Изобретение относится к навигационному приборостроению и может быть использовано для устранения полукруговой девиации индукционных компасов, установленных на транспортном, средстве, например, авиационных или морских компасов.
Целью изобретения является повышение быстродействия устройства.
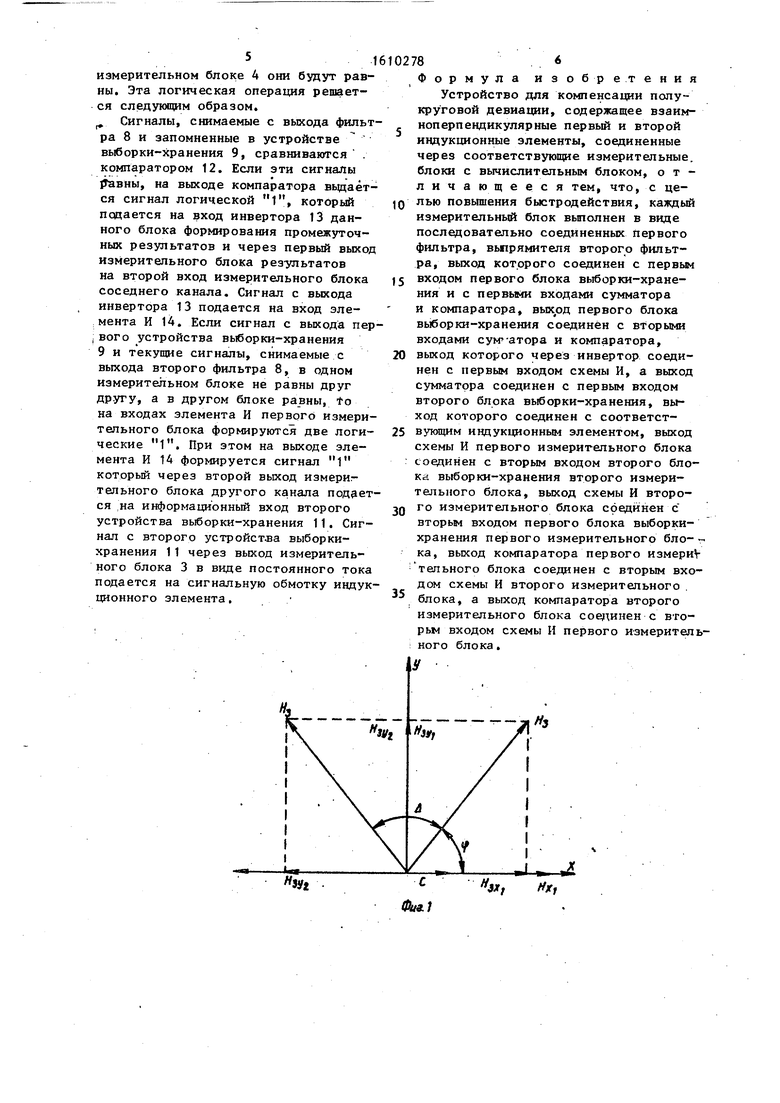
На фиг. 1 представлена векторная диаграмма, поясняющая сущность методики определения величины коэффициентов полукруговой девиации; на фиг. 2 - структурная схема устройст31
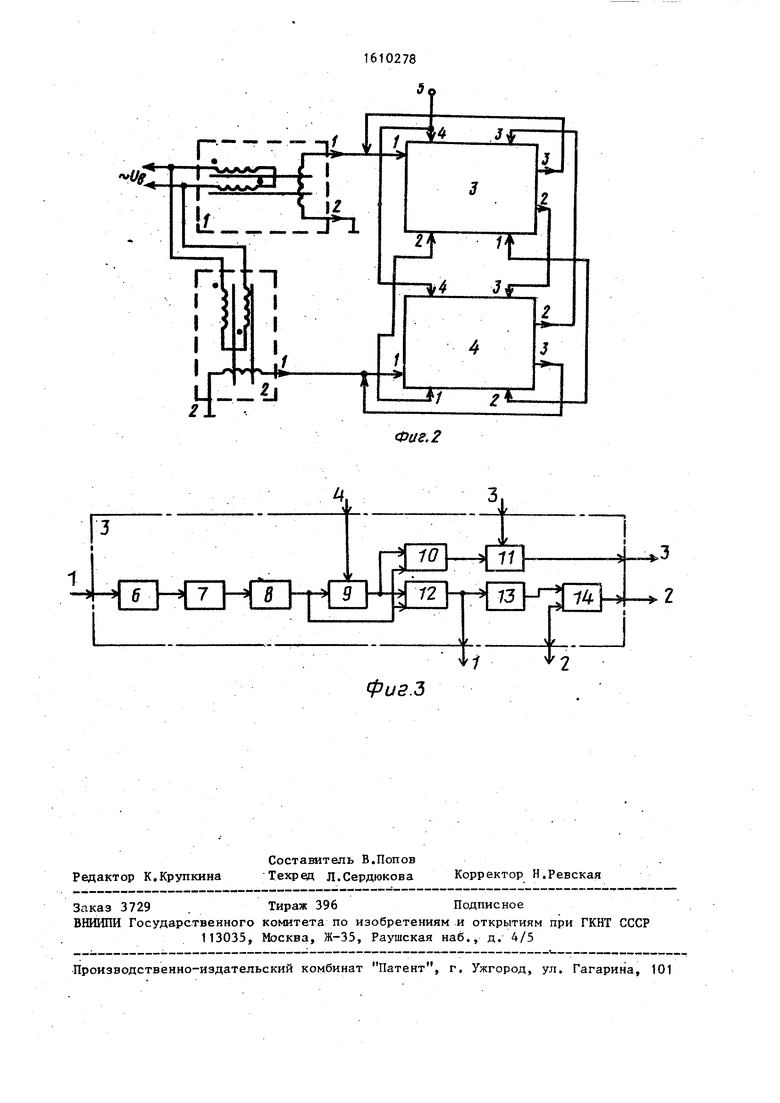
ва для компенсации полукруговой девиации; на фиг. 3 - структурная схема измерительного блока.
