Ч
Ai.
JLi
16п f
:
5
5
я
±L
Г
3
iA
ю li
Xj
-ь
5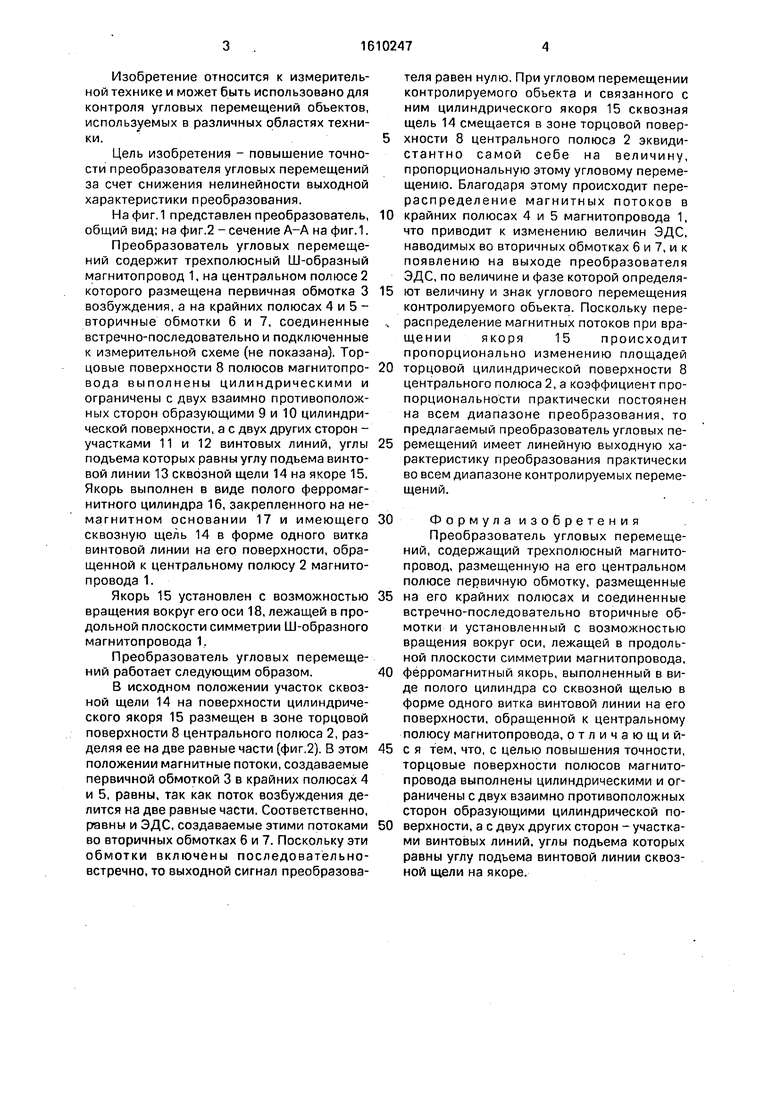
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловых перемещений | 1989 |
|
SU1768950A1 |
| Преобразователь угловых перемещений | 1988 |
|
SU1516762A1 |
| Преобразователь угловых перемещений | 1989 |
|
SU1677505A1 |
| Датчик угловых перемещений | 1989 |
|
SU1768948A1 |
| Преобразователь угловых перемещений | 1983 |
|
SU1146545A1 |
| Бесконтактный преобразователь угла поворота | 1989 |
|
SU1690109A1 |
| Бесконтактный преобразователь угла поворота | 1991 |
|
SU1814160A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| Трансформаторный датчик угловых перемещений | 1981 |
|
SU974110A1 |
Изобретение относится к измерительной технике и имеет целью повышение точности трансформаторного преобразователя угловых перемещений, содержащего Ш-образный магнитопровод 1, на центральном полюсе 2 которого размещена первичная обмотка 3, а на крайних полюсах 4 и 5 размещены последовательно-встречно включенные вторичные обмотки 6 и 7. В продольной