Изобретение относится к автоматизации сварочных процессов и может быть использовано при автоматическом ведении сварочной головки по разделанному стыку.
Цель изобретения - расширение функциональных возможностей устройства и улучшение качества сварных соединений путем повышения точности позиционирования сва- рочной головки.
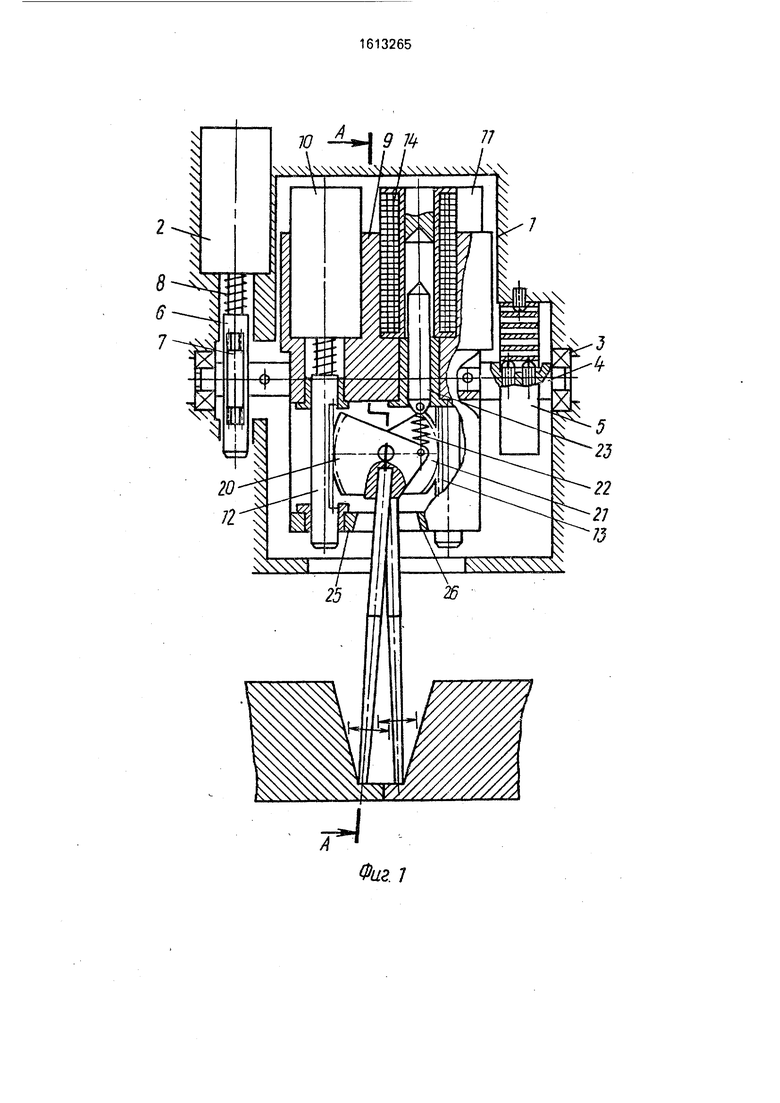
На фиг, 1 изображена механическая часть устройства для управления положением сварочной головки, общий вид; на фиг. 2 - разрез А-А на фиг.1,- на фиг. 3 - функциональная схема устройства для управления положением сварочной головки.
Механическая часть устройства, представляющая собой датчик ориентации, содержит корпус 1, жестко соединенный с суппортом перемещения сварочной головки.
