;/
ю
8
со
СП
СО
ФиеЛ
3149597
Изобретение относится к электротехнике, а именно к управляемому синхронному электроприводу, и может быть использовано в различных отрас- г лях промьгашениости при решении задач регулирования частоты вращения нагрузки с высоким качеством.
Цель изобретения - повышение точности и равномерности частоты враще- ю ния.
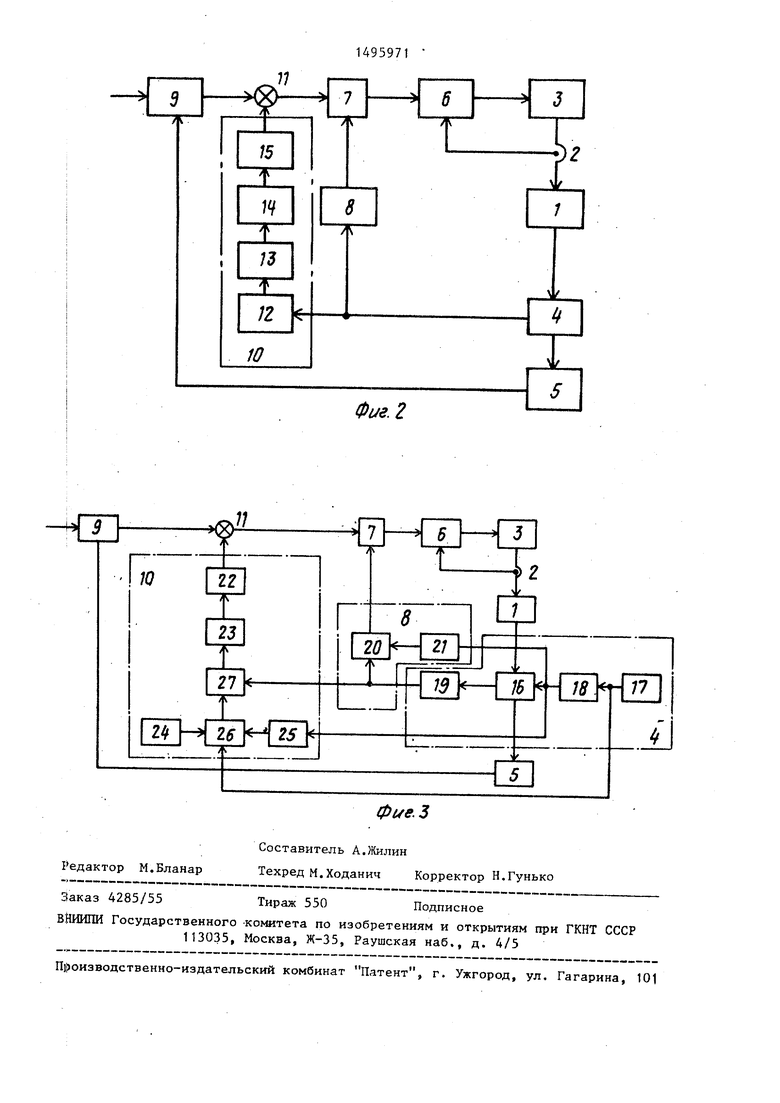
На фиг.1 представлена общая функциональная схема электропривода с синхронным двигателем; на фиг.2 и 3 - схемы электроприводов с различ- 15 ным выполнением формирователя корректирующего напряжения, формировате- ля синусоидальных функций и датчика угла,
Электропривод содержит синхронный 20 двигатель 1 (фиг.1), обмотка статора которого через датчик 2 тока подключена к выходу усилителя 3 мощности, датчик 4 угла и датчик 5- частоты вращения, механически связанные с валом
синхронного двигателя 1, регулятор 6 тока, выход которого подключен к управляющему входу усилителя 3 мощности, умножитель 7, формирователь
8синусоидальных функций и регулятор
9частоты вращения, один из входов которого предназначен для подключения сигнала задания, а другой соединен с ВЫХОД9М датчика 5 частоты вращения, при этом выход датчика 4 угла подключен к входу формирователя синусоидальных функций 8, соединенного выходом с одним из входов умножителя
7, выход которого подключен к одному из входов регулятора 6 тока, сое- диненного другим входом с выходом датчика 2 тока.
