Изобретение относится к электротехнике и может быть использовано в тихоходных электроприводах с вентильным электродвигателем.
Цель изобретения - повьппение надежности и увеличение срока службы,
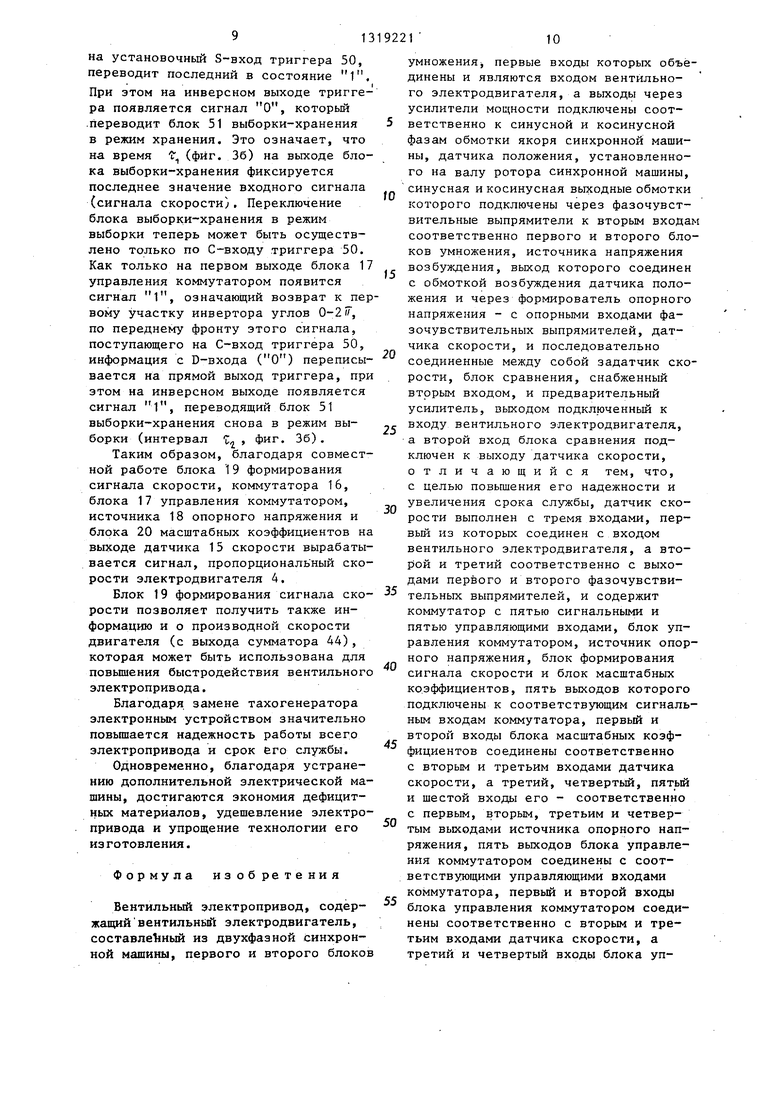
. На фиг, 1 показана функциональная схема вентильного электропривода; на фиг. 2 - схема датчика скорости; на фиг. 3 - диаграммы, иллюстрирующие работу вентильного электроприв ода.
Вентильный электропривод содержит последовательно соединенные задат- чик 1 скорости, блок 2 сравнения, предварительный усилитель 3, Вентильный электродвигатель 4 содержит двухфазную синхроннзто машину 5, первый 6 и второй 7. блоки умножения, первые входы которых объединены и являются входом вентильного электродвигателя 4, а выходы через усилители 8 и 9 мощности подключены соответственно к синусной и косинусной фазам обмотки якоря синхронной машины 5, датчик 10 положения, установленный на валу ротора синхронной машины 5, синусная и косинусная выходные обмотки которого подключены через фазочувствительные выпрямители 11 и 12 к вторым входам соответственно блоков 6 и 7 умножения, и источни 13 напряжения возбуждения, выход которого соединен с обмоткой возбуждения датчика 10 положения и через формирователь 14 опорного напряжения с опорными входами фазочувствитель- ных выпрямителей 11 и 12, а также датчик 15 скорости, выход которого подключен к второму входу блока 2 сравнения.