в котором установлены дифференциально- трансформаторный преобразователь 2 и в подшипниках 3 качения ось 4, которая подпружинена с помощью спиральной пружины 5 кручения, один конец которой закреплен на оси 4, а второй - на корпусе 1. Сердечник 6 преобразователя 2 выполнен в виде зубчатой рейки, входящей в зацепление с зубчатым колесом 7, установленным на оси 4. Зазоры в зубчатом зацеплении выбираются пружиной 8. На оси 4 жестко закреплена рамка 9, в которой установлены дифференциально-трансформаторные преобразователи 10 и 11, сердечники 12 и 13 которых выполнены в виде подпружиненных зубчатых реек, тяговый электромагнит 14 и ось 15, на которой установлены с возможностью проворачивания одна относительно другой две втулки 16 и 17 с
СО 4D Оч СЛ
закрепленными в них щупами 18 и 19, Щупы представляют собой перекрещивающиеся двуплечие рычаги, вторыми плечами которых являются зубчатые сектора 20 и 21, входящие в зацепление с зубьями сердечников 12 и 13. Верхнее плечо щупа 18 через демпферную пружину 22 соединено с ллунже- .ром 23 электромагнита 14, Во втулках 16 и 17 закреплены концы цилиндрической пружины 24 кручения,
Кромки 25 и 26 отверстия в дне рамки 9 являются упорами, ограничивающими амплитуду разведения 18 и 19, а винты 27 установлены в корпусе 1 и определяют предельные углы поворота рамки 9 вокруг оси 4,
Электронная часть устройства для управления положением сварочной головки содержит три нормирующих усилителя 28- 30, первый 31 и второй 32 коммутаторы, третий компаратор 33, блок 34 вычитания, последовательно соеди ю, первый сумматор 35, второй компаратор 36 и эпемет 37 задержки, а также четвертый и пятый компараторы 38 и 39, элемент ИЛИ 40, первый компаратор 41, блок 42 памяти, пер- вый, третий и четвертый триггеры 43-45, четвертый коммутатор 46, пятый и второй Триггеры 47 и 48, второй сумматор 49, третий коммутатор 50, пульт 51 управления, блок 52 индикации, элемент 1А 53, шестой триггер 54 и элемент И-НЕ 55. Выход элемента И-НЕ 55 соединен с
вторым входом первого коммутатора 31, вход которого подключен к выходу первого нормирующего усилителя 28, к первому входу первого сумматора 35 м второму входу пятого компаратора 39. Выход второго нормирующего усилителя 29 связан с вторым входом первого сумматора 35 и первым входом второго коммутаторе 32. Второй вход последнего соединен с выходом первого триггера 43 и первым входом элемента 14- НЕ 55, второй вход которого подключен к первому выходу пульта 51 управления. Второй выход пульта 51 управления связан с первыми входами четвертого м пятого компараторов 38 и 39, третий выход соединен с первым входом третьего коммутатора 50. Выхо/i второго коммутатора 32 подключе - к вторым входам блока 34 вычитания и четвертого компаратора 38. Выходы четвертого и пятого компараторов 38 и 39 связаны соответственно с первым и вторым входами элемента ИЛИ 40. Первый вход блока 52 индикации соединен с выходом первого сумматора 35, второй вход подключен к выходу блоке 34 вычитания, первому входу первого компаратора 41 и второму входу четвертого коммутатора 46.. третий вход связан с выходом третьего нормирующего усилителя 30, первый входом третьего коммута- тора 33 и первым входом второго сумматора 49; четвертый вход соединен с
выходом третьего триггера 44 и первым входом элемента И 53, а пятый вход подключен к выходу четвертого триггера 45 и первому входу четвертого коммутатора 46. Вторые входы первого-, второго и третьего компара0 торов 41, 36, 33 связаны с земляной шиной устройства. Первый вход блока 42 памяти соединен с выходом первого компаратора 41 и входом шестого триггера 54, второй вход подключен к выходу второго компара5 тора 36, третий вход связан с выходом третьего компаратора 33, четвертый вход соединен с выходом шестого триггера 54, пятый вход подключен к первому выходу пульта управления, шестой вход соединен с
0 выходом .элемента 37 задержки, первый выход подключен к вторым входам второго и пятого триггеров 48 м 47, второй и третий выходы подключены соответственно к первому и второму входу первого триггера 43,
5 четвертый выход связан с входом третьего триггера 44, пятый выход соединен с первым входом второго триггера 48, 1иестой выход подключен к первому входу пятого триггера 47. Выход второго триггера 48 свя0 зан с вторым входом третьего коммутатора 50, выход которого соединен с вторым входом второго сумматора 49. Выход элемента 14 53 подключен к входу четвертого триггера 45, Второй вход элемента 1/1 53 связан с
5 выходом элемента ИЛИ 40. Блок 42 памяти представляет собой постоянное запомина- юш.ее устройство, предварительно запрограммированное. Блок 42 памяти выполняет функции дешифратора команд, т.е. в зави0 симости рт кодов, поступающих на его входы, выбираются та или иная ячейка блока 42 памяти, состояние которой определяет алгоритм функционирования устройства, В качестве первого, второго и пятого триггеров
5 используются триггеры, имеюш.ие установочные входы, в остальных триггерах задействован счетный вход.
