Изобретение относится к электротехнике, в частности к электроприводам и системам автоматического управления, и может быть использовано в тихоходных электроприводах с широким диапазоном регулирования частоты вращения.
Цель изобретения - повышение точности регулирования частоты вращения и упрощение.
На фиг. 1 изображена функциональная схема вентильного электропривода; на фиг. 2 - вариант выполнения датчика частоты вращения.
Вентильный электропривод реализован на базе, вентильного электродвигателя 1 ,и срдержит двухфазную синхронную машину 2, первый 3 и второй 4 блоки умножения, первые входы которыхобъединены. Выходы первого 3, второго 4 блоков умножения подключены через усилители 5 и 6 мощности соответственно к синусной 7 и косинусной
8фазам обмотки якоря синхронной машины 2. Вентильный электродвигатель 1 со держит также датчик 9 положения ротора, установленнь1й на валу ротора синхронной машины 2, синусная 10 и косинусная 11 выходные обмотки которого подключены через первый 12 и второй 13 фазочувствитёльные выпрямители к вторым входам соответственно первого 3 и второго 4 блоков умножения. Кроме того, вентильный электродвигатель 1 включает в себя источник 14 напряжения возбуждения, выход которого подключен к обмотке возбуждения датчика
9поло кения и через формирователь 15 опорного напряжения к опорным входам фазочувствительных выпрямителей 12 и 13, и задатчик 16 частоты вращения, выход которого подключен к первому входу блока 17 сравнения, второй вход которого соединен с выходом датчика 18 частоты вращения, а выход - через предварительный усилитель 19 -с первыми входами первого 3 и второго 4 блоков умножения. Выходы первого 12 и второго 13 фазочувствительных выпрямителей подключены к первому и второму входам датчика 18 частоты вращения. Датчик 18 частоты вращения состоит из двух алгебраических сумматоров 20 и 21 и первого 22 и второго 23 блоков умножения. Выходы первого 22 и второго 23 блоков умножения подключены соответственно к первому и второму входам первого алгебраического сумматора 20.
Кроме того, датчик 18-частоты может содержать первое 24 и второе 25 апериодические звенья, третий 26 и четвертый 27 блоки умножения и блок 28 деления, причем входы делителя 29 и делимого 30 блока 28 деления подключены к выходам первого 20
и второго 21 алгебраических сумматоров, а выход блока 28 деления образует выход датчика 18 частоты вращения. Выход первого алгебраического ЗЕсена 24 подключен к первым входам первого 22 и третьего 26 блоков умножения датчика 18 частоты вращения, а вход - соединен с вторыми входами третьего 26 и второго 23 блоков умножения и образует первый, вход датчика 18 частоты
0 вращения. Выход второго апериодического звена 25 подключен к первым входам второго 23 и четвертого 18 блоков умножения датчика 18 частоты вращения, а вход соединен с вторыми входами первого 22 и четвертого 27 блоков умножения и образует второй вход датчика 18 частоты вращения. Выходытретьего 26 и четвертого 27 блоков умножения подключены соответственно к первому и второму входам второго алгебра0 ического сумматора 21.
Вентильный электропривод работает следующим образом.