Первый вход датчика скорости соединен с входом вентильного электродвигателя 4, второй и третий входы - соответственно с выходами фазочувст- вительных выпрямителей 11 и 12. Датчик 15 скорости содержит коммутатор 16 с пятью сигнальными и пятью управляющими входами, блок 17 управления коммутатором, источник 18 опорного напряжения, блок 19 формировани сигнала скорости и блок 20 масштабны коэффициентов, пять выходов которого подключены к соответствующим сигнальПервые входы пятого и шестого элементов 2И 31 и 32 подключены к выходу первого элемента 2И 27, первые входы седьмого и восьмого элемен тов 2И 33 и 34 подключены к выходу второго элемента 2И 28 и первые входы девятого и десятого элементов 2И
ным входам коммутатора 16, первьй и „
второй входы блока 20 соединены соот- 35 и 36 подключены к выходу третьего
ветственно с вторым и третьим входами
датчика 13 скорости,а третий - шестой
входы - соответственно с- первым - четэлемента 2И 29. Первые входы одиннадцатых и двенадцатых элементов 2И 37 и 38 подключены к выходу чет
вертым выходами источника 18 опорного напряжения. Выходы блока 17 управле- ния соединены с соответствующими управляющими входами коммутатора 16, первый и второй входы блока управления соединены соответственно- с вторым и третьим входами датчика 15 скорости, а третий и четвертый входы - соответственно с пятым и шестым выходами источника 18 опорного напряжения.
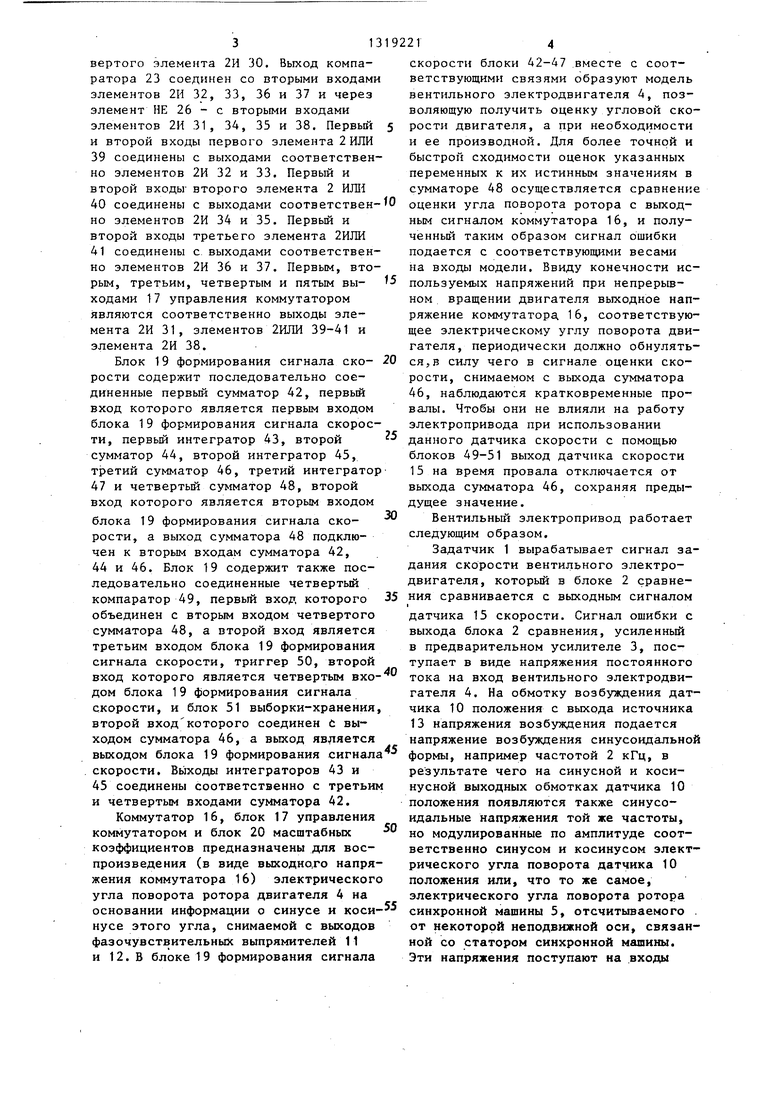
Первый, второй, третий и четвертый входы блока 19 формирования сигнала скорости соединерш соответственно с первым входом датчика 15 скорости, выходом коммутатора 16, седьмым выходом источника 18 опорного напряжения и первым выходом блока 17 управления коммутатором, а выход является выходом датчика 15 скорости. Блок 17 управления коммутатором содержит компараторы 21-23, элементы НЕ 24-26, элементы 2И 27-38 и эле- менты 2 ИЛИ 39-41, причем первые входы первых и третьего компараторов 21 и 23 соединены с первым входом блока 17 управления коммутатором, первьй вход второго компаратора 22 подключен к второму входу блока 17 управления коммутатора, вторые входы первого и второго компараторов 21 и 22 соединены с третьим входом блока 17 управления коммутатором, второй вход третьего компаратора 23 подключен к четвертому входу блока 17 управления коммутатором. Выход первого компаратора 21 соединен с первыми входами первого и второго элементов 2И 27 и 28 и через первьй элемент НЕ 24 - с первыми входами третьего и четвертого элементов 2И 29 и 30. Выход второго компаратора 22 соединен с вторыми входами первого и четвертого элементов 2И 27 и 30 и через элемент НЕ 25 - с вторыми входами второго и третьего элементов 2И 28 и 29.
