Изобретение относится к рентгеновской вычислительной томографии и может использоваться для контроля внутренней структуры объектов, тестирован;-1 измерительных каналов томографа,
Цель изобретения - повышение достоверности измерений за счет расширения возможностей позиционирования.
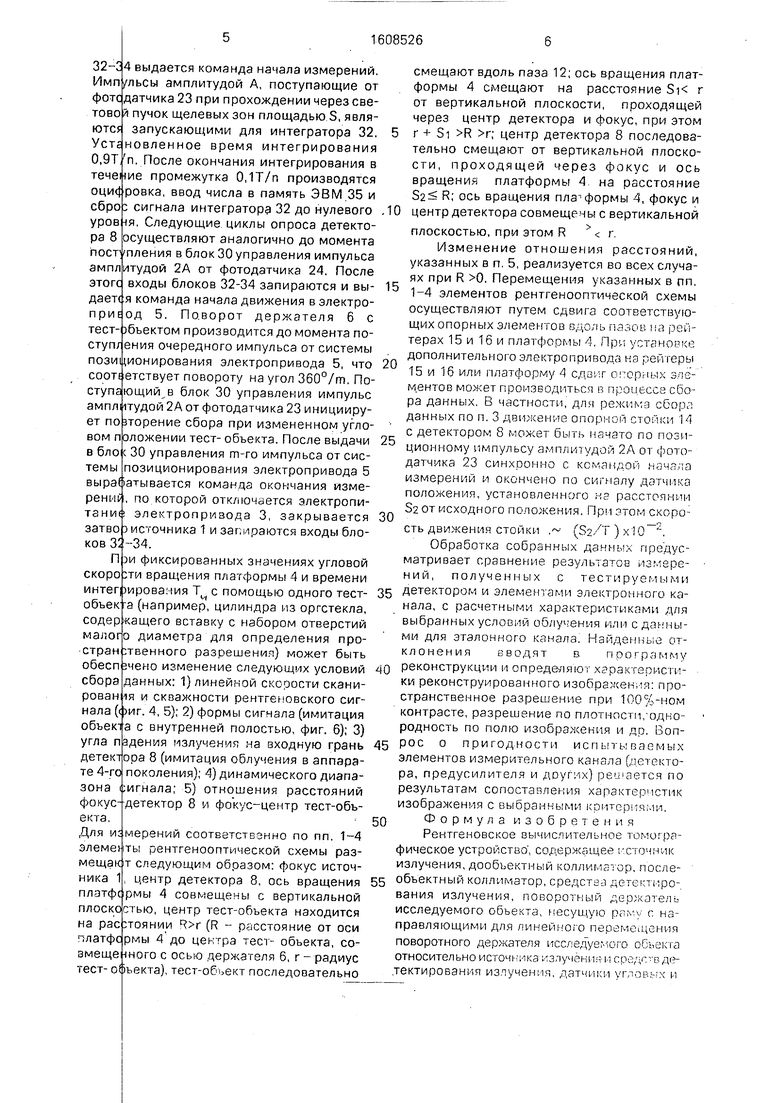
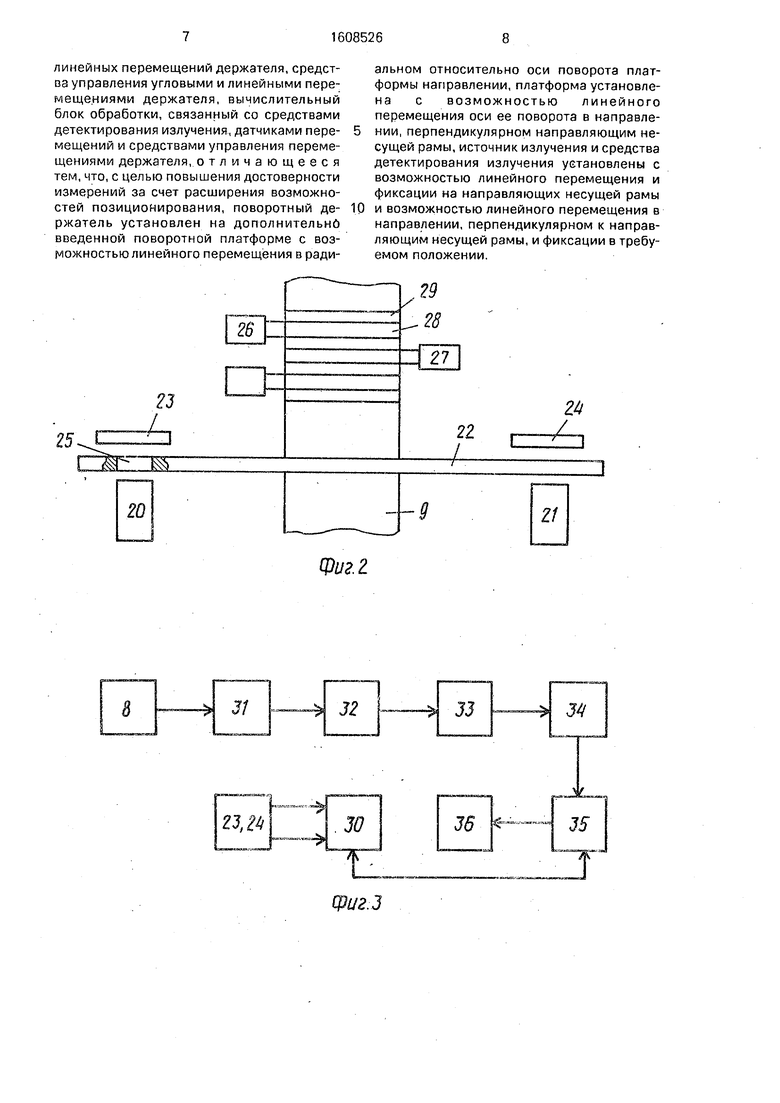
