Изобретение относится к области весового дозирования и может быть испопьэова- но для непрерывного дозирования материалов, имеющих различные статистические параметры, таких, например, как макаронные изделия, конфеты, фрукты.
Целью изобретения является непрерывность и ускорение процесса перенастройки при изменении вида или свойств дозируемого материала.
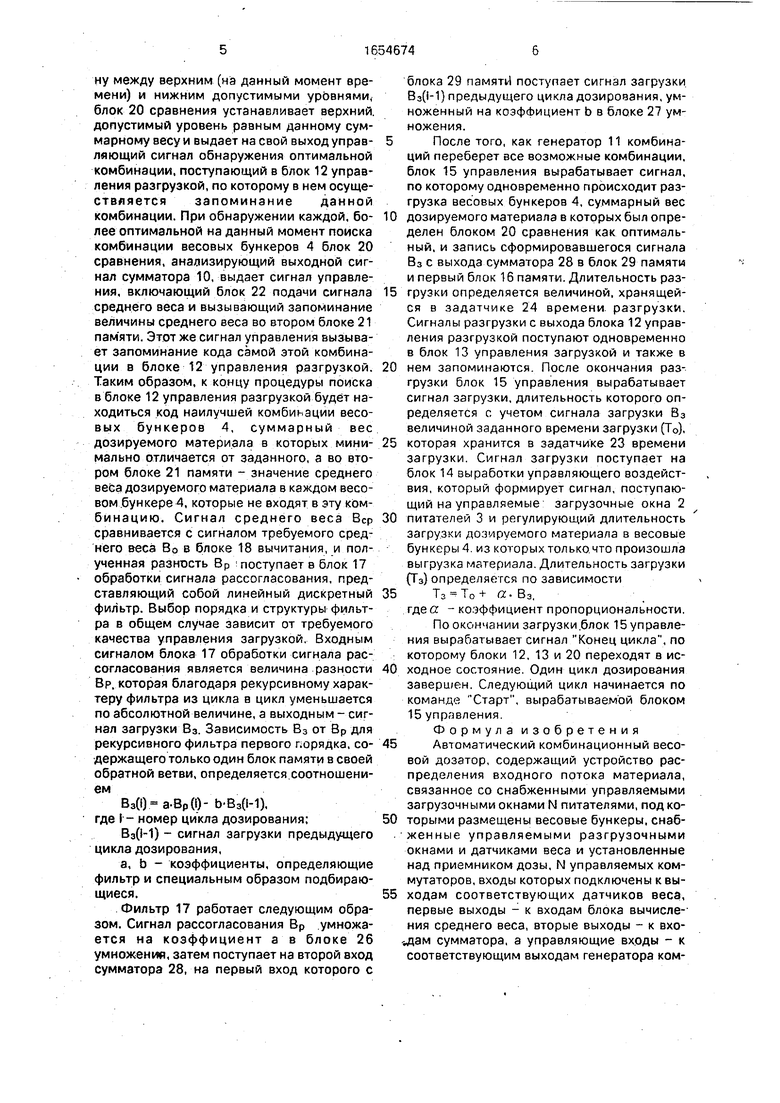
На фиг. 1 изображена структурная схема дозатора; на фиг.2 - обобщенная структурная схема дозатора с раскрытой структурой устройства обработки сигнала рассогласования.