Устройство для управления положением сварочной головки работает следующим
0 образом.
В исходном положении сварочная головка с жестко связанным с ней датчиком ориентации установлена над поверхностью свариваемого изделия и справа от зоны раз5 делки. Рамка 9 под воздействием спиральной пружины 5 кручения повернута относительно вертикальной оси на некоторый угол, величина которого определяется положением упорных винтов 27. Щупы 18 и 19 под воздействием пружины 24 разведены на максимальную амплитуду и опущены. При этом на выходах нормирующих усилителей 28-30, связанных соответственно с дифференциально-трансформаторными преобразователями 2,10,11, формируются макси- мальные сигналы, уровни которых определяются характеристиками дифференциально-трансформаторных преобразователей 2,10,11 и коэффициентом усиления нормирующих усилителей 28-30. Последние выполнены с регулируемым коэффициентом усиления, что облегчает формирование идентичных характеристик на выходах нормирующих усилителей 28 и 29. С выходов нормирующих усилителей 28 и 29 сигналы, являющиеся сигналами от- (слонения щупов 18 и 19 от вертикальной оси, через открытые первый и второй коммутаторы 31 и 32 поступают на входы блока 34 рычитания. Выходной сигнал последнего через открытый четвертый коммутатор 46 воздействует на привод горизонтального перемещения сварочного электрода. В рассматриваемом положении щупов 18 и 19, Т.е. при их симметричном максимальном разведении с помощью пружины 24, сигнал ф)а выходе блока 34 вычитания равен нулю. Сигнал с выхода третьего нормирующего усилителя 30 поступает на первый вход второго сумматора 49 и с выхода последнего на привод вертикального переме- шения сварочной головки. Сварочная головка вместе с датчиком ориентации перемещается вниз по направлению к изделию. После касания щупами 18 и 19 поверхности изделия рамка 9 начинает по- рорачиваться вокруг оси 4 (против часовой стрелки). С помощью зубчатого колеса 7 это (Вращательное движение преобразуется в поступательное перемещение сердечника . После того как рамка 9, а следовательно, И сердечник 6 занимают определенное положение, щупы 18 и 19 поджимаются к по- рерхности изделия спиральной пружиной 5 Кручения. Фиксацию этого положения опре- (Деляет величина выходного сигнала третье- го нормирующего усилителя 30. Нулевое значение указанного сигнала определяет третий компаратор 33, выходной сигнал которого воздействует на третий вход блока 42 памяти. Блок 42 памяти является дешиф- ратором команд, т.е. в зависимости от. состояния его входов на его выходах формируются кодовые комбинации. Блок 42 памяти предварительно запрограммирован и после этого постоянно находится в режи- ме считывания. Сигнал с уровнем логической единицы на третьем входе блока 42 памяти при нулевых уровнях сигналов на остальных входах блока 42 памяти вызывает появление следующей кодовой комбинации
. на его выходах: второй, четвертый и пятый выходы - состояние логического нуля, на остальных - уровни логических единиц.
Сигнал с пятого выхода блока 42 памяти устанавливает второй триггер 48 в единичное состояние, выходной сигнал которого по второму входу открывает третий коммутатор 50. Напряжение с второго выхода пульта 51 управления, снимаемое с дифференциально-трансформаторного преобразователя 2, поступает на второй вход второго сумматора 49 и далее на привод вертикального перемещения, в результате чего сварочная головка вместе с датчиком ориентации просаживается несколько ниже зафиксированного нейтрального положения. Это дополнительное перемещение вер- тикального привода ведет к довороту рамки 9, в результате поверхности изделия касается только один щуп 19, а щуп 18 зависает над поверхностью на высоте нескольких миллиметров. Эта операция необходима для надежной и безопасной работы при поиске разделки.