В электропривод введены формирователь 10 корректирующего напряжения и сумматор 11, выход которого соеди- нен с другим входом умножителя 7. Один из входов сумматора 11 соединен с вьпсодом регулятора 9 частоты вращения. Другой вход сумматора 11 через формирователь 10 корректирующего нап ряжения подключен к выходу датчика 4 угла.
Датчик 4 угла выполнен в виде кодового датчика положения, а формирователь 10 корректирующего напряжения может быть снабжен последовательно соединенными блоком 12 корректировки фазы (фиг.2), постоянным запоминающим устройством 13, цифроанало
5
0
5
0
5
0
5
0
5
1
говым преобразователем 14 и блокой 15 корректировки амплитуды, выход которого образует выход формирователя 10 корректирующего напряжения. При этом вход блока 12 корректировки фазы образует вход названного формирователя 10.
Датчик 4 угла может быть выполнен с фазовращателем 16 (фиг.З), генератором 17 импульсов, генератором 18 опорных напряжений и формирователем 19 импульсов. При этом формирователь 8. синусоидальных функций . выполнен с устройством 20 выборки-хранения и формирователем 21 опорных синусоид, . а формирователь 10 корректирующего напряжения вьтолнен с цифроаналого- вым преобразователем 22, постоянным запоминающим устройством 23, узлом
24подстройки фазы, формирователем
25импульсов, счетчиком 26 импульсов и буферным регистром 27, вход которого подключен к выходу счетчика 26 импульсов, соединенного входом начальной уставки с выходом узла 24 подстройки фазы, а входом синхронизации - с выходом формирователя 25 импульсов. При этом выход буферного регистра 27 через постоянное запоминающее устройство .3 подключен к входу цифроаналогового преобразователя 22, выход которого образует выход формирователя Ю корректирующего напряжения.
Выход генератора 17 импульсов через генератор 18 опорных напряжений подключен к входу фазовращателя 16, соединенного выходок с вх.одом формирователя 19 импульсов. Выход последнего подключен к входам синхронизации буферного регистра 27 и устройства 20 выборки-хранения, основной вход которого соединен с выходом формирователя 21 опорных синусоид, вход последнего объединен с входом формирователя .25 импульсов и подключен к выходу генератора 18 опорных напряжений, вход которого объединен со счетным входом счетчика 26 импульсов и подключен к выходу генератора 17 импульсов.
В качестве синхронного двигателя 1 может быть использован обычный синхронный двигатель или синхронный двигатель с электромагнитной редукцией частоты вращения. Усилитель 3 мощности представляет собой транзисторный или тирйсторный импульсный
514
преобразователь. Датчик 4 угла может быть выполнен на основе оптического кодирующего преобразователя (фиг.2) или фазовращателя 16 (фиг.З). В качестве датчика 5 частоты вращения может быть использован тахогенератор постоянного тока. Регулятор 6 тока выполняется с релейными регулятора- ми в каждой фазе. В качестве регуля- тора 9 частоты вращения использован пи-регулятор, реализованный на операционном усилителе.