Первые входы пятого и шестого элементов 2И 31 и 32 подключены к выходу первого элемента 2И 27, первые входы седьмого и восьмого элементов 2И 33 и 34 подключены к выходу второго элемента 2И 28 и первые входы девятого и десятого элементов 2И
35 и 36 подключены к выходу третьего
элемента 2И 29. Первые входы одиннадцатых и двенадцатых элементов 2И 37 и 38 подключены к выходу четвертого элемента 2И 30. Выход компаратора 23 соединен со вторыми входами элементов 2И 32, 33, 36 и 37 и через элемент НЕ 26 - с вторыми входами элементов 2И 31, 34, 35 и 38. Первый 5 и второй входы первого элемента 2 ИЛИ
39соединены с выходами соответственно элементов 2И 32 и 33. Первый и второй ВХОДЫ второго элемента 2 ИЛli
40соединены с выходами соответствен- 0 но элементов 2И 34 и 35. Первый и второй входы третьего элемента 2ИЛИ
41соединены с выходами соответственно элементов 2И 36 и 37. Первым, вторым, третьим, четвертым и пятым вы- 5 ходами 17 управления коммутатором являются соответственно выходы элемента 2И 31, элементов 2ИЛИ 39-41 и элемента 2И 38.
Блок 19 формирования сигнала ско- 20 рости содержит последовательно соединенные первый сумматор 42, первый вход которого является первым входом блока 19 формирования сигнала скорости, первьш интегратор 43, второй сумматор 44, второй интегратор 45, третий сумматор 46, третий интегратор 47 и четвертьй сумматор 48, второй вход которого является вторым входом
блока 19 формирования сигнала скорости, а выход сумматора 48 подключен к вторым входам сумматора 42, 44 и 46. Блок 19 содержит также последовательно соединенные четвертый компаратор 49, первый вход которого объединен с вторым входом четвертого сумматора 48, а второй вход является третьим входом блока 19 формирования сигнала скорости, триггер 50, второй вход которого является четвертым вхо дом блока 19 формирования сигнала скорости, и блок 51 выборки-хранения, второй вход которого соединен С выходом сумматора 46, а выход является
30
35
..40
скорости блоки 42-47 вместе с с ветствующими связями образуют м вент 1льного электродвигателя 4, воляющую получить оценку углово рости двигателя, а при необходи и ее производной. Для более точ быстрой сходимости оценок указа переменных к их истинным значен сумматоре 48 осуществляется сра оценки угла поворота ротора с в ным сигналом коммутатора 16, и ченный таким образом сигнал оши подается с соответствующими вес на входы модели. Ввиду конечнос пользуемых напряжений при непре ном вращении двигателя выходно ряжение коммутатора, 16, соответ щее электрическому углу поворот гателя, периодически должно обн ся,в силу чего в сигнале оценки рости, снимаемом с выхода сумма 46, наблюдаются кратковременные валы. Чтобы они не влияли на ра электропривода при использовани данного датчика скорости с помо блоков 49-51 выход датчика скор 15 на время провала отключается выхода сумматора 46, сохраняя п дущее значение.
Вентильньй электропривод раб следующим образом.
Задатчик 1 вырабатывает сигн дания скорости вентильного элек двигателя, который в блоке 2 ср ния сравнивается с выходньм сиг
датчика 15 скорости. Сигнал оши выхода блока 2 сравнения, усиле в предварительном усилителе 3, тупает в виде напряжения постоя тока на вход вентильного электр гателя 4. На обмотку возбуждени чика 10 положения с выхода исто 13 напряжения возбуждения подае напряжение возбуждения синусоид
выходом блока 19 формирования сигнала формы, например частотой 2 кГц,
скорости. Выходы интеграторов 43 и 45 соединены соответственно с третьим и четвертым входами сумматора 42.
Коммутатор 16, блок 17 управления коммутатором и блок 20 масштабных коэффициентов предназначены для воспроизведения (в виде ВЫХОДНО.ГО напряжения коммутатора 16) электрического угла поворота ротора двигателя 4 на основании информации о синусе и коси- нусе этого угла, снимаемой с выходов фазочувствительных выпрямителей 11 и 12. В блоке 19 формирования сигнала
результате чего на синусной и к нусной выходных обмотках датчик положения появляются также сину идальные напряжения той же част но модулированные по амплитуде ветственно синусом и косинусом рического угла поворота датчика положения или, что то же самое, электрического угла поворота ро синхронной машины 5, отсчитывае от некоторой неподвижной оси, с ной со статором синхронной маши Эти напряжения поступают на вхо
5
0
5
20
,
30
35
40
скорости блоки 42-47 вместе с соответствующими связями образуют модель вент 1льного электродвигателя 4, позволяющую получить оценку угловой скорости двигателя, а при необходимости и ее производной. Для более точной и быстрой сходимости оценок указанных переменных к их истинным значениям в сумматоре 48 осуществляется сравнение оценки угла поворота ротора с выходным сигналом коммутатора 16, и полученный таким образом сигнал ошибки подается с соответствующими весами на входы модели. Ввиду конечности используемых напряжений при непрерывном вращении двигателя выходное напряжение коммутатора, 16, соответствующее электрическому углу поворота двигателя, периодически должно обнуляться,в силу чего в сигнале оценки скорости, снимаемом с выхода сумматора 46, наблюдаются кратковременные провалы. Чтобы они не влияли на работу электропривода при использовании данного датчика скорости с помощью блоков 49-51 выход датчика скорости 15 на время провала отключается от выхода сумматора 46, сохраняя предыдущее значение.