Устройство для устранения полукруговой девиации фиг.2) содержит взаимно перпендикулярные элементы 1 я 2 с обмотками возбуждения и сигнальной, два измерительных блока 3 и 4 и вход импульса запуска 5.
Измерительный блок (фиг.З) состоит из первого фильтра в, выпрямителя 7, второго фильтра 8, первого устройства выборки-хранения 9, сумматора 10, второго устройства выборки-хранения И, компаратора 12, инвертора 13 и элемента И. 1. Выходы сигнальных обмоток индукционных элементов 1 и 2 соединены с входами блока формирования промежуточных результатов, т.е. с входом первого фильтра 6, выход которого соединен с входом прямителя 7, а выход вьшрямителя 7 - с входом второго фильтра 8, выход второго фильтра соединен с информационным входом первого устройства выборки-хранения 9, с первым входом сумматора 10, с первым входом компаратора 12, четвертый вход измерительного блока соединен с управляющим входом первого устройства выборки- хранения 9, выход компаратора 12 соединен с входом инвертора 13 и с первым выходом блока формирования промежуточных результатов, выход .инвертора 13 соединен с первым входом элемента И 14, второй вход-блока формирования промежуточных результатов- соединен с вторым входом элемента И 14, выход которого соединэн с вторым выходом измерительного блока, выход сумматора 10 соединен с инфор- м ционным входом второго устройства выборки-хранения, третий вход измерительного блока соединен с управляющим входом второго устройства выборки-хранения, выход второго устройства выборки-хранения 11 соединен с третьим выходом измерительного блока. Второй выход измерительного блока 3 соединен с третьим входом измерительного блока 4, а второй выход измерительного блока 4 соединен с .третьим входом измерительного блока с входом сигнальной обмотки соответствующих индукционных элементов.
На четвертые входы измерительных Ьлоков подаются импульсы запуска.
0278.4
Устройство работает следующим образом.
т. - -- -I
На обмотки возбуждения индукционных элементов 1 и 2 подается сийу- , соидальное напряжение возбуждения vUft. С сигнальных обмоток индукционных элементов 1 и 2 снимается переменное напряжение, вторая га-рмоника Q которого пропорциональна соответствующей компоненте магнитного поля Hjj, Н|1. Эти сигналы поступают на первые входы измерительных блоков 3 и 4, где они обрабатываются, при этом на третьих входах блоков 3 и 4 форми- руюгся постоянные.токи Ig я 1, пропорциональные коэффициентам полукруговой девиации В и С. Токи 1 и I-t, подаются в сигнальные обмотки соотвёт- ствующих элементов и компенсируют полукруговую девиацию.
Постоянные токи Ig и IQ не оказывают влияния на вход измерительного блока, так как он потребляет от ин- 5 дукционного элемента сигнал только в виде переменного напряжения.