Блок 12 корректировки фазы представляет собой цифровой сумматор, суммирующий начальный код и код с выхода датчика 4 угла. В качестве постоянных запоминающих устройств 13 (фиг.2) и 23 (фиг.З) используются программируемые и репрограммируе- мые устройства. Блок 15 корректировки амплитуды (фиг.2) представляет собой делитель с перестраиваемым коэффициентом деления, реализованный на операционном усилителе. .Генератор 17 импульсов (фиг.З) реализован на основе кварцевого резонатора. Генератор 18 опорных напряжений выполнен на операционных усилителях, а уст
Информация об угловом положении вала двигателя в виде кода с датчика 4 угла (фиг.2) поступает на блок 12 корректировки фазы, где происходит подстройка фазы до требуемого начального кода, с которого необходимо начинать формирование цифрового сигнала на постоянном запоминающем устройстве 13. Требуемое значение сигнала корректировки фазы определяется из условия достижения максимального эффекта компенсации пульсаций скорости, вызванных периодическими изкене-. ниями момента нагрузки на валу двигателя I, что равносильно устранению запаздывания на его отработку в приводе. Постоянное запоминающее устройство 13 в данном случае используется для реализации функциональной зависимости требуемой величины сигнала корректировки по моменту от угла поворота вала двигателя и осуществляет это в виде преобразования кода угла в код задания корректирзтощего момента в соответствии с программой, записанной в нем предварительно в процессе работы привода. Цифровая информация с выхода постоянного запо
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |
| Устройство для управления электродвигателем | 1987 |
|
SU1633475A1 |
| Электропривод переменного тока | 1984 |
|
SU1197032A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| Устройство для управления двигателем переменного тока | 1985 |
|
SU1272461A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 2011 |
|
RU2492505C1 |
Изобретение относится к электротехнике, а именно к управляемому синхронному электроприводу, и может быть использовано в различных отраслях промышленности при решении задач регулирования частоты вращения нагрузки с высоким качеством. Целью изобретения является повышение точности и равномерности частоты вращения. В электропривод введены формирователь корректирующего напряжения 10 с сумматором 11 на выходе, другой вход которого подключен к выходу регулятора частоты вращения 9. При этом обеспечивается дополнительный быстродействующий контур регулирования момента синхронного двигателя 1, работающий в зависимости от углового положения вала, и повышается точность и равномерность частоты вращения. 2 з.п. ф-лы, 3 ил.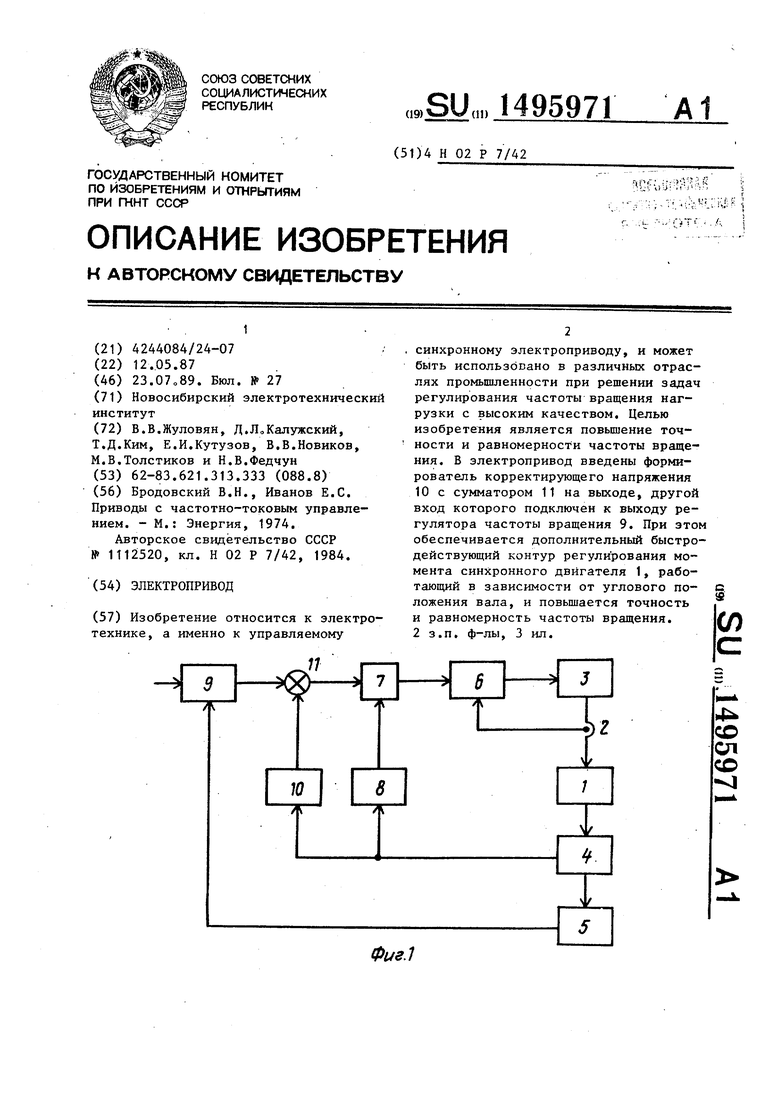
ройство 20 выборки-хранения - на one- 30 минающего-устройства 13 приобретает
рационных усилителях, транзисторе и конденсаторе. Формирователи 19 и 25 импульсов реализованы на полупроводниковых компараторах с дифференцирующими цепями на выходах. Формирователь 21 опорных синусоид вьтолне на операционных усилителях. Узел 24 подстройки фазы представляет собой панель с перемычками.