Одновременно сигнал с уровнем логического нуля с второго выхода блока 42 памяти воздействует на первый вход первого триггера 43, устанавливая последний в нулевое состояние. Сигнал с уровнем логического нуля с выхода первого триггера 43 закрывает второй коммутатор 32. Это отключает выход второго нормирующего усилителя 29 от второго входа блока 34 вычитания, на выходе которого появляется сигнал рассогласования (сигнал отклонения с щупа 19). Этот сигнал через открытый чет- вертый комутатор 46 проходит на привод горизонтального перемещения, происходит перемещение влево сварочной головки ЛЗ датчиком ориентации и отслеживание щупом 19 поверхности изделия.
При попадании в зону разделки щуп 19 просаживается на величину, заданную с пульта 51 управления дифференциально-трансформаторным преобразователем 2. Вместе с ним на ту же величину опускается сварочная головка, ее дальнейшие перемещения вниз невозможны, так как щуп 18 касается поверхности изделия и начинает ее отслеживание, т.е. уровень сигнала на выходе второго сумматора 49 контролируется.
При достижении левой кромки щуп 19 утыкается в нее и начинает поворачиваться вокруг оси 15. Это вращение с помощью зубчатого сектора 20 преобразуется в поступательное перемещение сердечника 12, что ведет к уменьшению уровня сигнала на выходе первого нормирующего усилителя 28. При вертикальном положении щупа 19 (т.е. при его нейтральном положении)указанный
сигнал принимает нулевое значение. Это ведет к срабатыванию первого компаратора 41 и появлению сигнала с уровнем логмче- ОКОЙ единицы на первом входе блока 42 памяти.
Кодовая комбинация на входах блока 42 памяти, при которой на его первом входе сигнал с уровнем логической единицы и с нулевыми уровнями на остальных входах ведет к обращению к ячейке блока 42 памяти, в которой записаны логические нули в четвертом и шестом разрядах, а в остальных - логические единицы. Сигнал с шестого выхода блока 42 памяти воздействует на первый установочный вход пятого триггера 47, устанавливая последний в единичное состояние. Выход -10й сигнал п -ггого триггера 47 воздействует на контактор включения напряжения питания тягового электромагнита 14. В результате плунжер 23 через жесткую демпферную пружину 22 принудительно начинает перемещать щуп 18 до его вертикального нейтрального положения, т.е. щуп 18 соскальзывает с поверхности изделия в разделку. Таким образом, оба щупа 1.8 и 19 соскальзывают на дно разделки и занимают вертикальное положение. При .этом выходной сигнал первого сумматора 35 приним а- ет нулевое значение, что ведет к срабатыванию второго компаратора 36 и формированию сигнала с уровнем логической единицы на втором входе блока 42 памяти. Аналогичный сигнал появляется на выходе элемента 37 задержки и на шестом входе блока 42 памяти. Временная задерж- ка, осуществляемая элементом 37 задержки, определяется временем уверенного заглубления щупов 18 и 19 в разделку, т.е. инерционностью механических элементов датчика ориентации. Формирование сигна- лов на втором и шecтo.i входах блока 42 памяти вызывает появление сигнала на его первом выходе, который устанавливает второй и пятый триггеры 47 и 48 по их вторым входам в исходное нулевое-состо- яние, а также сигналы на третьем выходе блока 42 памяти, который устанавливает в единичное состояние первый триггер 43. В ре зультате выполнения указанных действий отключается напряжение питания с обмоток тягового электромагнита 14, снимается напряжение смещения с ференциально-трансформаторного преобразователя 2 и выход второго нормирующего усилителя 32 подключается к вто- рому входу блока 34 вычитания.
В результате снятия условий принудительного перемещения шд/па 18 до его вертикального положения, он стремится занять свое исходное положение, а результате
5 0 5 0 5 0 0 5
5
выходной сигнал блока 34 вычитания через открытый четвертый коммутатор 46 начинает воздействовать на привод горизонтального перемещения.