Задатчик 16 вырабатывает сигнал заданной частоты вращения вентильного
5 электродвигателя, который в блоке 17 сравнивается с выходным сигналом датчика 18 частоты вращения. Сигнал ошибки с выхода блока 17 сравнения, усиленный в предварительном усилителе 19, поступает в виде на0 пряжения постоянного тока на вход вентильного электродвигателя 1. На обмот. ку возбуждения датчика 9положения с выхода источника 14 напряжения возбуждения подается переменное напряжение синусоидальной формы, например,частотой 2 кГц, врезультате чего на синусной 10 и косинусной 11 выходных обмотках датчика 9 положения появляются синусоидальные напряжения той же частоты, но
0 промодулированные по амплитуде соответственно синусоми косинусом электрического угла поворота ротора датчика 9 положения, или электрического угла поворота ротора синхронной машины 2, отсчиты5 ваемого от некоторой неподвижной оси, связанной со статором синхронной машины. Эти напряжения поступают на входы фазочувствительных выпрямителей 12 и 13. Формирователь 15 опорного напряжения преобразует синусоидальйое напряжение, поступающее с выхода источника 14 напряжения возбуждения, в напряжение прямоугольной формы, которое подается на опорные входы фазочувствительных выпрямителей 12 и 13. В результате на выхоДах этих выпрямителей формируются напряжения постоянного тока, пропорциональные; синусу и косинусу электрического угла поворота двигателя. Эти напряжения, умноженные в блоках 3 и 4 умножения на входное напряжение двигателя и усиленные в усилителях 5 и 6 мощйости, преобразуются в напряжения, приложенные к сдвинутым друг относительно друга на 90 эл. град, фазам якорной обмотки синхронной машины 2. При этом в расточке статора машины возникает результирующая МДС, вектор которой, представляющий собой сумму векторов МДС синусной и косинусной фаз, направлен под углом pv. оси отсчета углов и, таким образом, жестко связан с ротором синхронной машины 8. Установленные на роторе постоянные магниты (либо полюсы с обмоткой возбуждения) ориентированы так, что вектор их МДС перпендикулярен вектору МДС якорной обмотки. Как известно, при такой ориентации полей электромагнитный момент, приложенный к ротору двигателя, максимален. Под действием этого момента ротор вращается, а вместе с ним вращается и вектор МДС якорной обмотки, а также вектор МДС возбуждения синхронной машины 2. Поскольку при этом взаимная ориентация названных векторов не меняется, значение момента двигателя, как и в обычном коллекторном двигателе постоянного тока, не зависит от углового положения ротора и определяется фазными токами обмотки якоря, определяемыми разностью между фазными напряжениями, пропорциональными входному (управляющему) напряжению вентильного электродвигателя 1, и противоЭДС, пропорциональной частоте вращения. Благодаря действию отрицательной обратной связи по частоте вращения, реализуемой с помощью датчика 16, значение частоты вращения двигателя поддерживается равным заданному путем воздействия на входное напряжение двигателя. Датчик 16 частоты вращения в предлагаемом вентильном электроприводе работает следующим образом. При работе вентильного электропривода на выходах фазочувствительных выпрямителей 12 и 13 формируются напряжения, описываемые уравнениями: Ui UoSinmu t; U2 UoCosm(y t, Uo KlK2Uym;
где KI - коэффициент передачи датчика 9 положения;
Ка - коэффициент передачи фазочувствительного выпрямителя, 12 и 13;
U2°Kcos arccos :
-/1 +(ma)lY Uym - амплитуда переменного напряжения источника 14; m - число пар полюсов синхронного двигателя 3 и датчика 9 положения; (У - частота вращения ротора синхронного двигателя 2; О) 1 0:-угол поворота ротора синхронного двигателя 2. Передаточная функция апериодических звеньев 24 и 25 имеет следующий вид: где Кз- коэффициент передачи апериодических звеньев 24 и 25; Т - постоянная времени апериодических звеньев 24 и 25; Р ТГГ символ дифференцирования. Пройдя через апериодические звенья 24 и 25, напряжения Ui и U2, снимаемые с выходов фазочувствительных выпрямителей 12 и 13, преобразуются в напряжения Уз и из UoK3Sin(m(y t-); U4 UoK3COs(), где /3 arctg тш Т - сдвиг по фазе между выходным и входным напряжением апериодических звеньев 24 и 25. Напряжения на выходе четвертого 27, первого 22, второго 23 и третьего 26 блоков умножения U5 K4U2U4 -j- Uo K|:cos;S+cos(2m(t-): U6 IOiU2U3 Uo K -sinjS-i-sln(): -5- Uo K sinjS+sin(2ma)t-y3); U8 K4UiU3 -5- (cq/3s -С05(2тш t-yS). где K4 - коэффициент передачи умножителей, - общий коэффициент усиления. Напряжение Ug на выходе сумматора 21 равно сумме выходных напряжений третьего 26 и четвертого 27 умножителей U9 U5+U8 UoK-COS/ Uo K-cos arctg mftjT
- Uo К
fl +()2 где arctg majT arccos
/1 +(m
Напряжение Uio на выходе сумматоравычитателя 20 равно разности выходных напряжений второго 23 и первого 22 умножителей
Uio U7-U6-Uo Ksin/5
-Uo К sin arctg ma)T
m шТ
Do Ksin arcsin
y1 +{mwT)2
m () Т
(6)
1 +(mwTf
. Блок 28 деления вычисляет отношение напряжений (6) и (5)
Uio
(7)
: m w Т KG ш , Ug
где Uii - выходное напряжение блока 28 деления;
Т - коэффициент датчика 18 частоты вращения.