Электропривод работает следующим образом.
Синхронный двигатель 1 (фиг.1) приводит во вращение нагрузку. Для получения заданной частоты вращения в регуляторе 9 производится сравнение сигнала задания частоты вращения с выходным сигналом датчика 5. На выходе регулятора 9 образуется напряжение, пропорциональное такому значению электромагнитного момента, которое требуется для поддержания частоты вращения двигателя на заданном уровне с определенной ошибкой.
Формирование сигнала задания момента в приводе осуществляется суммированием сигнала с выхода регулятор 9 частоты вращения и сигнала с выход формирователя 10 корректирующего напряжения.
5
0
5
0
5
аналоговую форму после обработки ее в цифроаналоговом преобразователе 14. Полученное напряжение подается на блок 15 корректировки амплитуды, где происходит подстройка уровня корректирующего сигнала. Сигнал задания момента с выхода сумматора -11 поступает на один вход умножителя 7. На второй его вход подаются сигналы с выхода формирователя 8 синусоидальных функций, назначением которого является преобразование кодовой информации о положении вала, получаемой с выхода датчика 4 угла, в соответствующие гармонические напряжения, сдвинутые друг относительно друга
I2
по фазе на угол - (т - число фаз
m
машины). В результате на выходе умножителя 7 имеют синусо1едальные напряжения задания мгновенных значений фазных токов, амплитуды которых пропорциональны скорректированному значению момента с учетом периодических его изменений, а фазы определяются условным положением ротора двигателя.
Вместо кодового датчика углового положения вала двигателя можно использовать фазовращатель. Для полу- чения информации об угловом положении вала двигателя 1 входные обмотки фазовращателя 16 (фиг.З) запитывают- ря синусоидальными напряжениями вы- рокой частоты, сдвинутыми друг от- осительно друга по фазе на угол
-т-, с генератора 18 опорных напряжений, на вход которого подаются импульсы с генератора 17. G выхода фазовращателя 16 синусоидальный сиг- нал высокой частоты, фаза которого |определяется угловым положением вала |двигателя, поступает на формировател |19 импульсов, откуда в моменты :|1ерехода выходного напряжения фа- овращателя через ноль поступают импульсы на вход синхронизации устройства 20 выборки-хранения. Сигналы а основной вход устройства 20 выбор Ци-хранения поступают с выхода фор- Цирователя 21 опорных синусоид в ви- |це гармонических напряжений высокой
1 2 частоты, сдвинутых на угол одно
относительно другого, которые образуются из сигналов генератора 18 опорных напряжений соответствующими пофазными сдвигами. Устройство 20 . выборки-хранения производит вьщеле- ние из высокочастотных гармонических сигналов низкочастотные сигналы, соответствующие угловому положению
21Г
вала со сдвигом - для каждой фаm
зы, которая поступает на умножитель 7.
