р - плотность материала ленты;
S - пощадь поперечного сечения ленты;
т - величина колеблющейся массы;
У - полная энергия колебания.
В реальных условиях при движении ленты на нее действуют внешние периодические силы, которые возбуждают колебания ленты. Однако по мере зарождения и углубления отмеченных дефектов конвейера
определяемый конструктивными параметрами датчика и грузонесуще- го органа. Подставляя (5) и (6) в (7), получают
Р к AtoCOSbrf
Ј-6 1 с. . л,i
бо+л -smut
(8)
которое очевидно можно записать также в виде
р „ -COSMt
Т+Л/Sosmcut
(9)
Графики изменения во времени сигнала Ef, (фиг. 1) соответствуют выражению (9) при различных соотношениях Л/бо неизменной круговой частоте (о (для кривых 1-4 значения Л/бо равны соответственно 0,1; 0,5; 0,8 и 0,9).
Среднее значение U с периодической функУстройство (фиг. 2) для осуществления способа содержит индукционный датчик 1, усилитель 2, блок 3 определения текущей величины периода колебаний ленты, блок 4 умножения, блок 5 масштабирования, вычислитель б экспоненты, сумматоры 7 и 8, блок 9 деления, блок 10 мас штаби- рования, фильтры 11 и 12 низких частот,
среднего значения периодической функции сигнала.
ции синала датчика E6(t) на интервале вре- 10 компаратор 13, измерительные приборы 14 и мени, равном полупериоду Г/2 поперечных 15 индикатор 16 и блок 17 определения колебаний ленты, определяется формулой i i+flz
/EAfy/dt(10)
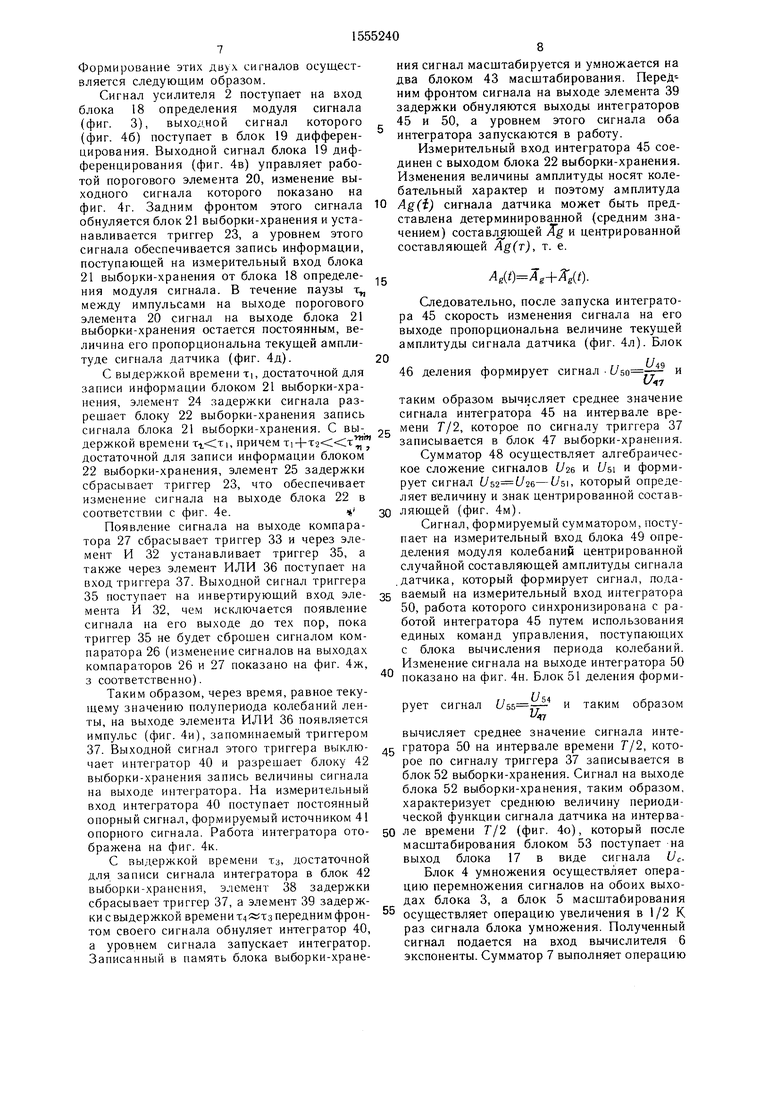
..jg Блок 3 определения текущей величины
(использование функции, взятой по абсолют- периода колебаний ленты (фиг. 3) содержит ной величине, объясняется тем обстоятельст- блок 18 определения модуля, блок 19 дифференцирования, пороговый элемент 20, первый 21 и второй 22 блоки выборки-хранения, первый триггер 23, первый 24 и второй 25 20 элементы задержки, первый 26 и второй 27 компараторы, элемент НЕ 28, ключ 29, первом, что интервал интегрирования является скользящим, а сама функция - знакопеременной).
