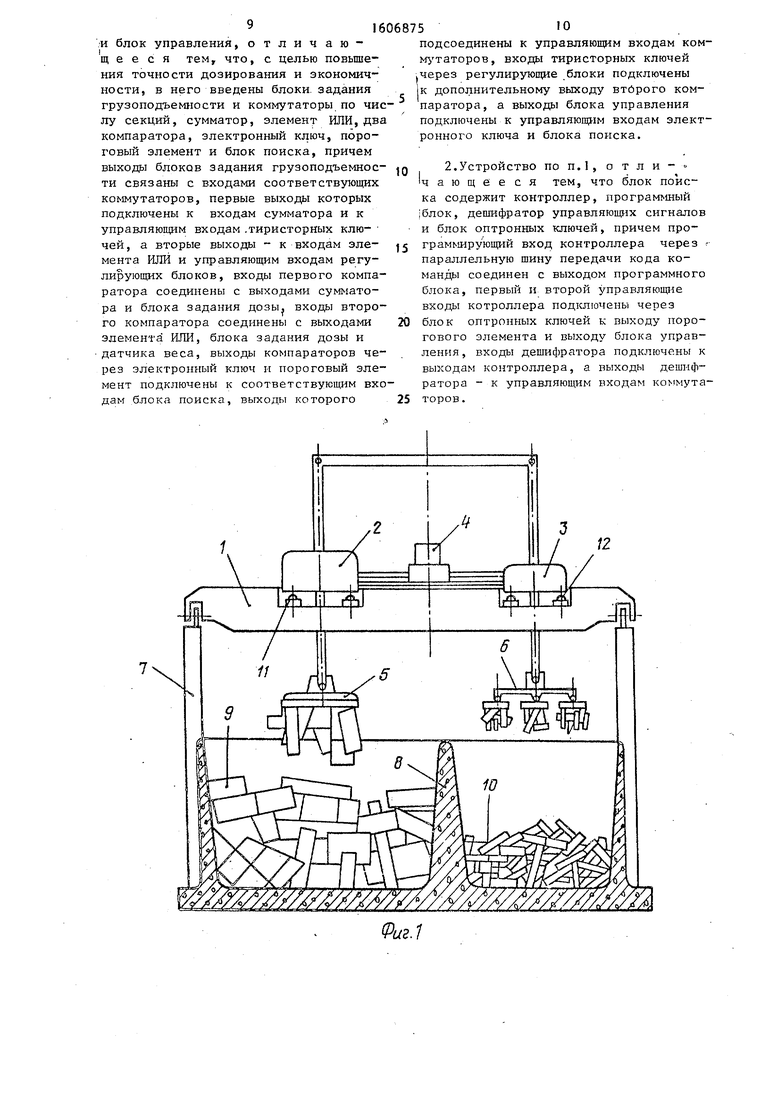
Блок 27 поиска (фиг.З) предназначен для реализации алгоритма поиска (фиг.4) итерационным методом Оптимальной комбинации сигнало в, управляющих работой коммутаторов 17-20. Блок 27 поиска содержит микроконтроллер 43, выполненный на БИСКР145ИК1807, программный блок 44, выполненный на БИС ППЗУ типа КР573РФ5, дешифратор 45 управляющих сигналов, реализованный на ИСК501ИДШ и блок 46 оптронных ключей, выполненный на оптронах АОУ ЮЗА,, причем контроллер 43 включен таким образом, что его программирующий вход через параллельную шину передачи кода команды -соединен с выходом программного устройства 44, первый и второй yпpaвляюш ie входы котроллера 43 подключены посредством блока оптронных
16068
ключей к выходу порогового элемента 26 и входу блока 42 управления. :Входы дешифратора 45 подключены к вы- ходам контроллера 43, а выходы демп-i- ;фратора 45- к управляющим входам коммутаторов 17-20.
Устройство работает следующим образом.