Вентильньй электропривод работает следующим образом.
Задатчик 1 вырабатывает сигнал задания скорости вентильного электродвигателя, который в блоке 2 сравнения сравнивается с выходньм сигналом
датчика 15 скорости. Сигнал ошибки с выхода блока 2 сравнения, усиленный в предварительном усилителе 3, поступает в виде напряжения постоянного тока на вход вентильного электродвигателя 4. На обмотку возбуждения датчика 10 положения с выхода источника 13 напряжения возбуждения подается напряжение возбуждения синусоидальной
формы, например частотой 2 кГц,
в
результате чего на синусной и косинусной выходных обмотках датчика 10 положения появляются также синусоидальные напряжения той же частоты, но модулированные по амплитуде соответственно синусом и косинусом электрического угла поворота датчика 10 положения или, что то же самое, электрического угла поворота ротора синхронной машины 5, отсчитываемого . от некоторой неподвижной оси, связанной со статором синхронной машины. Эти напряжения поступают на входы
5
фазочувствительных выпрямителей 11 и 12.
Формирователь 14 опорного напряжния преобразует синусоидальное напряжение, подаваемое с выхода источника 13 напряжения возбуждения, в напряжение прямоугольной формы, которое подается на опорные входы фазчувствительных выпрямителей 11 и 12 В результате на выводах этих выпрямителей формируются напряжения постоянного тока, пропорциональные сооветственно синусу и косинусу электрического угла поворота двигателя. Эти напряжения, будучи умножены в блоках 6 и 7 умножения на входное напряжение двигателя и усиленные в усилителях 8 и 9 мощности, преобра-, зуются в напряжения, приложенные к сдвинутым друг относительно друга н 90 эл.град. фазам якорной обмотки синхронной машины 5. При этом в расточке статора машины возникает результирующая НДС, вектор которой, представляющий собой сумму векторов ВДС с синусной и косинусной фаз, наравлен под углом (/ к оси отсчета углов и, таким образом, оказьшается жестко связан с ротором синхронной машины 5. Установленные на роторе постоянные магниты (либо полюсы с обмоткой возбуждения) ориентированы так, что вектор их МДС перпендикуля рен вектору МДС якорной обмотки. Ка известно, при такой ориентации поле электромагнитный момент, приложенны к ротору двигателя, максимален. Под действием этого момента ротор вращается, а вместе с ним вращается и вектор МДС якорной обмотки, а также вектор МДС возбуждения синхронной машины. Поскольку цри этом взаимная ориентация названных векторов не меняется, значение момента двигателя, как и в обычном коллекторном двигателе постоянного тока, не зависит о углового положения ротора и определется фазными токами обмотки якоря, последние, в свою очередь, разность между фазными напряжениями, пропорциональными входному (управляющему) напряжению вентильного электродвигателя 4, и противо-ЭДС, пропорционалной скорости вращения. Благодаря дествию отрицательной обратной связи по скорости, реализуемой с помощью датчика 15 скорости, значение скороти двигателя поддерживается равным
s
0
5
0
5
0
5
0
5
заданному путем воздействия на входное напряжение двигателя.
Датчик 15 скорости в предлагаемом вентильном электроприводе работает следующим образом.