Среднее значение сигнала датчика за период времени длительностью Т/2 равно вы- вый 30, второй 31 и третий 32 элементы И, соте прямоугольника с основанием Т/2, третий 33, второй 34 и четвертый 35 тригге- площадь которого равна площади, ограни- ры, элемент ИЛИ 36, пятый триггер 37, ченной положительно определенной функ- 25 тРетии 38 и четвертый 39 элементы задержки, интегратор 40, источник 41 опорного
цией Es(t) и осью времени за полупериод.
С учетом того, что принимая 24т
во внимание (8), можна записать выражение (10) в виде
,, гҐт KAacosat ,, 2 К A to
С Т тб+Л51Я(0/ Т CU Х
%A. w0+ASin t№ з/4т &o+Asinu t Т
(d0+Asin -)-ln(80 +
+ )} 2Ј ln(80+Asin) -Цв0+
, , . Злv, 2К, 60+Л, ч
+Asm- ) - /rtЈTX - 00
Из (11) следует, что
UJ . бо+Л
-- . )
2 Кбо-Л
35
40
напряжения, третий блок 42 выборки-хранения, первый 43 и второй 44 блоки масштабирования.
Блок 17 определения среднего значе- 30 ния периодической функции сигнала содержит первый интегратор 45, соединенный через первый блок 46 деления с блоком 47 выборки-хранения, который соединен с сумматором 48, и последовательно соединенные блок 49 определения модуля, второй интегратор 50, второй блок 51 деления, второй блок 52 выборки-хранения и блок 53 масштабирования.
Сигнал с выхода блока 21 выборки- хранения поступает на прямой вход компаратора 26 и через ключ 29, управляемый элементом НЕ 28, на инвертирующий вход компаратора 27. Сигнал с выхода блока 22 выборки-хранения поступает на прямой вход компаратора 27 и инвертирующий вход компаратора 26.
т. е.
УЈ ,л
гк Оо+А 60-Л
и, следовательно,
.(,2,
ехр(У$) +
Uс представляет собой значение сигнала на выходе интегратора функции |Ј«(/)|, т. е. характеризует значение функционала.
Таким образом, как следует из (12), для практической реализации способа контроля работоспособности ленточного конвейера по изменению параметров колебаний ленты, а именно по изменению амплитуды и частоты, необходимо иметь информацию о переменных величинах Ис и Т (остальные являются константами).
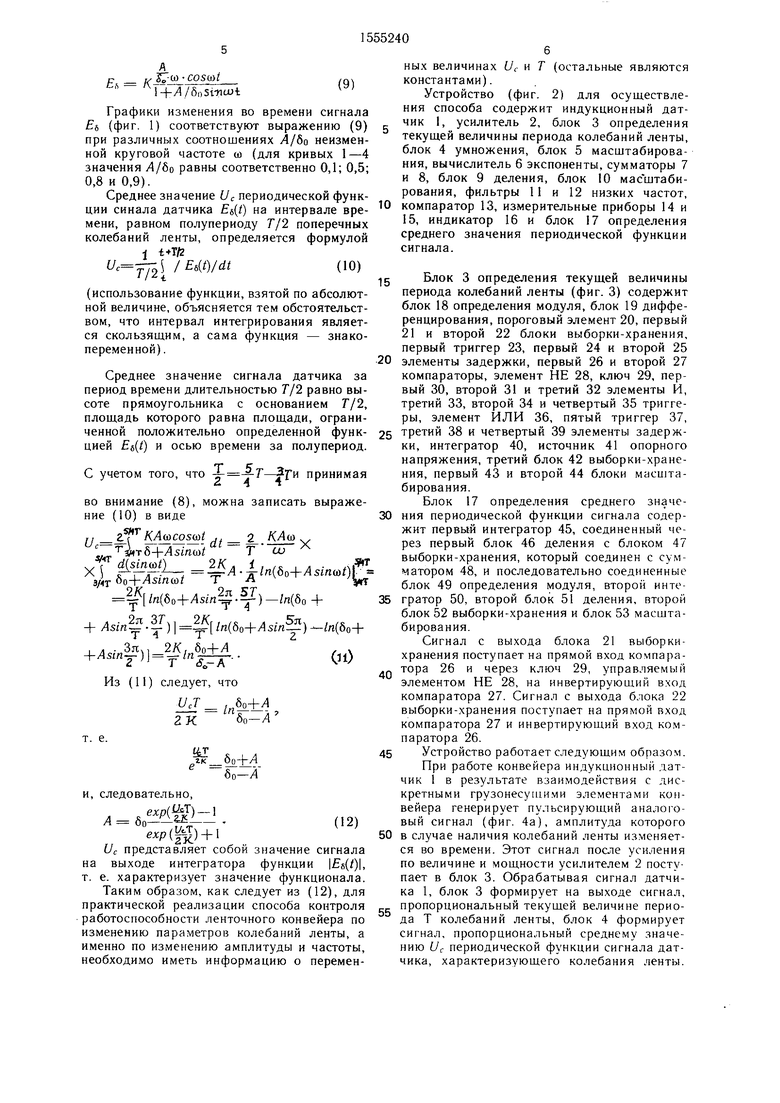
Устройство (фиг. 2) для осуществления способа содержит индукционный датчик 1, усилитель 2, блок 3 определения текущей величины периода колебаний ленты, блок 4 умножения, блок 5 масштабирования, вычислитель б экспоненты, сумматоры 7 и 8, блок 9 деления, блок 10 мас штаби- рования, фильтры 11 и 12 низких частот,
компаратор 13, измерительные приборы 14 и 15 индикатор 16 и блок 17 определения
среднего значения периодической функции сигнала.