В исходном состоянии электромагнит-jл ный схват 5,6 находятся на заданной высоте над ферромагнитным материалом и его секции 38-41 обесточены. По команде из блока 42 управления ключ 25 соединяет выход компаратора 23 с входом порогового элемента 26.
При этом сигнал на входе порогового элемента 26 равен
15
ли, Uc;- Uj, .
где Ufj-- сигнал, пропорциональный вероятной грузоподъемности i-й секции схвата; сигнал, пропорциональный заданной дозе. Поскольку до включения блока 27 поиска коммутаторы 17-20 находятся в среднем положении, выходы блоков 13-16 не подключены к сумматору 21
5и его выходной сигнал
п
2:и,
о, а
iUg - Uj, Поэтому на входе бло-. ка 27 поиска появляется сигнал, раз- решающий поиск необходимый для заданной дозы оптимальной комбинации включаемых секций схвата. Затем по команде из блока 42 управления включается блок 27 поиска, выходы которого подключены к управляющим входам коммутаторов 17-20.
Блок 27 поиска работает следующим образом.
Сигна.д Пуск из блока 42 .З)
35
40
ко к заданной дозе Рд. Выбранная комбинация секций схвата включается посредством соответствующих коммутаторов 17-20, на выходах а которых имеется сигнал, поступающий на управляющий вход тиристорных ключей 30-33. После этого схват 5,6 опускается на материал 9, 10, происходит захват материала секциями схвата и подъема хвата на заданную высоту. На выходе датчика 29 веса-появляется сигнал Urti пропорциональный фактической до- материала, набранного схватом.
р зе Р
f
По команде из блока 42 управления через блок 46 оптронных ключей пост-у- 45 ключ 25 подключает к входу порогового
.пает на первый вход контроллера 43. элемента 26 компаратор 24. Сиглал ни При этом контроллер 43 Начинает выпол- входе порогового элемента 26 в этом нятьпрограмму поиска оптимальной ком- случае равен бинации выходных сигналов Y-. Коман- ди Uc- - (Um - U,).
. ды программы поступают с программного 50 До включения блока 27 поиска коммута- устройства 44, Алгоритм программ, -горы 17-20 находятся в положении О, (фиг.4) реализует итерационный метод поиска.Данный алгоритм поедусматрива- ет поиск оптимальной комбинации секций схвата (до набора материала), сум-гс марная вероятная грузоподъемность которых для данного материала наиболее близка к заданной дозе, и поиск (после набора материала схватом)той
сигнал на выходе элемента ИЛИис| 0, а сигнал на входе порогового элемента 26 равен
UUj Uj Л%,
т.е. пропорционален отклонению фактической массы дозы от заданной. Если Uqp Uj, то Ди О и доза готова. При
1606875
из включенных секций, вероятная грузоподъемность которой наиболее близка к величине отклонения фактической дозы от заданной.
В результате работы контроллера 43 на его выходах формируется управляющий код Yy, который посредством дешифратора 45 управления переключателями 17-20. Остановка блока 27 поис1 а производится при срабатывании псрого- вого элемента 26 в момент, когда ли, - и, либо 4U(p. Блок поиска 27 посредством коммутаторов
17-20 подключает ко входу сумматора 21 выходные сигналы Up , Uc-,..., Uci.i) , Cr блоков 13-16, соответствующие вероятным значениям грузоподъемности « екций схвата, в различных комбинациях по жесткой программе,
реализующей алгоритм итерационного поиска до момента, коцда Ди Au c (где ЛUf -пороговое значение Д U ). При этом на выходе порогового элемента появляется сигнал, прекращающий процесс поиска, и блок 27 отключается. В результате найдена такая комбинация включаемых секций схвата, при которой вероятное значение суммарной грузоподъемности схвата наиболее ёлиз
5
0
ко к заданной дозе Рд. Выбранная комбинация секций схвата включается посредством соответствующих коммутаторов 17-20, на выходах а которых имеется сигнал, поступающий на управляющий вход тиристорных ключей 30-33. После этого схват 5,6 опускается на материал 9, 10, происходит захват материала секциями схвата и подъема хвата на заданную высоту. На выходе датчика 29 веса-появляется сигнал Urti пропорциональный фактической до- материала, набранного схватом.