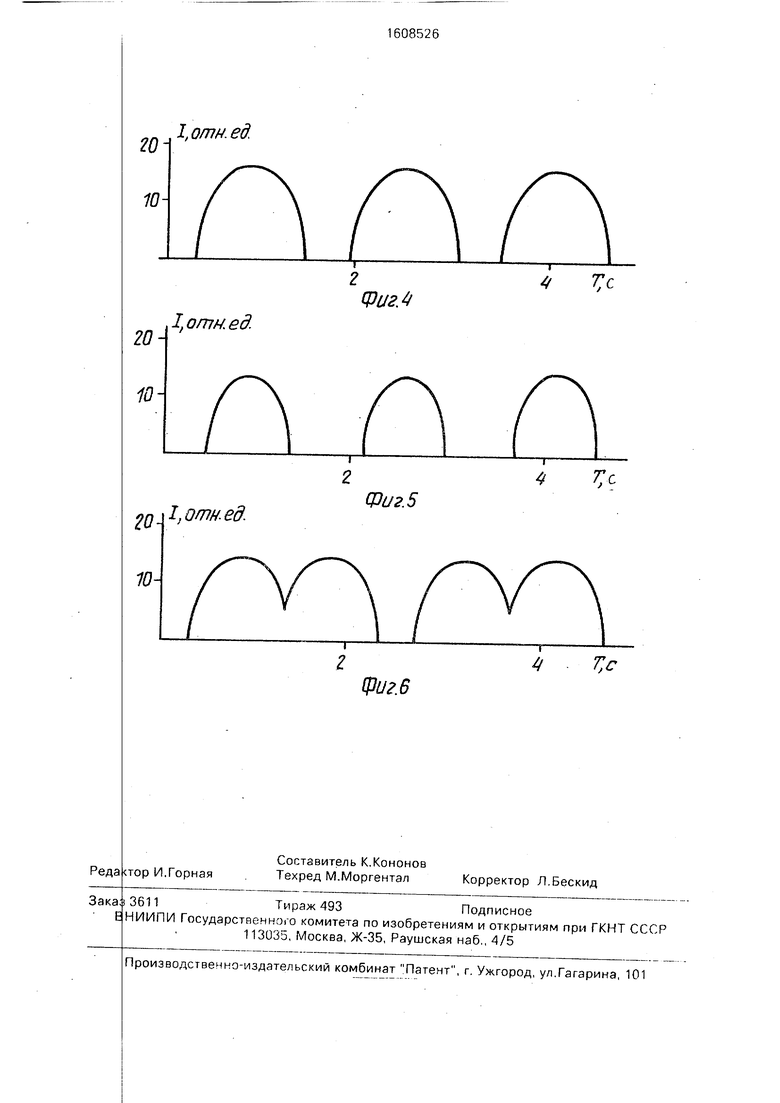
На фиг. 1 показана рентгенооптическая схема рентгеновского вычислительного томографического устройства; на фиг. 2 - система позиционирования; на фиг. 3 - .блок-схема электронных трактов управления и обработки сигналов; на фиг. - временные зависимости интенсивности рентгеновского потока.