Таким образом, благодаря совместной работе апериодических звеньев 24 и 25, умножителей 22, 23 и 26, 27, алгебраических сумматоров 20 и 21 и блока 28 деления на выходе датчика 18 вырабатывается сигнал, пропорциональный частоте вращения вентильного электродвигателя 1.
В тихоходных безредукторных моментных приводах, у которых (muJT).«1 в качестве выходного напряжения датчика 28 может быть использовано напряжение Uio сумматора-вычитателя 20
m ft; Т
(8)
К
у 1 + ( m ш Т )
Для расчета параметров системы автоматического регулирования возможно пользоваться упрощенным уравнением такого датчика частоты вращения, которое получается из уравнения (8) путем пренебрежения слагаемым (mwТ)
(9)
где KmT - коэффициент датчика частоты, вращения.,
Ошибка в определении частоты вращения определяется выражением:
5 Uio -Ulo .-.„
1 -V +(талу}- 100 . %
(10)
Так, например, при ,030 с и в иапазоне скоростей от О доли 1,33 1/с ошибка составляет от О до-5%.
На фиг. 2 представлена функциональная схема упрощенного датчика 18 частоты вращения.
Сигнал, пропорциональный частоте вращения вентильного электродвигателя 1, может быть получен с достаточной степенью точности при помощи апериодических звеньев 24 и 25, умножителей 22 и 23 и алгебраического сумматора 20.
Таким образом, выделение сигнала, пропорционального частоте вращения вентильного электродвигателя, без использования тригонометрических функциональных преобразователей, моделей или дополнительных датчиков параметров электродвигателя позволяет повысить точность
регулирования частоты вращения и упростить вентильный электропривод.
Формула изобретения Вентильный электропривод, содержащий двухфазную синхронную машину, первый и второй блоки умножения, первые входы которых объединены, а выходы через усилители мощности подключены соответственно к синусной и косинусной фазам обмотки якоря синхронной машины, датчик положения ротора, установленный на валу ротора синхронной машины, синусная и косинусная выходные обмотки которого подключены через первый И второй
фазочувствительные выпрямители к вторым входам соответственно первого и второго блоков умножения, источник напряжения, выход которого подключен к обмотке возбуждения датчика положения ротора, и через формирователь опорного напряжения к опорным входам фазочувствительных выпрямителей, задатчик частоты вращения, выход которого подключен к первому входу блока сравнения, второй вход которого подключен к выходу датчика частоты вращения, а выход подключен через предварительный усилитель к первым входам первого и второго блоков умножения, выходы первЬго и второго фазочувствительных выпрямителей подключены к первому и второму входам
датчика частоты вращения,составленного из двух алгебраических сумматоров и первого и второго блоков умножения, выходы которых подключены к соответствующим входам первого алгебраического сумматора, о т л и ч а ю щ и и с я тем, что, .с целью повышения точности регулирования частоты вращения и упрощения, датчик частоты вращения вентильного электропривода дополнительно снабжен первым и вторым апериодическими звеньями, третьим и четвертым блоками умножения и блоком деления, входы делителя и делимого которого подключены соответственно к выходам первого и второго алгебраических сумматоров, а выход образует выход датчика частоты вращения.