Автоматический комбинационный весовой дозатор содержит устройство 1 распре- деления входного потока материала, связанное со снабженными управляемыми загрузочными окнами 2 N питателями 3. под которыми размещены весовые бункеры 4, снабженные управляемыми разгрузочными окнами 5 и датчиками 6 веса и установленные над приемником 7 дозы, N управляемых коммутаторов 8, входы которых подключены к выходам соответствующих датчиков 6 веса, первые выходы - к входам блока 9 вычисления среднего веса, вторые выходы - к входам сумматора 10, а управляющие входы - к соответствующим выходам генератора 11 комбинаций, которые подключены к входам блока 12 управления разгрузкой, выходы которого соединены с соответствующими управляемыми разгрузочными окнами 5 и входами блока 13 управления загрузкой, выходы которого соединены с входами соответствующих питателей 3, а (N+1)-u вход блока 13 управления загрузкой подключен к выходу блока 14 выработки управляющего воздействия, первый вход которого соединен с блоком 15 управления, подключенного своим вторым выходом к (N+1)-u входу блока 12 управления разгрузкой, а второй вход - последовательно с выходом первого блока 16 памяти, первый вход которого связан с выходом блока 17 обработки сигнала рассогласования, второй вход которого совместно с вторым входом первого блока 16 памяти подключен к (N+1)-My входу блока 12 управления разгрузкой, а первый вход подключен к выходу блока 18 вычитания, к первому входу которого подключен задатчик 19 среднего веса, причем к выходу сумматора 10 подключен блок 20 сравнения, выход которого связан с (М+2)-м входом блока 12 управления разгрузкой, вторым входом второго блока 21 памяти и первым входом блока 22 подачи сигнала среднего веса, вторым входом подключенного к выходу блока 9 вычисления среднего веса, а выходом - к первому входу второго блока 21 памяти, выход которого подключен к второму входу блока 18 пычигания, задатчик 23 времени загрузки
и задатчик 24 времени разгрузки, подключенные к соответствующим входам блока 15 управления.
N управляемых коммутаторов 8, сумматор 10, генератор 11 комбинаций, блок 12
0 управления разгрузкой и блок 20 сравнения образуют схему 25 поиска оптимальной комбинации,
Блок 17 обработки сигнала рассогласования состоит из блоков 26 и 27 умножения,
5 сумматора 28 и бпока 29 памяти, первый вход которого совместно с выходом сумматора 28 соединен г, первым входом первого блока 16 памяти, второй вход соединен с вторым выходом блока 15 управления, а вы0 ход - с зходом блока 27 умножения, выход которого подключен к первому входу сумматора 28, второй вход которого связан с выходом блока 26 умножения, вход которого подключен к. выходу блока 18 вычитания.
5Дозатор работает следующим образом.
Генератор 11 комбинаций по сигналу Старт, поступающему от блока 15 управления, начинает последовательно выдавать всеврзможные комбинации нулей и единиц
0 на свои выходы, управляющие положением коммутаторов 8 и поступающие одновременно на блок 12 управления разгрузкой. Сигналы веса, поступающие от датчиков 6 веса, которыми снабжены бункеры 4, через
5 управляемые коммутаторы 8 поступают либо на входы блока 9 вычисления среднего веса, либо на входы сумматора 10. Последний осуществляет суммирование сигналов, поступающих от всех подключенных в дан0 ный момент времени к его входам датчиков 6 веса, и выдает суммарный сигнал, который поступает на блок 20 сравнения. Блок 20 сравнения принимает решение о соответствии анализируемой в данный момент вре5 мени комбинации весовых бункеров 4 критерию оптимальности, например попаданию величины суммарного веса находящегося в них материала в зону между .верхним и нижним допустимыми уровнями.