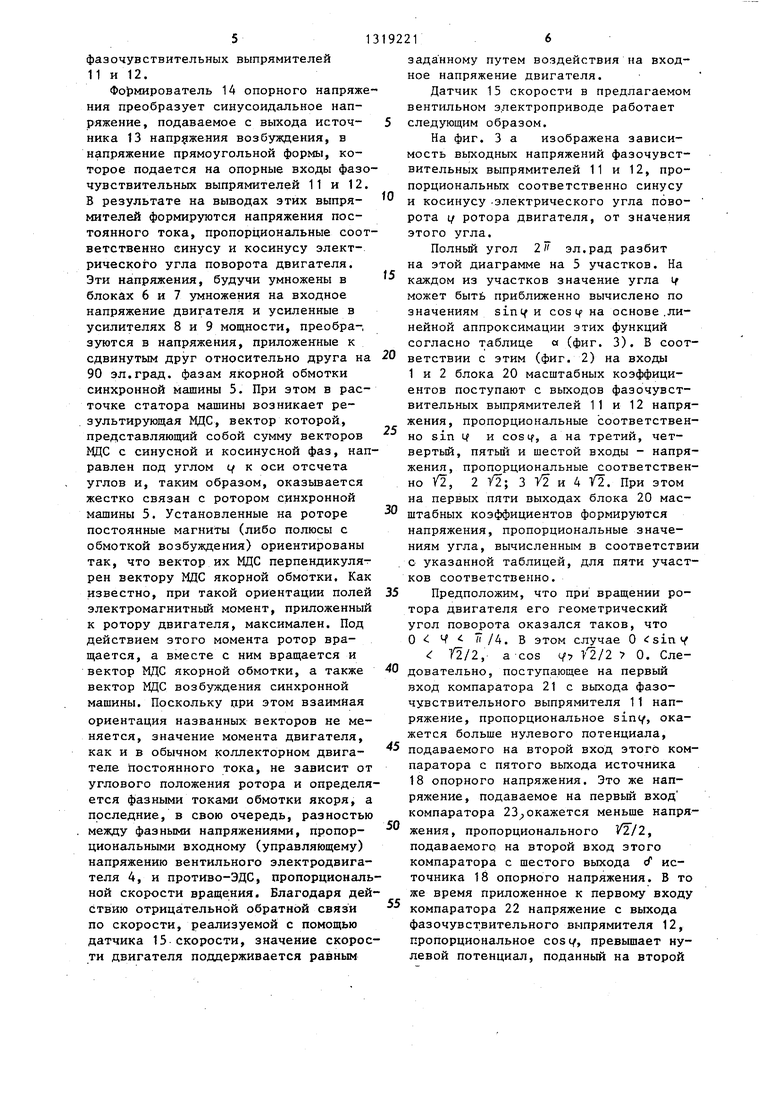
На фиг. 3 а изображена зависимость выходных напряжений фазочувствительных выпрямителей 11 и 12, пропорциональных соответственно синусу и косинусу .электрического угла пово- рота If ротора двигателя, от значения этого угла.
Полный угол 2 эл.рад разбит на этой диаграмме на 5 участков. На каждом из участков значение угла if может быть приближенно вычислено по значениям cos tf на основе .линейной аппроксимации этих функций согласно таблице а (фиг. 3). В соответствии с этим (фиг. 2) на входы 1 и 2 блока 20 масштабных коэффициентов поступают с выходов фазочувствительных выпрямителей 11 и 12 напряжения, пропорциональные соответственно sin Lf и cosif, а на третий, четвертый, пятьо и шестой входы - напряжения, пропорциональные соответственно V2, 2 У2; 3 У2 и 4 VI. При этом на первых пяти выходах блока 20 масштабных коэффициентов формируются напряжения, пропорциональные значениям угла, вычисленным в соответствии с указанной таблицей, для пяти участков соответственно.
Предположим, что при вращении ротора двигателя его геометрический угол поворота оказался таков, что О ; ч . В этом случае О sin У2/2, а cos ч- 2/2 0. Следовательно, поступающее на первый вход компаратора 21 с выхода фазо- чувствительного выпрямителя 11 напряжение, пропорциональное siny, окажется больше нулевого потенциала, подаваемого на второй вход этого компаратора с пятого выхода источника 18 опорного напряжения. Это же напряжение, подаваемое на первый вход компаратора 23 окажется меньше напряжения, пропорционального VT/2, подаваемого на второй вход этого компаратора с шестого выхода сГ источника 18 опорного напряжения. В то же время приложенное к первому входу компаратора 22 напряжение с выхода фазочувствительного выпрямителя 12, пропорциональное cos i/, превышает нулевой потенциал, поданный на второй
71
вход этог о компаратора. В результате на выходах компаратора 21 и 22 устанавливаются напряжения, соответствующие по уровню логической единице, а на входе компаратора 23 - напряжение соответствующее логическому нулю. Пр этом на выходах элементов НЕ 24-26 появляются сигналы соответственно О, О и 1, а на выходах элементов И 27-30 - соответственно сигналы 1, О, О и О. Тогда на выходе элемента И 31 устанавливается напряжение 1, а на выходах остальных элементов И 32-38, а также элементов ИЛИ 39-41 - напряжение О. Следовательно, на первый управляющий вход коммутатора 16 с первого выхода блока 17 управления коммутатором поступает сигнал 1, на остальные управляющие входы - сигналы О. В результате этого к выходу коммутатора 16 подключается его первый сигнальный вход, поэтому выходной сигнал комг.1утатора представляет собой напряжение, сформированное по аппроксимирующему выражению для ц на перво участке интервала 0-27Г.
При прохождении, по мере вращения ротора и увеличения угла поворота, последующих участков углового интер вала 0-2/Г сигнал логической единицы появляется последовательно на втором третьем, четвертом и пятом выходах блока 17 управления коммутатором.