Рентгеновское вычислительное томографическое устройство содержит рентгеновский источник 1 излучения, дообьектный коллиматор 2, электропривод 3 опорной платформы 4, несущей электропривод 5 держателя 6 исследуемого объекта (не показан), послеобъектный коллимматор 7 и детектор 8 излучения. Вращение к платформе 4 передается с помощью вала 9. При исследовании массивных объектов с нижней стороны платформы 4 устанавливают противовесы 10 и 11. Перемещение держателя 6 совместно с электроприводом 5 относительно оси вала 9 осуществляют вдоль радиального паза 12 на платформе 4. Перемещения источника 1 совместно с коллиматором 2 и детектора 8 совместно с коллиматором 7 по вертикали осуществляют вдоль опорных стоек 13 и 14, установлен- ных на рейтерах 15 и 16, при фиксированном положении корпусов коллиматоров 2 и 7. Перемещения источника 1, детектора 8, электропривода 3, коллиматоров 2 и 7 в горизонтальной плоскости осуществляют вдоль направляющих 17 и 18 в виде оптических скамей и вдоль пазов на рейтерах 15,16 и 17, перпендикулярных направляющим 17 и 18, которые образуют несущую раму устройства.
Управление движением производится по импульсным сигналам систем позиционирования, расположенных внутри корпусов электроприводов 3 и 4. В состав системы позиционирования электропривб- даЗ входят направленныеисточники 20 и 21 света, диск 22, закрепленный на валу 9, и фотодатчики 23 и 24. На диске 22 имеется п радиальных щелевых зон 25, расположенных с угловым шагом 360 /п. Площади п-1 зон 25 равны S, площадь одной из зон 25 равна 2S. Электропривод 3, платформа 4, вал 9, электропривод 5 и держатель 6 являются средствами линейного и углового перемещений. Фотодатчики 23 и 24 служат датчиками угловых перемещений.
Система позиционирования (не показана), расположенная в корпусе электропривода 5, аналогичным образом содержит одну пару источник света - фотодатчики на дисках, связанную с осью держателя 6. На диске имеются m щелевых зон равной площади (п HTI М О -10 ).Подача электропитания
0 электроприводу 5 и передача сигналов управления осуществляются с помощью скользящих контактов 26 и 27, проводящих колец 28 и электрического кабеля, проходящего внутри вала 9. Проводящие кольца раз5 делены электроизолирующими кольцами 29.
Сигналы с фотодатчиков системы позиционирования поступают в блок 30 управления перемещениями. Обработка сигнала
0 детектора 8 производится электронным трактом, включающим предусилитель 31, интегратор 32, коммутатор 33, аналого-цифровой преобразователь 34 и ЭВМ 35. Оцифрованные данные измерений и результаты
5 вычислений выводят на дисплей 36. Каждый
из блоков 31- 34 и детектор 8 выполнены в
виде отдельных модулей и подключаются в
измерительную цепь с помощью разьемов.
В исходном положении фокус источни0 ка 1 и центр детектора 8 совмещены с прямой, которая образует с осью вала 9 прямой угол. Ось держателя 6 параллельна оси вала 9. В системе позиционирования электропривода 5 центр одной из m щелевых зон
5 совмещен с осью светового пучка, создаваемого направленным источником. В системе позиционирования электропривода 3 пары источник 20 и 21 света - фотодатчик 23 и 24 установлены диаметрально противопо0 ложно. Прямая, пересекающая центры фотодатчиков 23 и 24, образует угол 90° с вертикальной плоскостью, проходящей через центры входного окна детектора 8 и . фокусного пятна источника 1. На держателе
5 6 закреплен тест-объект.