0 Нижний допустимый уровень обычно устанавливается равным требуемому весу дозы, а верхний допустимый уровень динамически изменяется в процессе поиска и устанавливаетсяравнымвесу,
5 соответствующему наилучшей из всех проверенных на данный момент времени комбинаций весовых бункеров 4. Таким образом, при установлении того факта, что очередная проверяемая комбинация бункеров дает суммарный вес, попадающий в зону между верхним (на данный момент времени) и нижним допустимыми уровнями, блок 20 сравнения устанавливает верхний допустимый уровень равным данному суммарному весу и выдает на свой выход управляющий сигнал обнаружения оптимальной комбинации, поступающий в блок 12 управления разгрузкой, по которому в нем осуществляется запоминание данной комбинации. При обнаружении каждой, более оптимальной на данный момент поиска комбинации весовых бункеров 4 блок 20 сравнения, анализирующий выходной сигнал сумматора 10, выдает сигнал управления, включающий блок 22 подачи сигнала среднего веса и вызывающий запоминание величины среднего веса во втором блоке 21 памяти. Этот же сигнал управления вызывает запоминание кода самой этой комбинации в блоке 12 управления разгрузкой. Таким образом, к концу процедуры поиска в блоке 12 управления разгрузкой будет находиться код наилучшей комбинации весовых бункеров 4, суммарный вес дозируемого материала в которых минимально отличается от заданного, а во втором блоке 21 памяти - значение среднего веса дозируемого материала в каждом весовом бункере 4, которые не входят в эту комбинацию. Сигнал среднего веса Вер сравнивается с сигналом требуемого среднего веса Во в блоке 18 вычитания, и полученная разность Вр поступает в блок 17 обработки сигнала рассогласования, представляющий собой линейный дискретный фильтр. Выбор порядка и структуры фильтра в общем случае зависит от требуемого качества управления загрузкой Входным сигналом блока 17 обработки сигнала рассогласования является величина разности Вр, которая благодаря рекурсивному характеру фильтра из цикла в цикл уменьшается по абсолютной величине, а выходным - сигнал загрузки В3. Зависимость Вэ от Вр для рекурсивного фильтра первого порядка, содержащего только один блок памяти в своей обратной ветви, определяется соотношением
В3(1)а-Вр(0- Ь-В3(1-1). где i - номер цикла дозирования;
В3(1-1) - сигнал загрузки предыдущего цикла дозирования,
a, b - коэффициенты, определяющие фильтр и специальным образом подбирающиеся.
Фильтр 17 работает следующим образом. Сигнал рассогласования Вр умножается на коэффициент а в блоке 26 умножения, затем поступает на второй вход сумматора 28, на первый вход которого с
блока 29 памяти поступает сигнал загрузки Вз(И) предыдущего ци«-ла дозирования, умноженный на коэффициент b в блоке 27 умножения.
После того, как генератор 11 комбинаций переберет все возможные комбинации, блок 15 управления вырабатывает сигнал, по которому одновременно происходит разгрузка весовых бункеров 4, суммарный вес
дозируемого материала в которых был определен блоком 20 сравнения как оптимальный, и запись сформировавшегося сигнала В3 с выхода сумматора 28 в блок 29 памяти и первый блок 16 памяти. Длительность разгрузки определяется величиной, хранящейся в задатчике 24 времени разгрузки. Сигналы разгрузки с выхода блока 12 управления разгрузкой поступают одновременно в блок 13 управления загрузкой и также в
нем запоминаются После окончания разгрузки блок 15 управления вырабатывает сигнал загрузки, длительность которого определяется с учетом сигнала загрузки В3 величиной заданного времени загрузки (Т0).
которая хранится в задатчике 23 времени загрузки. Сигнал загрузки поступает на блок 14 выработки управляющего воздействия, который формирует сигнал, поступающий на управляемые загрузочные окна 2
питателей 3 и регулирующий длительность загрузки дозируемого материала в весовые бункеры 4 из которых только что произошла выгрузка материала. Длительность загрузки (Т3) определяется по зависимости
Т3 T0i- а. Вэ.
