Изобретение относится к измерительной технике и может быть использовано для измерения угловых перемещений объектов.
Цель изобретения - сокращение длительности и упрощение настройки и регулированиячувствительностипреобразователя угловых перемещений посредством плавного регулирования величи- ны воздушных зазоров в его магнитопроводе.
На чертеже представлен преобразователь угловых перемещений, общий вид.
Преобразователь угловых перемещений содержит неподвижный Ф-образный магнитопровод 1, на центральном стержне 2 которого размещена первичная обмотка 3 возбуждения. На боковых стержнях 4, имеющих полукольцевую форму, размещены вторичные обмотки 5. Первичная обмотка 3 подключена к источнику питания переменного тока (не показан), а вторичные обмотки 5 соединены последовательно-встречно и подключены к измерительной схеме (не показана). Боковые стержни 4 полукояьцевой формы выполнены в виде заглушенных с обоих концов полых упругих трубок 6 из ферромагнитного материала, заполненных ферромагнитной жидкостью 7, которая представляет собой коллоидный раствор частиц магнитного материала (например, железа, кобальта, магнетита, феррита и т.п.) в диэлектрической жидкости-носителе, например в масле. Каждая частица представляет собой .магнитный домен размером см. Объемная концентрация частиц составляет 60-80%, Каждый боковой стержень 4 снабжен механизмом 8 изменения давления жидкости в полостях упругих трубок 6, который выполнен в виде цилиндра 9 с поршнем 10, входящим в полость этих трубок. Механизмы 8 изменения давления жидкости установлены на боковых стержнях с сохранением герметичности полостей упругих трубок 6. В магнитопроводе 1 выполнен зазор 11 между его центральным 2 и боковыми 4 стержнями, в котором размещен своим периферийным участком ферромагнитный якорь, выполненный в виде полого цилиндра 12 со сквозной щелью 13 на его поверхности в форме одного витка винтовой линии. Ось 14 вращения полого цилиндра 12 перпендикулярна оси 15 симметрии неподвижного магнитол ровода 1.
Преобразователь угловых перемещений работает следующим образом.
После установки преобразователя на объект и подключения его к источнику питания и измерительной схеме производится настройка преобразователи для компенсации начального выходного сигнала а нулевом положении якоря, указанном на чертеже. Настройка производится механизмами 8 изменения давления жидкости 7 в полостях упругих трубок 6. При вворачивании
поршня 10 в полость трубки 6 в ней создается избыточное давление, под действием которого свободный конец стержня 4 отходит от торцовой поверхности цилиндра 12, увеличивая зазор между ними. Увеличение
0 этого зазора приводит к уменьшению магнитного потока через этот стержень, что приводит к выравниванию ЭДС на вторичных обмотках 5 и получению нулевого сигнала на выходе преобразователя.
5 Уменьшение зазора (при выведении поршня 10 из полости) приводит к увеличению магнитного потока через соответствующий боковой стержень 4 магнитопровода и увеличению ЭДС размещенной на нем вторич0 ной обмотки 5. При одновременном перемещении поршней 10 в одну и ту же сторону зазоры изменяются под обоими стержнями 4, позволяя механическим путем регулировать (подстраивать) чувствитель5 ность преобразователя угловых перемещений. После настройки и регулирования чувствительности магнитные потоки, создаваемые первичной обмоткой 3 в боковых стержнях 4, в исходном положении якоря
0 равны. Соответственно равны и ЭДС, наводимые во вторичных обмотках 5 преобразователя. Поэтому сигнал на его выходе равен нулю, что соответствует начальному нулевому положению якоря и связанного с «им
5 объекта. При повороте якоря вокруг оси 14 щель 13 на его поверхности перемещается параллельно самой себе, площади зазоров под стержнем 2 изменяются, поэтому изменяются У ЕРДИЧИНЫ магнитных потоков, про0 ходящих через боковые стержни 4, так как один из них увеличивается, а другой - уменьшается. Это приводит к появлению на выходе преобразователя сигнала, изменяющегося линейно пропорционально углу по5 ворота якоря. Фаза выходного сигнала указывает направление перемещения якоря - цилиндра 12 и, соответственно, объекта.