компаратор 13, измерительные приборы 14 и 15 индикатор 16 и блок 17 определения
вый 30, второй 31 и третий 32 элементы И, третий 33, второй 34 и четвертый 35 тригге- ры, элемент ИЛИ 36, пятый триггер 37, 5 тРетии 38 и четвертый 39 элементы задержки, интегратор 40, источник 41 опорного
0
напряжения, третий блок 42 выборки-хранения, первый 43 и второй 44 блоки масштабирования.
Блок 17 определения среднего значе- ния периодической функции сигнала содержит первый интегратор 45, соединенный через первый блок 46 деления с блоком 47 выборки-хранения, который соединен с сумматором 48, и последовательно соединенные блок 49 определения модуля, второй интегратор 50, второй блок 51 деления, второй блок 52 выборки-хранения и блок 53 масштабирования.
Сигнал с выхода блока 21 выборки- хранения поступает на прямой вход компаратора 26 и через ключ 29, управляемый элементом НЕ 28, на инвертирующий вход компаратора 27. Сигнал с выхода блока 22 выборки-хранения поступает на прямой вход компаратора 27 и инвертирующий вход компаратора 26.
Устройство работает следующим образом.
При работе конвейера индукционный датчик 1 в результате взаимодействия с дискретными грузонесушими элементами конвейера генерирует пульсирующий аналоговый сигнал (фиг. 4а), амплитуда которого 0 в случае наличия колебаний ленты изменяется во времени. Этот сигнал после усиления по величине и мощности усилителем 2 поступает в блок 3. Обрабатывая сигнал датчика 1, блок 3 формирует на выходе сигнал, пропорциональный текущей величине периода Т колебаний ленты, блок 4 формирует сигнал, пропорциональный среднему значению L/C периодической функции сигнала датчика, характеризующего колебания ленты.
5
5
Формирование этих дв сигналов осуществляется следующим образом.
Сигнал усилителя 2 поступает на вход блока 18 определения модуля сигнала (фиг. 3), выходной сигнал которого (фиг. 46) поступает в блок 19 дифференцирования. Выходной сигнал блока 19 дифференцирования (фиг. 4в) управляет работой порогового элемента 20, изменение выходного сигнала которого показано на
ния сигнал масштабируется и умножается на два блоком 43 масштабирования. ПереД - ним фронтом сигнала на выходе элемента 39 задержки обнуляются выходы интеграторов 45 и 50, а уровнем этого сигнала оба интегратора запускаются в работу.
Измерительный вход интегратора 45 соединен с выходом блока 22 выборки-хранения. Изменения величины амплитуды носят колебательный характер и поэтому амплитуда
фиг. 4г. Задним фронтом этого сигнала 10 Ag(i) сигнала датчика может быть пред- обнуляется блок 21 выборки-хранения и уста-ставлена детерминированной (средним значением) составляющей Дд и центрированной составляющей Ag(r), т. е.
навливается триггер 23, а уровнем этого сигнала обеспечивается запись информации, поступающей на измерительный вход блока 21 выборки-хранения от блока 18 определе- 1g ния модуля сигнала. В течение паузы -ц, между импульсами на выходе порогового элемента 20 сигнал на выходе блока 21 выборки-хранения остается постоянным, величина его пропорциональна текущей амплитуде сигнала датчика (фиг. 4д).20
С выдержкой времени i, достаточной для записи информации блоком 21 выборки-хранения, элемент 24 задержки сигнала разрешает блоку 22 выборки-хранения запись
Ae(t)Ag+A g(t).