где а -коэффициент пропорциональности. По окончании загрузки блок 15 управления вырабатывает сигнал Конец цикла, по которому блоки 12, 13 и 20 переходят в исходное состояние Один цикл дозирования завершен. Следующий цикл начинается по команде Старт, вырабатываемой блоком 15 управления
Формула изобретения
Автоматический комбинационный весовой дозатор, содержащий устройство распределения входного потока материала, связанное со снабженными управляемыми загрузочными окнами N питателями, под которыми размещены весовые бункеры, снабженные управляемыми разгрузочными окнами и датчиками веса и установленные над приемником дозы, N управляемых коммутаторов, входы которых подключены к выходам соответствующих датчиков веса. первые выходы - к входам блока вычисления среднего веса, вторые выходы - к входам сумматора, а управляющие входы - к соответствующим выходам генератора комбинаций, которые подключены к входам блока управления разгрузкой, выходы которого соединены с соответствующими управляемыми разгрузочными окнами и входами блока управления загрузкой, выходы которого соединены с входами соответствующих питатетелй, а (М+1)-й вход блока управления загрузкой подключен к выходу блока выработки управляющего воздействия, первый вход которого соединен с блоком управления, подключенного своим вторым выходом к (Ы+1)-му входу блока управления разгрузкой, а второй вход - последовательно с выходом первого блока памяти, первый вход которого связан с выходом блока вычитания, к первому входу которого подключен задатчик среднего веса, причем к выходу сумматора подключен блок сравнения, выход которого связан с (М+2)-ым входом блока управления разгрузкой и первым входом блока подачи сигнала среднего веса, вторым входом подключенного к выходу, блока вычисления среднего веса, а выходом - к второму входу блока вычитания, задатчик времени загрузки и задатчик времени разгрузки, подключенные к
соответствующим входам блока управления, отличающийся тем, что, с целью непрерывности и ускорения процесса перенастройки при изменении вида или свойств дозируемого материала, в него введены второй блок памяти и блок обработки сигнала рассогласования, первый вход которого соединен с выходом блока вычитания, а выход - с первым входом первого блока памяти, второй вход которого совместно с вторым
входом блока обработки сигнала рассогласования подключены к второму выходу блока управления, первый вход второго блока памяти соединен с выходом блока подачи сигнала среднего веса, а выход - с вторым
входом блока вычитания, выход блока сравнения подключен к второму входу второго блока памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический комбинационный дозатор | 2023 |
|
RU2814509C1 |
| Устройство для управления весовым порционным дозатором | 1991 |
|
SU1830518A1 |
| Устройство для многокомпонентного порционного дозирования компонентов синтетических моющих средств | 1991 |
|
SU1784953A1 |
| КОМБИНАЦИОННЫЙ ДОЗАТОР | 2002 |
|
RU2229103C2 |
| Весовой дозатор непрерывного действия | 1985 |
|
SU1310643A1 |
| Устройство для многокомпонентного дозирования компонентов синтетических моющих средств | 1990 |
|
SU1805454A1 |
| Цифровое устройство управления весовым порционным дозатором | 1980 |
|
SU892226A1 |
| Цифровое устройство управления весовым дозированием | 1984 |
|
SU1167440A1 |
| Устройство управления весовым порционным дозатором | 1979 |
|
SU785654A1 |
| Устройство управления весовым порционным дозатором | 1990 |
|
SU1783484A1 |
Изобретение относится к области весового дозирования и может быть использова- но для непрерывного дозирования материалов с различными статистическими свойствами. Целью изобретения является непрерывность и ускорение процесса перенастройки при изменении вида или свойств дозируемого материала. С поНсова- ия ми тся рели помощью генератора 11 комбинаций осуществляются подключение датчиков 6 веса то к входам блока 9 вычисления среднего веса, то к входам сумматора 10 и запоминание во втором блоке 21 памяти каждой последующей лучшей (оптимальной с точки зрения набора веса дозы) комбинации до момента исчерпания всех возможных комбинаций. Величина наиболее оптимального веса дозы сравнивается в блоке 18 вычитания с заданным весом дозы,и полученная величина рассогласования поступает в блок 17 обработки сигнала рассогласования, представляющий собой линейный дискретный рекурсивный фильтр. Благодаря рекурсивному характеру фильтра величина сигнала рассогласования из цикла в цикл уменьшается по абсолютной величине. 2 ил. L / I A, aj/ сзъ т ъ-хт 7 Л.-НГПЙГ ьЈ Jd л-€5 И о ел J О vj Јь
А .В
Зм 2
. J
Фиг.2
| Патент США № 4484645, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