Измерительный блок (фиг.З) работает следующим образом,
На первый вход блока 3 noc iynaei переменное напряжение с сиг н;тльной: обмотки индукционного элемента 1, вторая гармоникд которого пропорциональна соответствующей компоненте измеряемого магнитного поля. Вторая гармоника вьщеляется фильтром 6, вьшрямляется вьшрямителем 7, а фильтр 8 сглаживает пульсации вьшрямленно- го сигнала. В результате на выходе второго фильтра 8 появляется постоян30
35
40
ное напряжение,.пропорциональное составляющей измеряемого магнитного с поля. Импульс начального запуска, подаваемый на четвертый вход измерительного блока 3, воздействует на управляющий вход устройства выборки и хранения 9, и в нем записьгоается значение составляющей измеряемого магнитного поля в начальный момент. Сумматор 10 вычисляет сумму текущей составляющей магнитного поля и за помненной в устройстве вьйорки-хра- нения 9. Данная сумма запоминается в устройстве выборки-хранения 11 по импульсу, поступающему из измерительного блока 4 в момент, когда в
55 измерительном блоке 3 напряжение, запомненное в устройстве выборки- хранения 9, и выходное напряжение фильтра 8 не равны друг другу, а в
измерительном блоке 4 они будут равны. Эта логическая операция решается следующим образом. Сигналы, снимаемые с выхода фильтра 8 и запомненные в устройстве выборки-хранения 9, сравниваются . компаратором 12. Если эти сигналы Гавны, на выходе компаратора вьщаёт- ся сигнал логической 1, который подается на вход инвертора 13 данного блока формирования промежуточных результатов и через первый выход измерительного блока результатов на второй вход измерительного блока соседнего канала. Сигнал с выхода инвертора 13 подается на вход элемента И 14. Если сигнал с выхода пер , вого устройства выборки-хранения 9 и текущие сигналы, снимаемые с выхода второго фильтра 8, в одном измерительном блоке не равны друг другу, а в другом блоке равны, to на входах элемента И первого измерительного блока формируются две логические 1. При этом на выходе элемента И 14 формируется сигнал 1 который через второй выход измериг- тельного блока другого канала подается ,на информационный вход второго устройства выборки-хранения 11. Сигнал с второго устройства выборки- хранения 11 через выход измерительного блока 3 в виде постоянного тока подается на сигнальную обмотку индукционного элемента.
- 10
15
20
6102786
Формула изобретения
Устройство для компенсащи полукруговой девиации, содержащее взаим- ноперпендикулярные первый и второй индукционные элементы, соединенные через соответствующие измерительные, блоки с вычислительным блоком, отличающееся тем, что, с целью повышения быстродействия, каждый измерительный блок выполнен в виде последовательно соединенных первого фильтра, вьпрямителя второго фильтра, выход которого соединен с первым входом первого блока выборки-хранения и с первыми входами сумматора и компаратора, выход первого блока выборки-хранения соединён с вторыми входами сукг-атора и компаратора, выход которого через инвертор соединен с первым входом схемы И, а выход сумматора соединен с первым входом второго блока выборки-хранения, выход которого соединен с соответствующим индукционным элементом, выход схемы И первого измерительного блока соединен с вторым входом второго блока выборки-хранения второго измерительного блока, выход схемы И второго измерительного блока соединен с вторым входом первого блока выборки- хранения первого измерительного бло-- ка, выход компаратора первого измерив тельного блока соединен с вторым входом схемы И второго измерительного блока, а выход компаратора второго измерительного блока с вто- рьм входом схемы И первого и-змеритель- ного блока.
У
25
30
35
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля коэффициента неоднородности частиц ферромагнитных порошков | 1984 |
|
SU1241169A1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| ДАТЧИК МАГНИТНОГО КУРСА | 2007 |
|
RU2350906C1 |
| Устройство для измерения положения оси привариваемого ребра к листу из немагнитного материала | 1986 |
|
SU1540978A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРИОД - НАПРЯЖЕНИЕ | 1991 |
|
RU2030108C1 |
| Измерительный комплекс | 1988 |
|
SU1582156A1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДЗЕМНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ | 2002 |
|
RU2233460C1 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| Способ контроля работоспособности ленточного конвейера и устройство для его осуществления | 1988 |
|
SU1555240A1 |
Изобретение относится к навигационному приборостроению и может быть использовано для устранения полукруговой девиации индукционных компасов. Цель изобретения - расширение функциональных возможностей за счет автоматизации вычисления и компенсации полукруговой девиации. С взаимноперпендикулярных индукционных элементов 1,2 снимается переменное напряжение, пропорциональное соответствующей компоненте магнитного поля HX и HY. Это переменное напряжение поступает каждое на свой измерительный блок 3 или 4, на выходе которых формируются постоянные токи Jв и Jс, пропорциональные коэффициентам полукруговой девиации В и С. Подачей токов Jв и Jс в сигнальные обмотки соответствующих индукционных элементов компенсируется полукруговая девиация. В каждом измерительном блоке 3 или 4 входной сигнал поступает на фильтр, где выделяется вторая гармоника, которая выпрямляется в выпрямителе и сглаживается на фильтре. Сигнал с фильтра по сигналу запуск запоминается в блоке выборки-хранения, а также подается на сумматор и компаратор. На блоке выборки запоминается значение сигнала с сумматора по команде со схемы И второго измерительного блока, на первый вход которого, через инвертор поступает сигнал с компаратора. Причем на второй вход схемы И подается сигнал с выхода компаратора другого измерительного блока. Тем самым вычисляются коэффициенты полукруговой девиации В, С и через связь с индукционными элементами компенсируется полукруговая девиация. 3 ил.
физ.