Следовательно, после запуска интегратора 45 скорость изменения сигнала на его выходе пропорциональна величине текущей амплитуды сигнала датчика (фиг. 4л). Блок
46 деления формирует сигнал и
С/«7
таким образом вычисляет среднее значение сигнала интегратора 45 на интервале вресигнала блока 21 выборки-хранения. С вы- 2с мени Т/2, которое по сигналу триггера 37 держкой времени , причем Ti-r-T2«T ffl записывается в блок 47 выборки-хранения.
достаточной для записи информации блоком 22 выборки-хранения, элемент 25 задержки сбрасывает триггер 23, что обеспечивает изменение сигнала на выходе блока 22 в соответствии с фиг. 4е.
Появление сигнала на выходе компаратора 27 сбрасывает триггер 33 и через элемент И 32 устанавливает триггер 35, а также через элемент ИЛИ 36 поступает на вход триггера 37. Выходной сигнал триггера
Сумматор 48 осуществляет алгебраическое сложение сигналов t/ге и и формирует сигнал t/52 t/26-Us, который определяет величину и знак центрированной состав- 30 ляющей (фиг. 4м).
Сигнал, формируемый сумматором, поступает на измерительный вход блока 49 определения модуля колебании центрированной случайной составляющей амплитуды сигнала
датчика, который формирует сигнал, пода- 35 поступает на инвертирующий вход эле- 35 ваемый на измерительный вход интегратора
50, работа которого синхронизирована с работой интегратора 45 путем использования единых команд управления, поступающих с блока вычисления периода колебаний. Изменение сигнала на выходе интегратора 50 40 показано на фиг. 4н. Блок 51 деления формимента И 32, чем исключается появление сигнала на его выходе до тех пор, пока триггер 35 не будет сброшен сигналом компаратора 26 (изменение сигналов на выходах компараторов 26 и 27 показано на фиг. 4ж, з соответственно).
Таким образом, через время, равное текущему значению полупериода колебаний ленты, на выходе элемента ИЛИ 36 появляется
рует сигнал Uss,-- и таким образом
1/47
вычисляет среднее значение сигнала интеимпульс (фиг. 4и), запоминаемый триггером 37. Выходной сигнал этого триггера выклю-45 гратора 50 на интервале времени Т/2, кото- чает интегратор 40 и разрешает блоку 42рое по сигналу триггера 37 записывается в выборки-хранения запись величины сигналаблок 52 выборки-хранения. Сигнал на выходе на выходе интегратора. На измерительныйблока 52 выборки-хранения, таким образом, вход интегратора 40 поступает постоянныйхарактеризует среднюю величину периоди- опорный сигнал, формируемый источником 41ческой функции сигнала датчика на интерва- опорного сигнала. Работа интегратора ото-50 ле времени Г/2 (фиг. 4о), который после бражена на фиг. 4к.масштабирования блоком 53 поступает на С выдержкой времени TJ, достаточнойвыход блока 17 в виде сигнала Uc- для записи сигнала интегратора в блок 42Блок 4 умножения осуществляет опера- выборки-хранения, элемент 38 задержкицию перемножения сигналов на обоих выхо- сбрасывает триггер 37, а элемент 39 задерж-дах блока 3, а блок 5 масштабирования кисвыдержкойвременит,4 тзпереднимфрон- 5 осуществляет операцию увеличения в 1/2 К
том своего сигнала обнуляет интегратор 40, а уровнем сигнала запускает интегратор. Записанный в память блока выборки-хранераз сигнала блока умножения. Полученный сигнал подается на вход вычислителя 6 экспоненты. Сумматор 7 выполняет операцию
ния сигнал масштабируется и умножается на два блоком 43 масштабирования. ПереД - ним фронтом сигнала на выходе элемента 39 задержки обнуляются выходы интеграторов 45 и 50, а уровнем этого сигнала оба интегратора запускаются в работу.
Измерительный вход интегратора 45 соединен с выходом блока 22 выборки-хранения. Изменения величины амплитуды носят колебательный характер и поэтому амплитуда
Ag(i) сигнала датчика может быть пред- ставлена детерминированной (средним знаAe(t)Ag+A g(t).
Следовательно, после запуска интегратора 45 скорость изменения сигнала на его выходе пропорциональна величине текущей амплитуды сигнала датчика (фиг. 4л). Блок
46 деления формирует сигнал и
С/«7
мени Т/2, которое по сигналу триггера 37 записывается в блок 47 выборки-хранения.
Сумматор 48 осуществляет алгебраическое сложение сигналов t/ге и и формирует сигнал t/52 t/26-Us, который определяет величину и знак центрированной состав- ляющей (фиг. 4м).