р зе Р
f
По команде из блока 42 управления 5 ключ 25 подключает к входу порогового
До включения блока 27 поиска коммута- -горы 17-20 находятся в положении О,
сигнал на выходе элемента ИЛИис| 0, а сигнал на входе порогового элемента 26 равен
До включения блока 27 поиска коммута- -горы 17-20 находятся в положении О,
UUj Uj Л%,
т.е. пропорционален отклонению фактической массы дозы от заданной. Если Uqp Uj, то Ди О и доза готова. При
7., 1606875
Ди.0 на входе блока 27 поиска появляется сигнал, разрешающий поиск той из включенных секций схвата, вероятная грузоподъемность которой найбо8
лее близка к величине uUtj,. По команде из Опока,42 управления включается блок 27 поиска, который, последовательно, переключая коммутаторы 17-20 в положение б, подключает к элемен- Q ту ИЛИ 22 выходы блоков 13-16 в соответствии с включенными секциями, начиная с блока, вьщодной сигнал которого соответствует наименьшему : значению вероятной грузоподъемности. 5
Б, момент, когда Ди , (где uUcn пороговое значение AU ) на выходе порогового элемента 26 появляется сигнал, прекращающий поиск и
сбрасывается в приевшую .емкость (например, посредством конвейера в бадью), для последующей загрузки в плавильный агр.егат. Для упрощения бло управления приводом перемещения балки 1 и приводом 4 подъема схвата 5,6 на схеме не показан.
При наборе следущих доз данного материала выбранная комбинация вютю- чаемых секций схвата остается неизмен ной, ,а блок 27 поиска осуществляет поиск лишь той секции схвата, с которой следует производить сброс избытк материала. При изменении величины до зы и гранулометрического состава материала должна быть соответственно выбрана и изменена необходимая ком бинация включае№1х секций схвата в
ИГНаЛ, ну t:r.iJcnncinjuj,rxri
27 поиска отключается. В резуль- о соответствии с их вероятной для дан: -,,п-пг илоггопмяпя гп-ичпппт емностью. в
25
30
блок
тате найдена та секция схвата из числа включенных, веро ятная грузоподъемность которой наиболее близка к отклонению Ли, фактической дозы от заданной РЭ„
Если, например, -в результате поиска найдена секция 40, то сброс в нее избытка материала, соответствующего и , осуществляется следующим образом Поскольку коммутатор 18 находится в положении б, включается регулирующий блок 36, выход которого по дключен к управляющему входу тиристорного клю- ча 32, питающего секцию 40 электромагнитного схвата. При (p О сигна-п на jj выходе блока 36 отсутствует и ток в секции 40, а следовательно, и ее грузоподъемность максимальны. При поступлений на управляющий вход блока 36 сигнала Ujp 5 О сигнал на его выходе дО начинает расти по линейному закону, ток в секции 40 соответственно уменьшается и происходит сброс материалу с этой .секции до момента, кoгдa U 0- g , мпмрттт ток в секции 40
ного материала грузоподъемностью. В том случае,, если масса дозы Р прев шает вероятное значение суммарной грузоподъемности схвата, набор дозы, производится за два и более раз, пр чем только при последнем наборе, ког п
да Рз 51/сР
15
этот момент ток в секции 4П снова возрастает до первоначгшьной величины.
Благодаря управлению током одной, заранее выбранной секции схвата (из числа включенных), вероятная Трузо- - подъемность которой наиболее близка 50 к отклонению &U, вероятность сброса в этой секции количества материала, соответствующего uU, значительно возрастает (примерно в 2,5-3,0 раза), что уменьшает погрешность дозирования 55
в каждом цикле.
На этом процесс дозирования-закан-, чивается и материал, набранный схва- том, транспортируется балкой 1 и
осуществляется поиск оп
тимальной комбинации включаемых, секций с1свата в соответствии с фактичес тическим остатком.