причем выход первого апериодического звена подключен к первым входам первого и третьего блоков умножения датчика частоты вращения, а вход соединен с вторыми входами третьего и второго блоков умножения и образует первый вход датчика частоты вращения, выход второго апериодического звена подключен к первым входам второго и четвертого блоков умножения датчика ча0стоты вращения, а вход соединен с вторыми входами первого и четвертого блоков умножения и образует второй вход датчика ча&тоты вращения, третьего и четвертого блоков умножения подклю5чены соответственно к первому и второму входам второго алгебраического сумматора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Вентильный электропривод | 1989 |
|
SU1676053A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
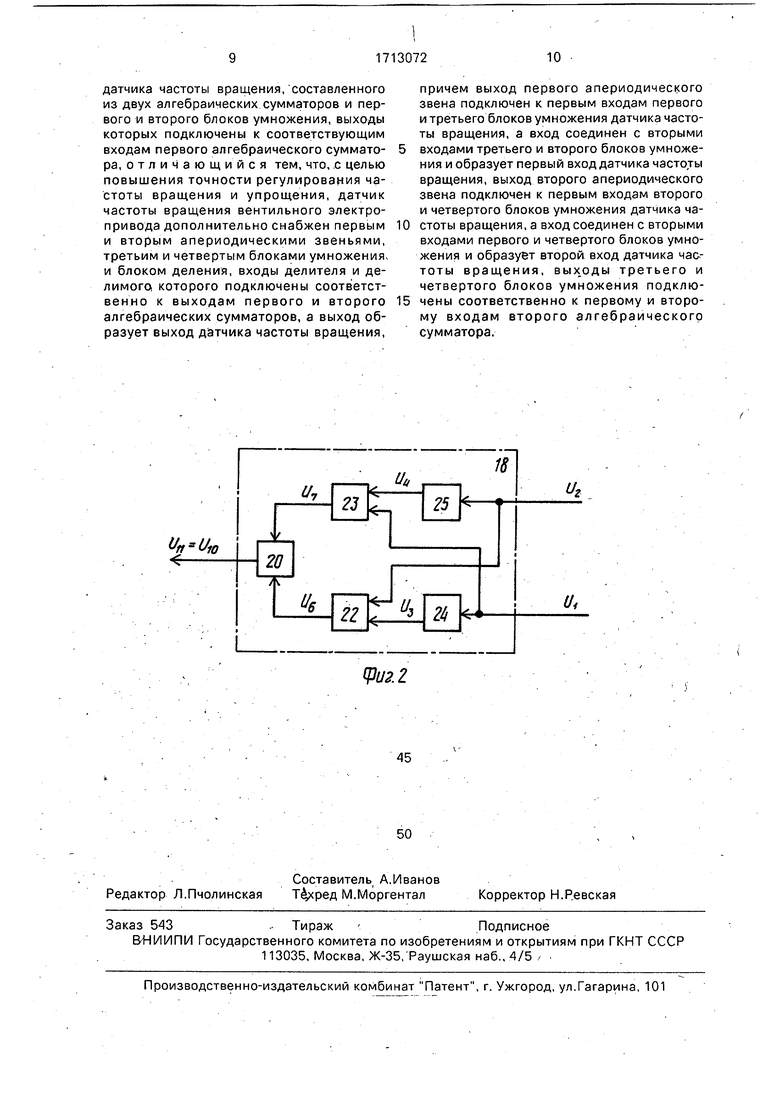
Изобретение относится к электротехнике и может быть использовано в тихоходных электроприводах с широким диапазоном регулирования частоты вращения. Цель изобретения - повышение точности регулирования частоты вращения и упрощение - достигается за счет более точного определения фактической частоты враще* ния. Для этого в датчике 18 частоты вращения апериодические звенья 24 и 25 подключены к выходам фазочувствительных выпрямителей 12 и 13 вентильного электропривода, а выходы и входы апериодических звеньев 24 и 25 соответствующим образом подключены к четырем блокам умножения 22, 23 и 26, 27, выходы которых попарно подключены к алгебраическим сумматорам 20 и 21, выходы которых подключены к блоку 28 деления. 2 ил.(Лс-^4СОо ^hO>&фиг.^
IPU22
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