По пусковому сигналу, поступающему в блок 30 управления, выдаются команды включения электропривода 3 и открытия затвора (не показан), установленного перед
0 выходным окном источника 1. Через 2-4 с, в течение которых производится разгон и стабилизация скорости вращения платформы 4, в электронные блоки 31-34 и ЭВМ 35 выдается команда готовности к измерени5 ям. Через промежуток времениД Т Т/20 (Т - период поворота платформы 4 в установившемся режиме) после поступления до фотодатчика 23 импульса с амплитудой 2А при прохождении через световой пучок щелевой зоны площадью 2S блоком 30 в блоки
32- Имп
скоро интег объек
плоско на paci
4 выдается команда начала измерений /льсы амплитудой А, поступающие от фотс|датчика 23 при прохождении через све й пучок щелевых зон площадью S, явля запускающими для интегратора 32 новленное время интегрирования п. После окончания интегрирования в промежутка 0,1Т/п производятся оцисЦровка, ввод числа в память ЭВМ 35 и сигнала интегратору 32 до нулевого уровйя. Следующие циклы опроса детекто- осуществляют аналогично до момента пления в блок 30 управления импульса итудой 2А от фотодатчика 24. После входы блоков 32-34 запираются и вы- дает({я команда начала движения вэлектро- д 5. Поворот держателя 6 с )бьектом производится до момента по- ступ/ ения очередного импульса от системы .ионирования электропривода 5, что соответствует повороту на угол 360°/т, По- блок 30 управления импульс 1ТУДОЙ 2А от фотодатчика 23 иницииру- позторение сбора при измененном угло- положении тест- объекта. После выдачи 30 управления т-го импульса от сис- позиционирования электропривода 5 тывается команда окончания изме- по которой отключается электропи- электропризода 3, закрывается затвор источника 1 и запираются входы бло- -34.
фиксированных значениях угловой вращения платформы 4 и времени
тово юте Устг 0,9Т
тече|йие
ОЦИ(|
сбро уров ра 8 пост ампл это ГС
Пэи
)ирования Т с помощью одного теста (например, цилиндра из оргстекла, содер кащего вставку с набором отверстий малого диаметра для определения про- стран твенного разрешения) может быть обесп зчено изменение следующих условий сбора данных: 1) линейной скорости сканирован 1я и скважности рентгеновского сигнала (оиг. 4, 5); 2) формы сигнала (имитация объек1а с внутренней полостью, фиг. 6); 3) угла падения излучения на входную грань детек-ijopa 8 (имитация облучения в аппара- поколения): 4) динамического диапа- сигнала; 5) отношения расстояний детектор 8 и фокус-центр тест-объте 4-го зона
фокус екта.
Для измерений соответствэнно по пп. 1-4 элементы рентгенооптической схемы раз- меща|4т следующим образом: фокус источ- центр детектора 8, ось вращения платфс рмы 4 совмещены с вертикальной стью, центр тест-обьекта находится тоянии (R - расстояние от оси латформы 4 до центра тест- объекта, совмещенного с осью держателя 6, г- радиус тест- офьекта), тест-объект последовательно
5
5
.10
15
20
25
0
5
5
смещают вдоль паза 12; ось вращения платформы 4 смещают на расстояние Si г от вертикальной плоскости, проходящей через центр детектора и фокус, при этом г + Si R r; центр детектора 8 последовательно смещают от вертикальной плоскости, проходящей через фокус и ось вращения платформы 4 на рассто.чние $2 R; ось вращения пла-формы 4, фокус и центр детектора совмещены с вертикальной плоскостью, при этом R г.