Таким образом, предлагаемое весо- дозирующее устройство для кусковых ферромагнитных материалов позволяет повысить точность дозирования в 2,5- 3,0 раза за счет включения оптимальной для заданной дозы комбинации сек ций схвата в соответствии с их веро ятной грузоподъемностью и сбросе из бытка материала с той из включенных секций схвата, вероятная грузоподъем ность которой наиболее близка к отклонению фактической дозы от заданно
Кроме того, использование изобре ния позволяет уменьшить расход элек роэнергии, потребляемой электромагн ным схватом в процессе дозирования, за счет включения не всех секций iсхвата, а лишь оптимальной их комб нации.
Формула изобретени
1. Устройство для весового дозирования кусковых ферромагнитных материалов, содержащее секционный эле ромагнитный схват с датчиком веса, тиристорные ключи с регулирующими блоками, подключенные к соответству щим секциям схвата, блок задания до
8
сбрасывается в приевшую .емкость (например, посредством конвейера в бадью), для последующей загрузки в плавильный агр.егат. Для упрощения бло управления приводом перемещения балки 1 и приводом 4 подъема схвата 5,6 на схеме не показан.
При наборе следущих доз данного материала выбранная комбинация вютю- чаемых секций схвата остается неизменной, ,а блок 27 поиска осуществляет поиск лишь той секции схвата, с которой следует производить сброс избытка материала. При изменении величины дозы и гранулометрического состава материала должна быть соответственно выбрана и изменена необходимая комбинация включае№1х секций схвата в
о соответствии с их вероятной для дан,,п-пг илоггопмяпя гп-ичпппт емностью. в
5
30
jjдО-
ного материала грузоподъемностью. В том случае,, если масса дозы Р превышает вероятное значение суммарной грузоподъемности схвата, набор дозы, производится за два и более раз, причем только при последнем наборе, ког- п
да Рз 51/сР
15
.
50 55
осуществляется поиск оптимальной комбинации включаемых, секций с1свата в соответствии с фактичес- тическим остатком.
Таким образом, предлагаемое весо- дозирующее устройство для кусковых ферромагнитных материалов позволяет повысить точность дозирования в 2,5- 3,0 раза за счет включения оптимальной для заданной дозы комбинации секций схвата в соответствии с их вероятной грузоподъемностью и сбросе избытка материала с той из включенных секций схвата, вероятная грузоподъемность которой наиболее близка к отклонению фактической дозы от заданной.