плоскости симметрии магнитопровода 1, перпендикулярно полюсам 2, 4 и 5 расположена ось 18 вращения якоря 15, выполненного в виде полого ферромагнитного цилиндра 16, имеющего на поверхности, обращенной к центральному полюсу 2 магнитопровода, сквозную щель 14 в форме одного витка винтовой линии 13. Торцовые поверхности 8 полюсов магнитопровода выполнены цилиндрическими и ограничены двумя образующими и двумя участками винтовых линий с углами подъема, равными углу подъема винтовой линии 13 сквозной щели 14 на якоре 15. Благодаря этому происходит пропорциональное угловому перемещению якоря 15 перераспределение магнитного потока возбуждения между крайними полюсами 4 и 5 магнитопровода 1, что обусловливает более высокую линейность выходной характеристики преобразования угловых перемещений во всем диапазоне измерения. 2 ил.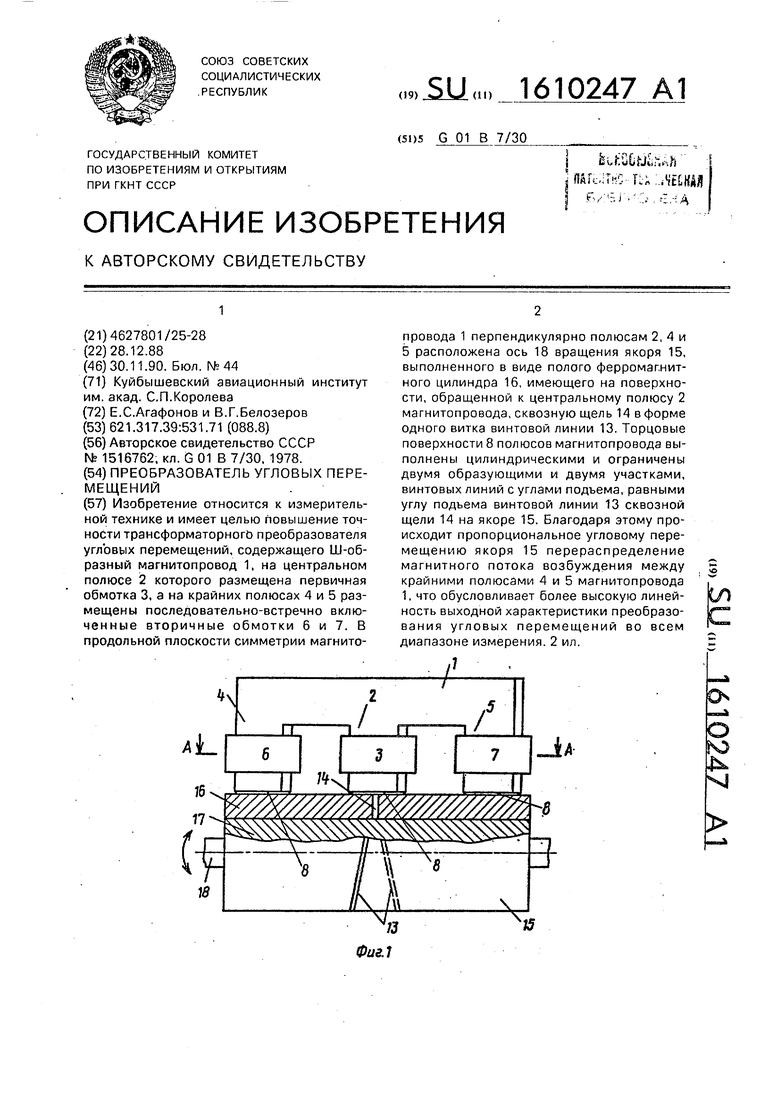
18
Изобретение относится к измерительной технике и может быть использовано для контроля угловых перемещений объектов, используемых в различных областях техники.