Изменение отношения расстояний, указанных в п. 5, реализуется во всех случаях при R 0. Перемещения указанных в пп. 1-4 элементов рентгенооптической схемы осуществляют путем сдвига соответствующих опорных элементов вдоль пазов па рейтерах 15 и 16 и платформы А, При установке дополнительного электропривода на рейтеры 15 и 16 или платформу 4 сдаяг 0 70рных зле- м.ентов может производиться в процессе сбора данных. В частности, для режима сбора данных по п. 3 движение опорной стойки 14 с детектором 8 может быть начато по позиционному импульсу амплитудой 2А от фотодатчика 23 синхронно с командой ,чочала измерений и окончено по сигналу ,цатчика положения, установленного на расстоянии S2 от исходного положения. При этом скорость движения стойки . (Sa/T ) .
Обработка собранных данных предусматривает сравнение результатов измере- НИИ, полученных с тестируемыми детектором и элементами электронного канала, с расчетными характеристиками для выбранных условий облу1-;ен1.1я или с даькчы- ми для эталонного канала. Найденные отклонения вводят в программу реконструкции и опредш1яют характеристи- ки реконструированного изобра;г( пространственное разрешение при 100%-ном контрасте, разрешение по плотности,-однородность по полю изображения и др. Вопрос о пригодности испытываемых элементов измерительного канала (детектора, предусилителя и доуГмх) реи ается по результатам сопоставления характеристик изображения с выбранными критериями. Формула изобретения Рентгеновское вычислительное томографическое устройство , содержащее гхточник излучения, дообьектный коллиматор, после- объектный коллиматор, сре,цстза детект ;ро- вания излучения, поворотный дер;; атель исследуемого объекта, несущую paN-v с направляющими для линейного переме цения поворотного держателя исследуемсм О объекта относительно истом1-:1-1ка к-злучени.ч и средеVB детектирования излучения, датчики угловь;;-; и
линейных перемещений держателя, средст- 03 управления угловыми и линейными перемещениями держателя, вычислительный блок обработки, связанный со средствами детектирования излучения, датчиками перемещений и средствами управления перемещениями держателя, отличающееся тем, что, с целью повышения достоверности измерений за счет расширения возможностей позиционирования, поворотный держатель установлен на дополнительно введенной поворотной платформе с воз- (ожностью линейного перемещения в ради0