Формирователь 10 корректирующего напряжения (фиг.З) имеет на входе формирователь 25 импульсов, который вырабатывает импульсы в момент изменения знака напряжения с выхода генератора 18 опорных напряжений и подает их на вход синхронизации счетчика 26 импульсов. В последнем производится счет импульсов, поступающих на его счетный вход с выхода генератора 17 импульсов. Установка начальной фазы в данном случае осуществляется подачей соответствующих сигналов на установочные входы счетчика 26 с выхода узла 24 подстройки фазы. С выхода счетчика 26 импульсов цифровой сигнал поступает на буферный регистр 27, который осуществляет хранение предшествующей информации об угловом положении вала двигателя, а
5
0
5
0
5
0
5
0
5
также ее обновление с каждым новым приходом импульса на его синхронизирующий вход с выхода формирователя 19 импульса. По сигналу с выхода буферного регистра 27 происходит вое- , произведение функциональной зависимости сигнала корректирующего напряжения от углового положения вала в постоянном запоминающем устройстве 23, цифровой сигнал с выхода котброго преобразуется ,в аналоговый с помощью цифрраналогового преобразователя 22. Функции корректировки амплитуды могут быть выполнены с помощью сумматора 11 или цифроаналогового преобразователя 22.
Таким образом, введение в электропривод формирователя корректирующего напряжения и сумматора обеспечивает возможность организации дополнительного быстродействующего контура регулирования момента двигателя, работающего в соответствии с программой в зависимости, от углового положения вала двигателя. При этом устраняются ошибки по частоте вращения, обусловленные инерцией контура регулирования при отработке периодических возмущений, действующих на вал двигателя, что позволяет в сравнении с известным электроприводом повысить точность и равномерность частоты вращения.
Формула изобретения
целью повышения точности и равномерности-частоты вращения, введены формирователь корректирующего напряжения и сумматор, выход которого соединен с другим входом умножителя, один из входов сумматора соединен с выходом регулятора частоты вращения, а другой вход через формирователь корректирующего напряжения подключен к выходу датчика угла.
вход формирователя корректирующего напряжения,
выходами и выполнен с фазовращателем,,Q устройства выборки-хранения, выход
генератором импульсов, генератором опорных напряжений и формирователем импульсов, причем выход формирова- теля импульсов образует основной выход датчика угла, .а выходы генератора импульсов и генератора опорных напряжений - первый и второй дополнительные Ъыходы датчика угла, формирователь синусоидальных функций снабжен дополнителным входом и вьтолнен с устройством выборки-хранения и формирователем опорных синусоид, вход которого образует дополнительный
35
40
генератора импульсов в датчике угла через генератор опорных.напряжений подключен к входу фазовращателя, со единенного выходом с входом формиро вателя импульсов, первый и второй д полнительные выходы датчика угла по ключены соответственно к первому и второму дополнительным входам формирователя корректирующего напряжения, а дополнительный вход формиров теля синусоидальных функций подключ к второму дополнительному выходу да чика угла.
вход формирователя синусоидальных функций, основной вход и,выход .которого образованы входом синхронизации и выходом устройства выборки- хранения, формирователь корректирующего напряжения снабжен двумя дополнительными входами и выполнен с формирователем импульсов, узлом подстройки фазы и последовательно соединенными счетчиком импульсов, буферным регистром, постоянным запоминающим устройством и цифроаналого- вым преобразователем, выход которого образует выход формирователя корректирующего напряжения, основной вход и два дополнительных входа которого образованы соответственно входом синхронизации буферного регистра, счетным входом счетчика импульсов и входом формирователя импульсов, при этом вход начальной установки счетчика импульсов соедине с выходом узла подстройки фазы, а вход синхронизации счетчика импульсов - с выходом формирователя импульсов в формирователе корректирующего напряжения, выход формирователя опорных синусоид подключен к входу
5
0
генератора импульсов в датчике угла через генератор опорных.напряжений подключен к входу фазовращателя, соединенного выходом с входом формирователя импульсов, первый и второй дополнительные выходы датчика угла подключены соответственно к первому и второму дополнительным входам формирователя корректирующего напряжения, а дополнительный вход формирователя синусоидальных функций подключен к второму дополнительному выходу датчика угла.
| Бродовский В.В., Иванов Е.С | |||
| Приводы с частотно-токовым управлением | |||
| - М.: Энергия, 1974 | |||
| Электропривод | 1983 |
|
SU1112520A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