Цель изобретения - повышение точности преобразователя угловых перемещений за счет снижения нелинейности выходной характеристики преобразования.
На фиг. 1 представлен преобразователь, общий вид; на фиг.2 - сечение А-А на фиг. 1.
Преобразователь угловых перемещений содержит трехполюсный Ш-образный магнитопровод 1, на центральном полюсе 2 которого размещена первичная обмотка 3 возбуждения, а на крайних полюсах 4 и 5 - вторичные обмотки 6 и 7, соединенные встречно-последовательно и подключенные к измерительной схеме (не показана). Торцовые поверхности 8 полюсов магнитопро- вода выполнены цилиндрическими и ограничены с двух взаимно противоположных сторон образующими 9 и 10 цилиндрической поверхности, а с двух других сторон - участками 11 и 12 винтовых линий, углы подъема которых равны углу подъема винтовой линии 13 сквозной щели 14 на якоре 15. Якорь выполнен в виде полого ферромагнитного цилиндра 16, закрепленного на немагнитном основании 17 и имеющего сквозную щель 14 в форме одного витка винтовой линии на его поверхности, обращенной к центральному полюсу 2 магнито- провода 1.
Якорь 15 установлен с возможностью вращения вокруг его оси 18, лежащей в продольной плоскости симметрии Ш-образного магнитопровода 1.
Преобразователь угловых перемещений работает следующим образом.
В исходном положении участок сквозной щели 14 на поверхности цилиндрического якоря 15 размещен в зоне торцовой поверхности 8 центрального полюса 2, разделяя ее на две равные части (фиг.2). В этом положении магнитные потоки, создаваемые первичной обмоткой 3 в крайних полюсах 4 и 5, равны, так как поток возбуждения делится на две равные части. Соответственно, равны и ЭДС, создаваемые этими потоками во вторичных обмотках 6 и 7. Поскольку эти обмотки включены последовательно- встречно, то выходной сигнал преобразователя равен нулю. При угловом перемещении контролируемого объекта и связанного с ним цилиндрического якоря 15 сквозная щель 14 смещается в зоне торцовой поверхности 8 центрального полюса 2 эквидистантно самой себе на величину, пропорциональную этому угловому перемещению. Благодаря этому происходит перераспределение магнитных потоков в
крайних полюсах 4 и 5 магнитопровода 1, что приводит к изменению величин ЭДС, наводимых во вторичных обмотках 6 и 7, и к появлению на выходе преобразователя ЭДС, по величине и фазе которой определяют величину и знак углового перемещения контролируемого объекта. Поскольку пере- распределение магнитных потоков при вращении якоря 15 происходит пропорционально изменению площадей
торцовой цилиндрической поверхности 8 центрального полюса 2, а коэффициент пропорциональности практически постоянен на всем диапазоне преобразования, то предлагаемый преобразователь угловых перемещений имеет линейную выходную характеристику преобразования практически во всем диапазоне контролируемых перемещений.
Формулаизобретения
Преобразователь угловых перемещений, содержащий трехполюсный магнитопровод, размещенную на его центральном полюсе первичную обмотку, размещенные
на его крайних полюсах и соединенные встречно-последовательно вторичные обмотки и установленный с возможностью вращения вокруг оси, лежащей в продольной плоскости симметрии магнитопровода,
ферромагнитный якорь, выполненный в виде полого цилиндра со сквозной щелью в форме одного витка винтовой линии на его поверхности, обращенной к центральному полюсу магнитопровода, отличающийс я тем, что, с целью повышения точности, торцовые поверхности полюсов магнитопровода выполнены цилиндрическими и ограничены с двух взаимно противоположных сторон образующими цилиндрической поверхности, а с двух других сторон - участками винтовых линий, углы подъема которых равны углу подъема винтовой линии сквозной щели на якоре.
А-А
| Преобразователь угловых перемещений | 1988 |
|
SU1516762A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