альном относительно оси поворота платформы направлении, платформа установлена с возможностью линейного перемещения оси ее поворота в направлении, перпендикулярном направляющим несущей рамы, источник излучения и средства детектирования излучения установлены с возможностью линейного перемещения и фиксации на направляющих несущей рамы и возможностью линейного перемещения в направлении, перпендикулярном к направляющим несущей рамы, и фиксации в требуемом положении.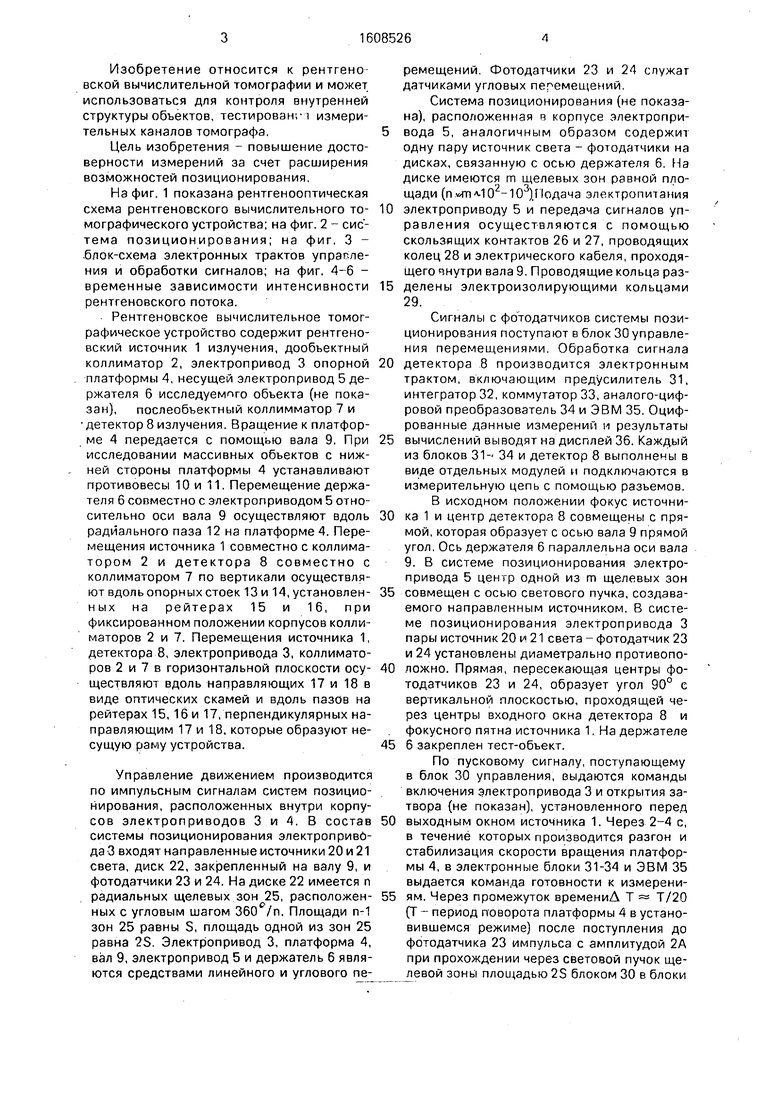
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ВНУТРЕННЕЙ СТРУКТУРЫ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2180439C2 |
| СПОСОБ ЮСТИРОВКИ ОБРАЗЦА В РЕНТГЕНОВСКОМ ДИФРАКТОМЕТРЕ | 2016 |
|
RU2617560C1 |
| Рентгеновский вычислительный томограф | 1980 |
|
SU881590A1 |
| Устройство для рентгенотопографических исследований монокристаллов | 1990 |
|
SU1746268A1 |
| МНОГОКАНАЛЬНЫЙ РЕНТГЕНОВСКИЙ ДИФРАКТОМЕТР | 2002 |
|
RU2216010C2 |
| Оптико-электронное автоколлимационное устройство для измерения профиля полированных поверхностей | 1989 |
|
SU1686305A1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО РЕНТГЕНОФЛУОРЕСЦЕНТНОГО АНАЛИЗА | 2013 |
|
RU2542642C1 |
| РЕНТГЕНОГРАФИЧЕСКАЯ УСТАНОВКА ДЛЯ МЕДИЦИНСКОЙ ДИАГНОСТИКИ | 2007 |
|
RU2352252C1 |
| УСТРОЙСТВО ДЛЯ РЕНТГЕНОФЛУОРЕСЦЕНТНОГО АНАЛИЗА С ПОЛНЫМ ВНЕШНИМ ОТРАЖЕНИЕМ ПЕРВИЧНОГО ИЗЛУЧЕНИЯ | 2006 |
|
RU2315981C1 |
| СПОСОБ ВЫЧИСЛИТЕЛЬНОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ МЕДИЦИНСКОЙ ДИАГНОСТИКИ | 1998 |
|
RU2172137C2 |
Изобретение относится к рентгеновской вычислительной топографии и может использоваться для контроля внутренней структуры объектов, в частности для тестирования измерительных каналов томографа. Цель изобретения - повышение достоверности измерений за счет расширения возможностей позиционирования. Для этого держатель 6 исследуемого объекта с электроприводом 5 его поворота установлен с возможностью перемещения в радиальном пазу 12 платформ 4, которая может поворачиваться на валу 9 от электропривода 5. Источник 1 излучения, детектор 8 излучения и платформа 4 могут перемещаться в продольном направлении по направляющим 17, 18 несущей рамы устройства и в поперечном направлении по пазам рейтеров 15,16 и 19. 6 ил.
Фиг. г
д
--™
сриг.З
J5
20101,отн.ед.
2010IfO/riH.ed.
1,отн.ед.
.
Фиг. 5
« 7с
фиг. 6
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Питательный кран для вагонных резервуаров воздушных тормозов | 1921 |
|
SU189A1 |
| УСТРОЙСТВО ВВОДА, ИСПОЛЬЗУЕМОЕ В ХИРУРГИИ | 1995 |
|
RU2137453C1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| ГРатент Великобритании hi 1538439 кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| f . | |||