.-
при этом на остальных выходах присут- 35 рости, а предварительно поступает на ствует сигнал ,0. В результате этого сигнальный вход блока 51 выборки-хра- к выходу коммутатора 16 поочередно
нения. При включении питания D-триг- гер 50 по цепи начального сброса (RC-цепь) устанавливается в О, при этом на используемом в данной схеме инверсном выходе триггера (Q) присутствует сигнал. Этот сигнал, воздействуя на управляющий вход блока 51 выборки-хранения, переводит его в режим выборки. Это означает, что выходной сиг- пал этого устройства повторяет сигнал, поступающий на его сигнальный вход. При достижении выходным напряжением коммутатора 16, подаваемым на первый
подключаются второй, третий, четвертьй и пятый сигнальные ходы, и на выходе коммутатора воспроизводится значение угла L/ , причем кривая зависимости угла от времени оказывается как бы сшитой из отдельных участков. Посл достижения значения Ц| 2я происхо- дит возврат к первому участку, т.е. сброс выходного сигнала коммутатора в ноль, и процесс повторяется так, как было описано. График зависимости выходного напряжения коммутатора 16 от времени при равномерном вращении двигателя показан на фиг. 3.
Как уже указывалось блоки 42-47 вместе с соответствующими связями образуют модель вентильного электродвигателя 4. На ее вход, как и на вход двигателя, подается напряжение с выхода предварительного усилителя 3, в результате чего на выходе моде8
JO
15
20
25
30
ли, т.е. на выходе интегратора А7, формируется сигнал оценки угла поворота двигателя. В сумматоре 48 этот сигнал и выходной сигнал коммутатора 16 суммируется с разнь1ми знаками. Предположим, что вследствие неточного соответствия параметров модели параметрам реального двигателя или несовпадения начальных значений переменных, характеризующих поведение обоих устройств, выходной сигнал интегратора 47 превышает выходной сигнал коммутатора 16. Тогда на выходе сумматора 48 появляется отрицательный сигнал ошибки, который, будучи подан с соответствующими весовыми коэффициентами на входах сумматоров 42, 44 и 46, уменьшает выходной сигнал интегратора 47 до тех пор, пока он не сравняется с выходным сигналом коммутатора. В результате выходное напряжение интегратора 47 представляет собой оценку электрического угла поворота ротора двигателя. Следовательно, выходной сигнал этого интегратора является оценкой электрической угловой скорости двигателя.
Поскольку кривая зависимость угла от времени терпит разрывы (фиг. 36), в кривой оценки скорости наблюдаются кратковременные провалы. В связи с этим выходной сигнал сумматора 46 непосредственно не используется в качестве сигнала обратной связи по скорости, а предварительно поступает на сигнальный вход блока 51 выборки-хра-
нения. При включении питания D-триг- гер 50 по цепи начального сброса (RC-цепь) устанавливается в О, при этом на используемом в данной схеме инверсном выходе триггера (Q) присутствует сигнал. Этот сигнал, воздействуя на управляющий вход блока 51 выборки-хранения, переводит его в режим выборки. Это означает, что выходной сиг- пал этого устройства повторяет сигнал, поступающий на его сигнальный вход. При достижении выходным напряжением коммутатора 16, подаваемым на первый
вход компаратора 49, напряжения порога и (фиг. Зб), подаваемого на второй вход компаратора 49, на выходе компаратора 49 появляется сигнал О (согласно принципиальной схеме, фиг.2,
компаратор 49 реализован посредством . собственно компаратора, на выходе которого устанавливается уровень 1, и элемента НЕ). Э.тот сигнал, поступая
на установочный S-вход триггера 50, переводит последний в состояние 1. При этом на инверсном выходе триггера появляется сигнал О, который .переводит блок 51 выборки-хранения в режим хранения. Это означает, что на время t (фиг. Зб) на выходе блока выборки-хранения фиксируется последнее значение входного сигнала (сигнала скорости). Переключение блока выборки-хранения в режим выборки теперь может быть осуществлено только по С-входу триггера 50. Как только на первом выходе блока 17 управления коммутатором появится сигнал 1, означающий возврат к первому участку инвертора углов 0-21/, по переднему фронту этого сигнала, поступающего на С-вход триггера 50, информация с D-входа (О) переписывается на прямой выход триггера, при этом на инверсном выходе появляется сигнал 1, переводящий блок 51 выборки-хранения снова в режим выборки (интервал Фиг. 36).
Таким образом, благодаря совместной работе блока 19 формирования сигнала скорости, коммутатора 16, блока 17 управления коммутатором, источника 18 опорного напряжения и блока 20 масштабных коэффициентов на вьрсоде датчика 15 скорости вырабатывается сигнал, пропорциональ ный скорости электродвигателя 4.
Блок 19 формирования сигнала скорости позволяет получить также информацию и о производной скорости двигателя (с выхода сумматора 44), которая может быть использована для повышения быстродействия вентильного электропривода.
Благодаря замене тахогенератора электронным устройством значительно повьшается надежность работы всего электропривода и срок его службы.