Кроме того, использование изобретения позволяет уменьшить расход электроэнергии, потребляемой электромагнитным схватом в процессе дозирования, за счет включения не всех секций iсхвата, а лишь оптимальной их комбинации.
Формула изобретения
1. Устройство для весового дозирования кусковых ферромагнитных материалов, содержащее секционный электромагнитный схват с датчиком веса, тиристорные ключи с регулирующими блоками, подключенные к соответствующим секциям схвата, блок задания дозы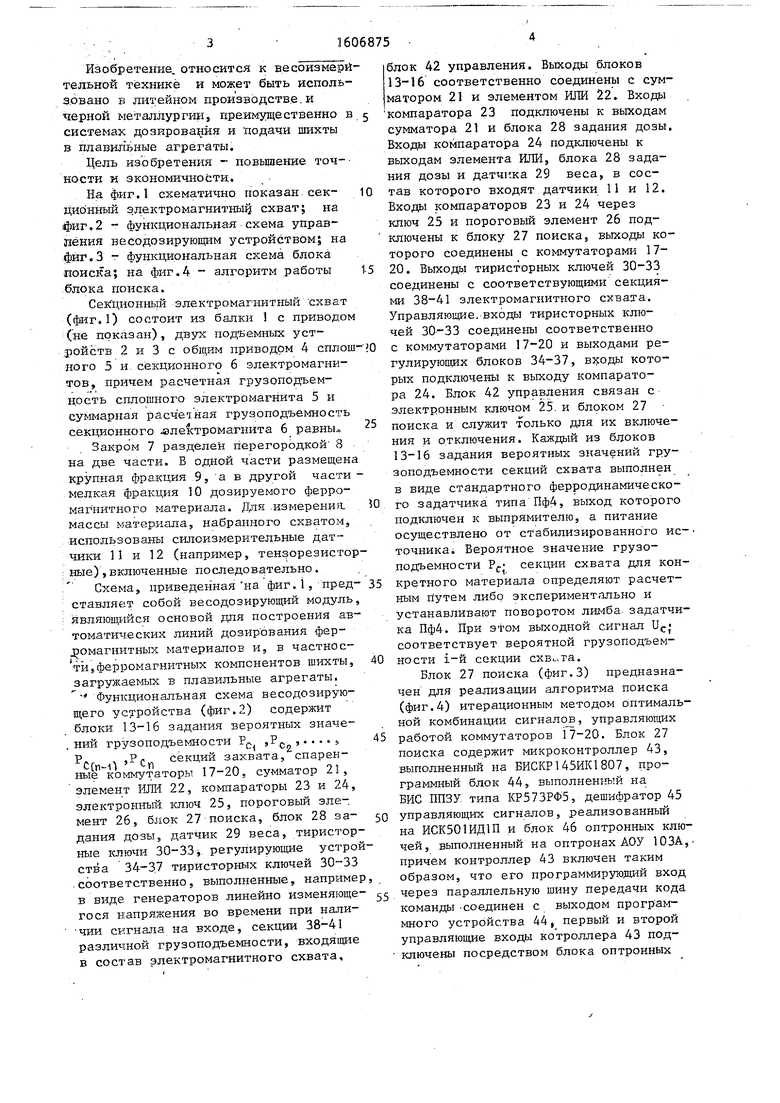

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дозирования кусковых ферромагнитных материалов | 1987 |
|
SU1483277A1 |
| Устройство для управления электромагнитным краном | 1982 |
|
SU1089031A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969596A1 |
| Устройство для управления преобразователем частоты | 1988 |
|
SU1629953A1 |
| Электромагнитный преобразователь перемещения в код | 1987 |
|
SU1439736A1 |
| Устройство управления процессом весового дозирования | 1988 |
|
SU1606873A1 |
| Способ преобразования переменного тока в переменный | 1986 |
|
SU1417141A1 |
| Устройство для определения количества запасных блоков | 1986 |
|
SU1363257A1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1201790A1 |
| Многоканальный стимулятор | 1983 |
|
SU1181671A1 |

Изобретение относится к области весоизмерительной техники и может быть использовано в литейном производстве и черной металлургии, преимущественно в системах дозирования и подачи шихты в плавильные агрегаты. Цель изобретения - повышение точности дозирования и уменьшение расхода электроэнергии. Устройство содержит секционный электромагнитный схват, тиристорные ключи с регулирующими блоками для питания секций схвата, датчик веса, блок 28 задания дозы и блок 42 управления, кроме того, в него дополнительно введены блоки 13 - 16 задания вероятных значений грузоподъемности секций схвата, коммутаторы 17 - 20 по числу секций, сумматор 21, элемент ИЛИ 22, два компаратора 23, 24, ключ 25, пороговый элемент и блок поиска. 1 з.п. ф-лы, 4 ил.
Фиг.1
r/Jamno Ши.3
шаиевпс ацямк;
Выдать ипр-код yi на выходе KOH/npojj- лера пропорциональна значению Г uci
..
ED Ci:±i
быдать упр. код yi пропорционал&т .
| Антоненко В.Т., Врублевския В.И | |||
| и Шмительский Н.в | |||
| Электромагнитные дозаторы в аграночной шихте,- Механизация и автоматизация производст ва | |||
| М., 1966, № 12 | |||
| Левонтин Н.И., Белопольский Л.Ю | |||
| и Мороз И.А | |||
| Дифференцированный подъемный электромагнит | |||
| - Литейное производство | |||
| М., I960, № 3, с.34. |