Сигнал, формируемый сумматором, поступает на измерительный вход блока 49 определения модуля колебании центрированной случайной составляющей амплитуды сигнала
рует сигнал Uss,-- и таким образом
1/47
вычисляет среднее значение сигнала интегратора 50 на интервале времени Т/2, кото- рое по сигналу триггера 37 записывается в блок 52 выборки-хранения. Сигнал на выходе блока 52 выборки-хранения, таким образом, характеризует среднюю величину периоди- ческой функции сигнала датчика на интерва- ле времени Г/2 (фиг. 4о), который после масштабирования блоком 53 поступает на выход блока 17 в виде сигнала Uc- Блок 4 умножения осуществляет опера- цию перемножения сигналов на обоих выхо- дах блока 3, а блок 5 масштабирования осуществляет операцию увеличения в 1/2 К
раз сигнала блока умножения. Полученный сигнал подается на вход вычислителя 6 экспоненты. Сумматор 7 выполняет операцию
алгебраического сложения сигнала t/е вычислителя экспоненты с постоянным опорным сигналом Ц,и формирует сигнал U7-Ue,-Vп, соответствующий выражению
U7 exp(±KUcT)-l.
Сумматор 8 выполняет функцию сложения сигнала UG с постоянным опорным сигналом Un и формирует сигнал соответствующий выражению
(l-KUcT)+l.
10 вале времени, равном полупериоду колебаний. Таким образом, способ позволяет непрерывно контролировать зарождение и развитие дефекта конвейера, обеспечивает высокую оперативность и надежность диагноБлок 9 деления осуществляет деление
сигнала Ui на сигнал Us, формируя сиг- 5 стирования работоспособности ленточного нал L/g.конвейера.
С выхода блока 9 деления сигнал поступает на вход блока 10 масштабирования,Формула изобретения который осуществляет операцию его увеличения в бо раз, и, следовательно, выходной 1. Способ контроля работоспособности сигнал блока 10 масштабирования содержит 20 ленточного конвейера, основанный на срав- информацию о величине амплитуды колеба- нении текущих значений диагностических
параметров, характеризующих его работоспособность, с их допустимыми величинами и формировании при достижении диагности- 25 ческими параметрами допустимых величин диагностического или управляющего сигнала, отличающийся тем, что, с целью повышения оперативности и надежности контроля, выделяют составляющую движения ленты, ортогональную плоскости ее рабочего
нии ленты, соответствующую выражению (12), и может быть использован для автоматического контроля работоспособности ленточного конвейера.
С целью обеспечения помехозащищенности контроля сигнал с выхода блока 10 масштабирования поступает на вход фильтра 11 низких частот, который осуществляет операцию усреднения сигнала , пропорционального амплитуде колебаний ленты, 30 перемещения, измеряют параметры этой составляющей движения и в результате их последующего функционального преобразования формируют диагностические параметры.
2. Способ по п. 1, отличающийся тем, что характер составляющей движения ленты, ортогональной плоскости ее рабочего перемещения, принимают гармоническим, в качестве параметра движения берут амплитуду гармонических колебаний, усредняют ее
причем интервал времени усреднения принимают в несколько раз большим, чем максимально возможный период колебаний ленты.
Сигнал с выхода фильтра низких частот, 35 определяющий среднюю величину амплитуды колебаний на скользящем интервале времени, подается на измерительный прибор 14 и на вход компаратора 13. При достижении сигналом на выходе фильтра 11 низких до на скользящем интервале времени, дли- частот предельно допустимого значения (по-тельность которого выбирается больше периода колебаний ленты, и по усредненному значению амплитуды формируют диагностирога срабатывания), определяющего максимально допустимую амплитуду колебаний ленты, компаратор 13 формирует выходной сигнал, который индицируется индикатором
ческии или управляющий сигнал.
3. Устройство контроля работоспособ16 и, кроме того, может быть использован 45 ности ленточного конвейера, содержащее
Предлагаемый способ обеспечивает возможность контроля работоспособности ленточного конвейера по изменению во времени параметров колебаний ленты, ортогональных
плоскости ее рабочего перемещения, а именно величины амплитуды колебаний ленты, определяемой по ревультатам измерений величины периода колебаний и среднего значения периодической функции сигнала, характеризующего колебания ленты на интервале времени, равном полупериоду колебаний. Таким образом, способ позволяет непрерывно контролировать зарождение и развитие дефекта конвейера, обеспечивает высокую оперативность и надежность диагностирования работоспособности ленточного конвейера.
ческии или управляющий сигнал.