Одновременно, благодаря устранению дополнительной электрической машины, достигаются экономия дефицитных материалов, удешевление электропривода и упрощение технологии его изготовления.
Формула изобретения
Вентильный электропривод, содержащий вентильный электродвигатель, составлеТ1Ный из двухфазной синхронной машины, первого и второго блоков
5
0
5
0
5
0
5
0
5
умноженияj первые входы которых объединены и являются входом вентильного электродвигателя, а выходы через усилители мощности подключены соответственно к синусной и косинусной фазам обмотки якоря синхронной машины, датчика положения, установленного на валу ротора синхронной машины, синусная и косинусная выходные обмотки которого подключены через фазочувст- вительные выпрямители к вторым входам соответственно первого и второго блоков умножения, источника напряжения возбуждения, выход которого соединен с обмоткой возбуждения датчика положения и через формирователь опорного напряжения - с опорными входами фа- зочувствительных выпрямителей, датчика скорости, и последовательно соединенные между собой задатчик скорости, блок сравнения, снабженный вторым входом, и предварительный усилитель, выходом подключенный к входу вентильного электродвигателя, а второй вход блока сравнения подключен к выходу датчика скорости, отличающийся тем, что, с целью повышения его надежности и увеличения срока службы, датчик скорости выполнен с тремя входами, пер- вьш из которых соединен с входом вентильного электродвигателя, а второй и третий соответственно с выходами первого и второго фазочувстви- тельных выпрямителей, и содержит коммутатор с пятью сигнальными и пятью управляющими входами, блок управления коммутатором, источник опорного напряжения, блок формирования сигнала скорости и блок масштабных коэффициентов, пять выходов которого подключены к соответствующим сигнальным входам коммутатора, первый и второй входы блока масштабных коэффициентов соединены соответственно с вторым и третьим входами датчика скорости, а третий, четвертый, пятый и шестой входы его - соответственно с первым, вторым, третьим и четвертым выходами источника опорного напряжения, пять выходов блока управления коммутатором соединены с соответствующими управляющими входами коммутатора, первый и второй входы блока управления коммутатором соединены соответственно с вторым и третьим входами датчика скорости, а третий и четвертый входы блока уп1113
равления - соответственно с пятым и шестым выходами источника опорного напряжения, первый, второй, третий и четвертый входы блока формирования сигнала скорости соединены соот- ветственно с первым входом датчика скорости, выходом коммутатора, седьмым выходом источника опорного напряжения и первым выходом блока уп
равления коммутатором, а выход блока
формирования сигнала скорости является выходом датчика скорости, блок управления коммутатором содержит три компаратора, три элемента НЕ, двенадцать элементов 2И и три эле- мента 2ИЛИ, причем первые входы первого и третьего компараторов соединены с первым входом блока управления коммутатором, первьш вход второ
го компаратора подключен к второму
входу блока управления коммутатором, вторые входы первого и второго компараторов соединены с третьим входом блока управления коммутатором, второй вход третьего компаратора подключен к четвертому входу блока управления коммутатором, выход первого компаратора соединен с первыми входами первого и второго элементов 2И и через первый элемент НЕ с первыми входами третьего и четвертого элементов 2И, вькод второго компаратора соединен с вторыми входами первого и четвертого элементов 2И и через второй элемент НЕ с вторыми входами второго и третьего элементов 2И, п.ервые входы пятого и шестого элементов 2И подключены к выходу первого элемента 2И, первые входы седьмого и восьмого элементов И подключены к выходу второго элемента 2И, первые входы девятого и десятого элементов 2И подключены к выходу третьего элемента 2И, первые входы одиннадцатого и двенадцатого элементов 2И под- ключены к выходу четвертого элемента 2И, выход третьего компаратора соединен со вторыми входами шестого, седьмого, десятого и одиннадцатого
5
0
-
0
5
0
5 0
112
элементов 2И и через третий элемент НЕ - с вторыми входами пятого, восьмого, девятого и двенадцатого элементов 2И, первый и второй входы первого элемента 2liJIH соединены с выходами соответственно шестого и седьмого элементов 2И, первый и второй входы второго элемента 2ИЛИ соединены с выходами соответственно восьмого и девятого элементов 2И, первый и второй входы третьего элемента 2ИЛИ соединены с выходами соответственно десятого и одиннадцатого элементов 2И, первым, вторьм, третьим, четвертым и пятым выходами блока управления коммутатором являются соответственно выходы пятого элемента 2И, первого, второго и третьего элементов 2ИЛИ и двенадцатого эле- иента 2И, блок формирования сигнала скорости содержит последовательно соединенные первый сумматор, первый вход которого является первым входом блока формирования сигнала скорости, первьш интегратор, второй сумматор, второй интегратор, третий сумматор, третий интегратор и четвертый сумматор, второй вход которого является вторым входом блока формирования сигнала скорости, - а выход подключен к вторым входам первого, второго и третьего сумматоров, посдеователь- но соединенные четвертый компаратор, первьй вход которого объединен с вторым входом четвертого сумматора, а вход является третьим входом блока формирования сигнала скорости, триггер, второй вход которого является четвертым входом блока формирования сигнала скорости, и блок выборки-хранения, второй вход которого соединен с выходом третьего сумматора, а выход является выходом блока формирования сигнала скорости, выходы первого и второго интеграторов соединены соответственно с третьим и четвертым входами первого сумматора.