Выполнение боковых стержней магнитопровода в виде полых упругих трубок, за0 полненных ферромагнитной жидкостью и снабженных механизмами изменения давления жидкости, позволяет значительно упроститьпроцесснастройкипреобразователя угловых перемещений при
5 компенсации начального выходного сигнала преобразователя, а также сократить время настройки не менее чем в 3-15 раз. Формула изобретения Преобразователь угловых перемеще- ний. содержащий Ф-образный магнитопровод с зазором между центральным и боковыми стержнями, размещенную на центральном стержне первичную обмотку, размещенные на боковых стержнях и соединенные последовательно-встречно вторичные обмотки и установленный в зазоре магнитопровода с возможностью вращения вокруг оси, перпендикулярной оси симметрии магнитопровода, ферромагнитный якорь, выполненный в виде полого цилинд
ра со сквозной щелью в форме одного витке винтовой линии на его поверхности, о т л и- ч а.ю щ и и с я тем, что, с целью сокращения длительности и упрощения настройки и регулирования чувствительности, каждый боковой стержень магнитопровода выполнен в виде глухой полой упругой трубки, заполненной ферромагнитной жидкостью и снабженной механизмом измерения давления жидкости в ней.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловых перемещений | 1989 |
|
SU1768950A1 |
| Преобразователь угловых перемещений | 1988 |
|
SU1516762A1 |
| Датчик угловых перемещений | 1989 |
|
SU1768948A1 |
| Преобразователь угловых перемещений | 1983 |
|
SU1146545A1 |
| Преобразователь угловых перемещений | 1988 |
|
SU1610247A1 |
| Электротрансформатор для работы в резонансном режиме, а также в составе статора электрогенератора | 2021 |
|
RU2770049C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УДАРНОГО ДЕЙСТВИЯ | 2013 |
|
RU2531701C1 |
| Амортизатор на основе линейного электродвигателя | 2021 |
|
RU2763617C1 |
| Бампер транспортного средства с активным ударогашением | 2017 |
|
RU2674735C1 |
| УСТРОЙСТВО ДЛЯ ВИБРОПЕРЕМЕШИВАНИЯ ЖИДКОСТЕЙ | 1991 |
|
RU2034641C1 |
Изобретение относится к измерительной технике. Цель - сокращение длительности и упрощение настройки и регулирования чувствительности преобразователя угловых перемещений. Преобразо- ватель содержит Ф-образный магнитопровод 1, на центральном стержне 2 которого размещена первичная обмотка 3, а на полукольцевых боковых стержнях 4 размещены вторичные обмотки 5, соединенные последовательно-встречно. Боковые стержни 4 выполнены в виде заглушенных с обоих концов полых упругих трубок 6, заполненных ферромагнитной жидкостью 7. Каждый боковой стержень 4 снабжен механизмом 8 изменения давления жидкости 7 в полостях упругих трубок 6. В магнитопроводе 1 выполнен зазор 11, в котором размещен своим периферийным участком ферромагнитный якорь, выполненный в виде полого цилиндра 12 со сквозной щелью 13 в его стенке, имеющей форму одного витка винтовой линии. Механизм 8 изменения давления выполнен в виде цилиндра 9 с поршнем 10, входящим в полость упругих трубок 6. 1 ил. 10 & Ё Os VI VI ел о ел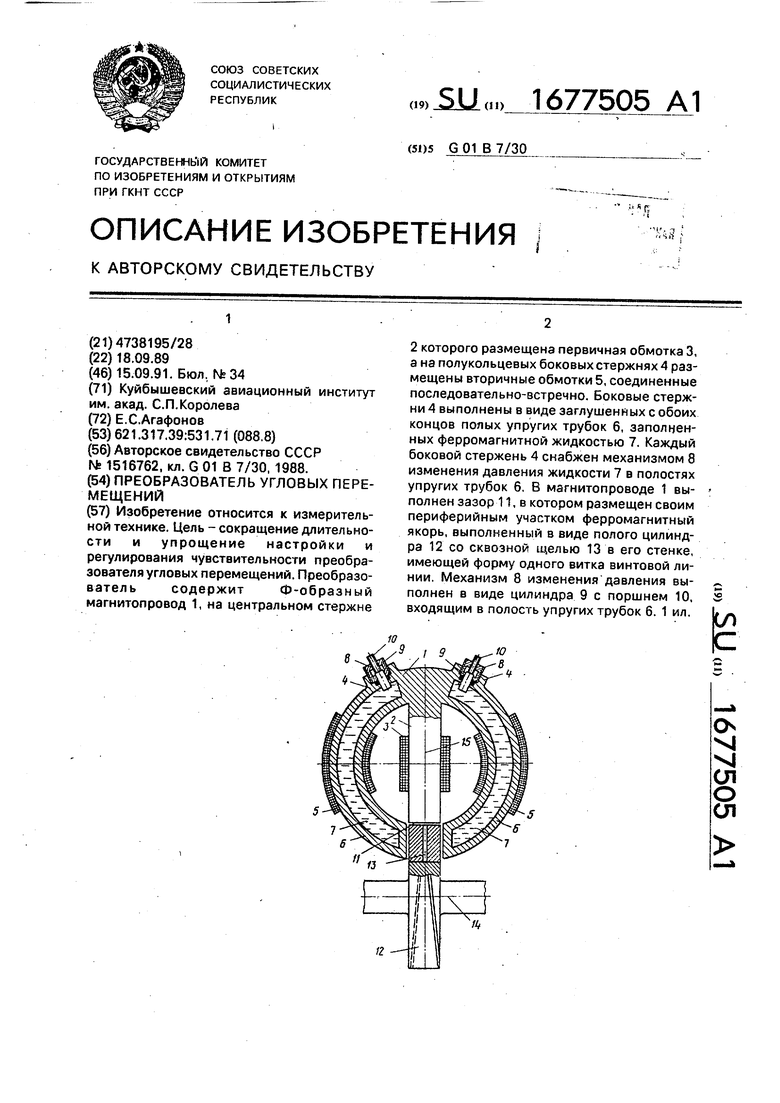
| Преобразователь угловых перемещений | 1988 |
|
SU1516762A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