3. Устройство контроля работоспособ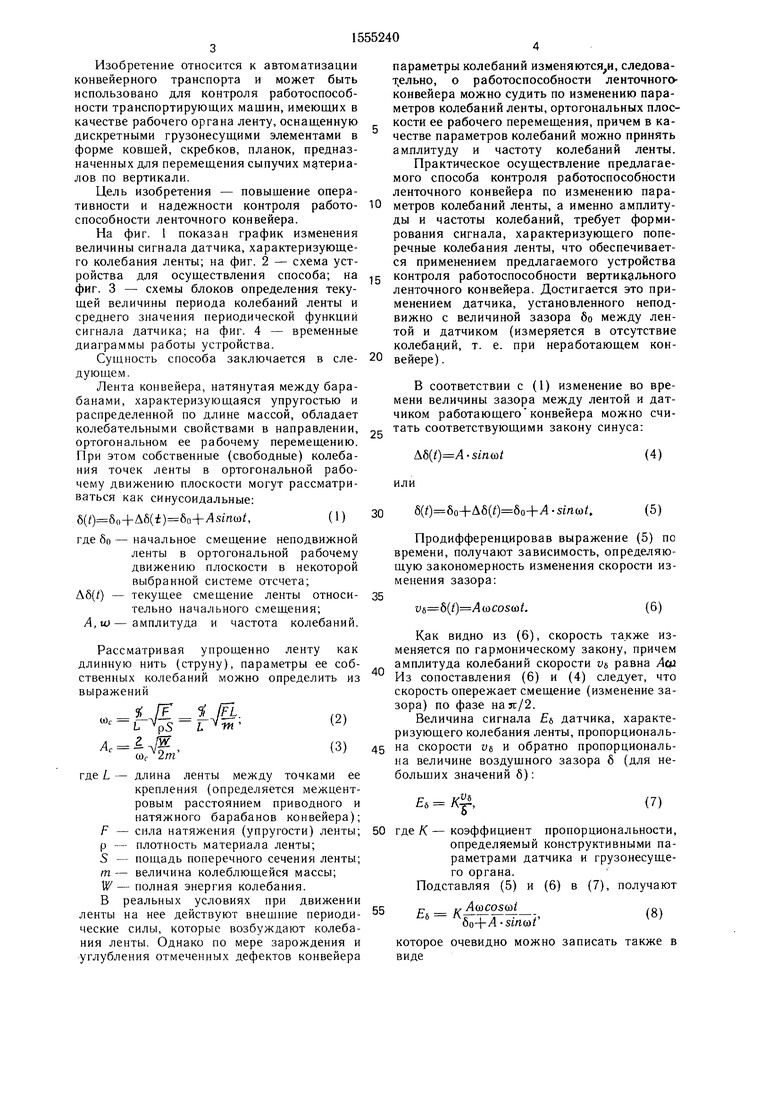

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля колебаний ленты вертикального ленточного конвейера | 1989 |
|
SU1676953A1 |
| Устройство контроля скорости ленты конвейера | 1989 |
|
SU1752687A1 |
| Устройство контроля смещения ленты конвейера | 1989 |
|
SU1616847A1 |
| Устройство контроля работоспособности ленточного конвейера | 1989 |
|
SU1759758A1 |
| Устройство контроля грузонесущей способности конвейера | 1989 |
|
SU1752688A1 |
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| Устройство контроля смещения ленты конвейера | 1990 |
|
SU1740282A1 |
| Устройство для определения шероховатости | 1991 |
|
SU1796053A3 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1987 |
|
SU1479394A1 |
| Устройство для измерения давления | 1988 |
|
SU1569621A1 |


Изобретение относится к автоматизации конвейерного транспорта и позволяет повысить оперативность и надежность контроля работоспособности ленточного конвейера. Способ основан на сравнении текущих значений диагностических параметров (ДП), характеризующих его работоспособность, с их допустимыми величинами и формировании диагностического или управляющего сигнала при достижении ДП допустимых величин. Дополнительно выделяют гармоническую составляющую движения ленты, ортогональную плоскости ее рабочего перемещения, и измеряют ее параметры. По результатам последующего функционального преобразования этих параметров формируют ДП. В качестве параметра движения берут амплитуду (А) гармонических колебаний ленты (КЛ). На скользящем интервале времени А усредняют. Длительность интервала времени выбирается больше периода КЛ. По усредненному значению А формируют диагностический или управляющий сигнал. При реализации способа установленный с зазором индукционный датчик 1 генерирует пульсирующий аналоговый сигнал, А которого при наличии КЛ изменяется во времени. Этот сигнал усиливается усилителем 2 и поступает в блок 3 определения текущей величины периода КЛ. С выхода блока 3 сигналы поступает в блок 4 умножения и блок 17 определения среднего значения периодической функции сигнала. Блок 4 перемножает сигналы на обоих выходах блока 3, и его выходной сигнал, в 1/2 К раз увеличенный в блоке 5 масштабирования, поступает на вход вычислителя 6 экспоненты. Сигнал с выхода блока 5 в сумматорах 7 и 8 алгебраически суммируется с постоянным опорным сигналом, и результирующий сигнал поступает на блок 9 деления, а оттуда через блок 10 масштабирования и фильтр 11 поступает на измерительный прибор 14 и компаратор 13. Компаратор 13 формирует выходной сигнал, пропорциональный А, который индицируется индикатором 16 и может быть использован для управления натяжением ленты. На измерительный прибор 15 через фильтр 12 поступает сигнал с выхода блока 3, пропорциональный величине периода КЛ. 2 с.и 3 з.п.ф-лы, 4 ил.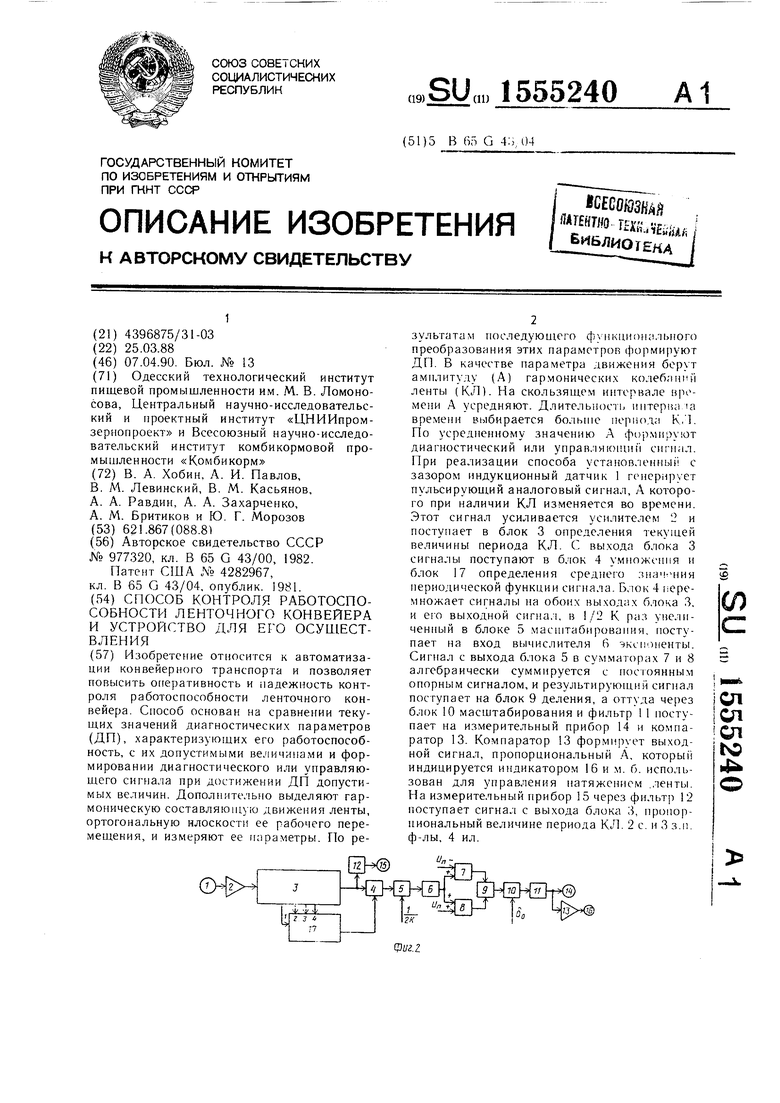