KLZ
В.}
.Ч-/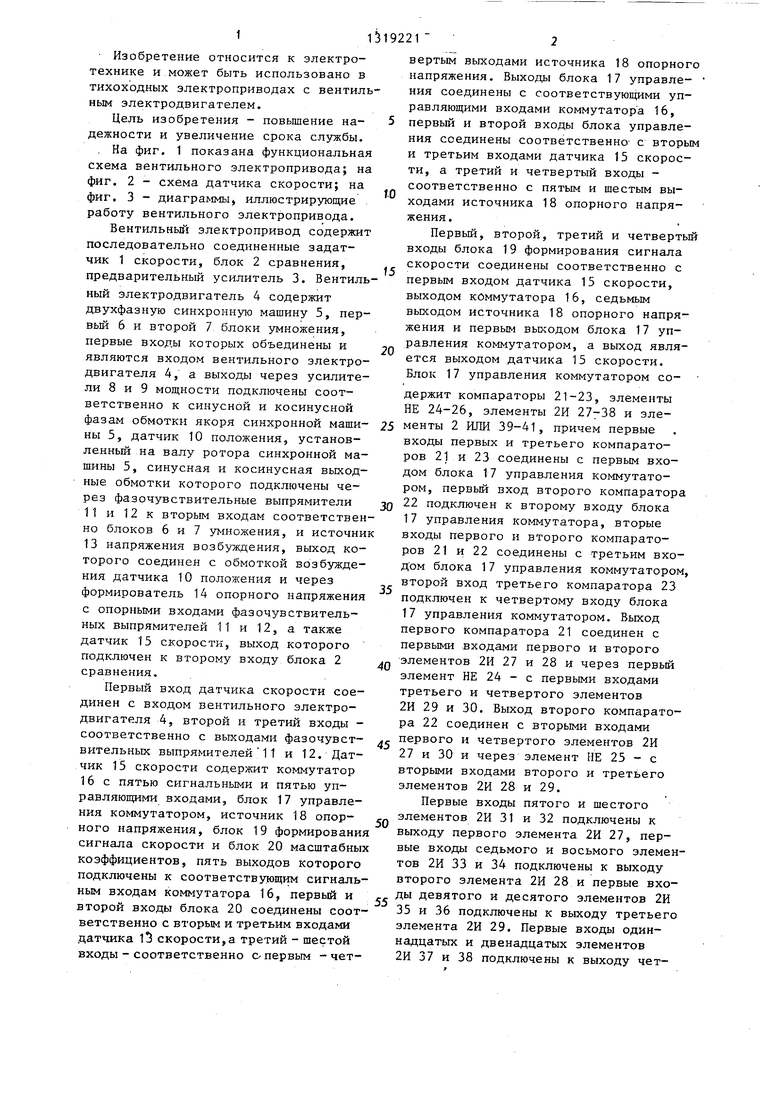
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1300412A2 |
| Вентильный электродвигатель | 1985 |
|
SU1336186A1 |
| Электропривод переменного тока | 1989 |
|
SU1757041A1 |
| Устройство для управления вентильным электродвигателем, выполненным на базе синхронной машины | 1987 |
|
SU1636978A1 |
| Электропривод постоянного тока | 1988 |
|
SU1610584A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
Изобретение относится к электротехнике. Целью изобретения является повышение надежности и увеличение срока службы. Указанная цель дости- гается тем, что в вентильном электроприводе датчик 15 скорости выполнен с тр)емя входами, первый из которых соединен с входом вентильного электродвигателя 4, а второй и третий входы датчика 15 соединены соответственно с выходами фазочувстви- тельных выпрямителей 11 и 12 вентильного электродвигателя 4. Датчик 15 составлен из коммутатора 16, блока 17 управления коммутатором, источника 18 опорного напряжения, блока 20 масштабных коэффициентов и блока 11 формирования сигнала скорос- ти. Указанное выполнение датчика скорости приводит к упрощению схемы электропривода. 3 ил. г (Л
(itifedHee HctfiifitwtHu iisHHifmumopa)
4 u«,5
Составитель A. Головченко Редактор A. Сабо Техред В.Кадар Корректор В. Бутяга
Заказ 2526/53
Тираж 660
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113033, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| БЕСКОНТАКТНЫЙ РЕВЕРСИРУЕМБШ РЕГУЛИРУЕМЫЙПРИВОД | 0 |
|
SU253226A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Машина для выделения семян, например, чая из коробочек | 1932 |
|
SU32248A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