для управления устройством натяжения ленты конвейера либо для автоматического отключения конвейера.
Сигнал блока 3, характеризующий текущее значение периода колебаний ленты, по- дается на фильтр 12 низких частот, который осуществляет операцию усреднения сигнала на скользящем интервале времени, велииндукционныи датчик, установленный с возможностью взаимодействия с дискретными грузонесущими элементами конвейера, соединенный с усилителем, компаратор, блок деления, измерительные элементы и индикатор, отличающееся тем, что, с целью повышения оперативности и надежности контроля, в него введены блоки определения текущей величины периода колебаний ленты и среднего значения периодической функчина этого интервала времени равна
интервалу усреднения фильтра 11 низ-55 ции сигнала датчика, блок умножения, блоки
ких частот. Сигнал на выходе фильт-масштабирования, вычислитель экспоненты,
ра 12 низких частот, определяющийсумматоры, при этом выход усилителя соесреднюю величину периода колебаний лен-динен с первым входом блока определения
ты, подается на измерительный прибор 15.текущей величины периода колебаний ленты,
индукционныи датчик, установленный с возможностью взаимодействия с дискретными грузонесущими элементами конвейера, соединенный с усилителем, компаратор, блок деления, измерительные элементы и индикатор, отличающееся тем, что, с целью повышения оперативности и надежности контроля, в него введены блоки определения текущей величины периода колебаний ленты и среднего значения периодической функции сигнала датчика, блок умножения, блоки
11
четыре выхода которого соединены с соот- ветствующими; входами блока определения среднего значения периодической функции, пятый выход блока определения текущей величины периода колебаний ленты подключен непосредственно к первому входу блока умножения и через первый фильтр к первому измерительному элементу, выход блока определения среднего значения периодической функции сигнала датчика соединен с вторым входом блока умножения, выход ко- 10 торого через последовательно соединенные первый блок масштабирования и вычислитель экспоненты подключен к первым входам сумматоров, вторые входы которых соединены с соответствующим полюсом источника опорного напряжения, а выходы - с входами блока деления, выход последнего через последовательно соединенные вторые блок масштабирования и фильтр подключен к входам второго измерительного элемента и компаратора, выход последнего соединен с вхо- 20 дом индикатора.
15
рого компаратора, выходы последнего соединены с первыми входами второго элемен - та И и третьего триггера, выход первого компаратора соединен с первыми входами третьего элемента И и четвертого триггера, выход третьего триггера соединен с вторым входом третьего элемента И, выход которого соединен с вторыми входами первого элемента И и третьего триггера, выходы первого и второго элементов И соединены соответственно с вторыми входами второго и четвертого триггеров, выходы второго и четвертого триггеров соединены соответственно с первым входом элемента ИЛИ и с вторым входом второго элемента И, выход которого соединен также с вторым входом элемента ИЛИ, выход последнего подключен к первому входу пятого триггера, выход которого соединен с первыми входами интегратора, третьего блока выборки-хранения и через третий элемент задержки с вторым входом пятого триггера и с входом четвертого элемента задержки, а также является вторым выходом блока, выход четвертого элемента задержки соединен с вторым и четвертым входами интегратора,
периода колебаний ленты содержит последо- 25 третий вход которого соединен с источнивательно соединенные блок определения модуля, блок дифференцирования и пороговый элемент, а также блоки выборки-хранения, триггеры, элементы задержки, элементы НЕ, И, ИЛИ, ключ, компараторы, блоки масштабирования, интегратор, источник опорного напряжения, при этом выход блока определения модуля соединен с первым входом первого блока выборки-хранения, выход порогового элемента подключен к второму и третьему входам первого блока выборки-хранения, к входу элемента НЕ, к первому входу первого элемента И и второго триггера, к первому входу первого триггера, второй вход которого соединен с выходом первого элемента задержки, выход первого триггера соединен с входом второго элемента задержки, выход которого соединен с первым входом второго блока выборки- хранения и входом первого элемента задержки, выход первого блока выборки-хранения соединен с вторым входом второго блока
30
35
40
ком опорного напряжения, четвертый вход является третьим входом блока, а выход соединен с вторым входом третьего блока выборки-хранения, выход которого соединен с входом первого блока масштабирования, выход которого подключен к входу второго блока масштабирования, выходы блоков масштабирования являются соответственно четвертым и пятым выходами блока.
входом второго интегратора и является вторым входом блока, третий вход первого интегратора объединен с вторым входом второго интегратора и является третьим входом блока, вторые входы блоков деления
дом ключа и подключен к первому входу первого компаратора, выход второго блока выборки-хранения подключен к второму входу первого компаратора и первому входу второго компаратора, а также является
первым выходом блока, выход элемента НЕ 50 объединены и являются четвертым входом соединен с вторым входом ключа, выход блока, а выход блока масштабирования которого подключен к второму входу вто-является выходом блока.
12
0
рого компаратора, выходы последнего соединены с первыми входами второго элемен - та И и третьего триггера, выход первого компаратора соединен с первыми входами третьего элемента И и четвертого триггера, выход третьего триггера соединен с вторым входом третьего элемента И, выход которого соединен с вторыми входами первого элемента И и третьего триггера, выходы первого и второго элементов И соединены соответственно с вторыми входами второго и четвертого триггеров, выходы второго и четвертого триггеров соединены соответственно с первым входом элемента ИЛИ и с вторым входом второго элемента И, выход которого соединен также с вторым входом элемента ИЛИ, выход последнего подключен к первому входу пятого триггера, выход которого соединен с первыми входами интегратора, третьего блока выборки-хранения и через третий элемент задержки с вторым входом пятого триггера и с входом четвертого элемента задержки, а также является вторым выходом блока, выход четвертого элемента задержки соединен с вторым и четвертым входами интегратора,
0
5
0
ком опорного напряжения, четвертый вход является третьим входом блока, а выход соединен с вторым входом третьего блока выборки-хранения, выход которого соединен с входом первого блока масштабирования, выход которого подключен к входу второго блока масштабирования, выходы блоков масштабирования являются соответственно четвертым и пятым выходами блока.
о
N
Ю
ю irt
Ј
О
U
o
ч 1ХгхЛ Г Г Г Г Г Г ГУ гхг JL vl | J J 1 vl М
пппппппппг
рп п гГп
сУ - пППППпг-у
П ППП П
п п п
п п п п п
фиг. 4
| Способ контроля скорости конвейерной ленты | 1980 |
|
SU977320A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Патент США № 4282967, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