Под действием пружины 15 кручения щупы 18 и 19 стремятся занять такое положение, при котором выходной сигнал блока 34 вычитания принимает нулевое значение. Это соответствует симметричному положению щупов 18 и 19 относительно середины стыка. После этого срабатывает первый компаратор 41, и на первом входе блока 42памяти устанавливается сигнал с уровнем логической единицы.
Рабочее расстояние сварочной головки до дна разделки, как и раньше, определяется сигналом срабатьтания третьего компаратора 33, т.е. логическая единица на первом и третьем входах блока 42 памяти, при нулевых значениях сигналов на его остальных входах является условием для выбора очередной ячейки блока 42 памяти. Эта ячейка содержит в четвертом разряде логи- ческу о единицу, которая устанавливает третий триггер 44 о единичное состояние. Сигнал с выхода последнего поступает на четвертый вход блока 52 индикации и зажигает сигнальную лампу Начало сварки . Этот сигнал используется также для включения сварочного источника.
Одновременно сигнал с выхода третьего триггера поступает на первый вход элемента И 53, разрешая прохождение через него сигнала с выхода элемента ИЛИ 40. Последний сигнал формируется в случаях превышения заданной ширины разделки над текущим значением. Это необходимо при выполнениях.косметического, прохода, т.е. когда разделка заполнена наплавлен- ным металлом и щупы 18 и 19 вышли из разделки. В последнем случае формируется сигнал на выходах четвертого или пятого компараторов 38 и 39, который через логические элементы устанавливает четвертый триггер 45 в нулевое состояние, что закрывает четвертый коммутатор 46. В результате привод горизонтального перемещения сварочной головки отключается от управляющих сигналов слежения. Одновременно сигнал с выхода четвертого триггера 45 поступает на шестой вход блока 52 индикации и используется для визуализации, данного процесса.
Для сварки изделий с широкой разделкой, выполняемых с колебаниями сварочной головки, устройство позволяет точно зафиксировать взаимное положение сварочного электрода и кромок. Это достигается поочередным фиксированием вертикального, нейтрального положения того 1цупа, в сторону которого происходит перемещение сварочной головки и соответственно отключением другого щупа от участия в формировании управляющих воздействий на привод горизонтального перемещения. Это достигается организацией раздельного режима работы первого и второго коммутаторов 31 и 32 и срабатыванием первого компаратора 41. Наличие сигнала логической единицы на пятом входе блока 42 памяти определяет указан- ный режим. Как указывалось , после нахождения дна разделки и установки в симметричном положении щулов-18 и 19 срабатывает первый компаратор 41, который воздействует на счетный вход шестого триггера 54, устанавливая в единичное состояние. Таким образом, комбинация логических сигналов на входах блока 42 памяти, из которых первый, четвертый и пятый входы имеют уровни логических единиц, определяет выходное состояние блока 42 памяти. При этом, сигнал с второго выхода блока 42 памяти устанавливает первый триггер 43 в нулевое состояние, отключая второй коммутатор 32. На выходе блока 34 вычитания присутствует сигнал только от левого щупа 19. Этот сигнал проходит на привод горизонтального перемещения и происходит смещение влево сварочной головки вместе с датчиком ориентации. При достижении левой кромки щуп 19 занимает нейтральное (вертикальное) положение, срабатывает первый компаратор .41, устанавливая пятый триггер 54 в нулевое состояние. На первом, четвертом и пятом входах блока 42 памяти изменяется состояние четвертого входа. Это вызываегформирование на выходах блока 42 памяти сигнала, который устанавливает первый триггер 43 в еди- ничное состояние, открывая второй коммутатор 32. Два логических сигнала с уровнем логической единицы на входахзле- мента И-НЕ 55 вызывают формирование на его выходе нулевого сигнала, который закрывает первый коммутатор 31, начинается поиск правой кромки и т.д. Блок52 индикации является средством визуального контроля оператором процесса сварки. Так, по сигналам на его втором, третьем четвертом и пятом входах срабатывают обычные сигнальные индикаторы.
Использование в устройстве узла сведения щупов 18 и 19 трех дифференциально- трансформаторных преобразователей 2,10,11, а также логических элементов позволяет автоматизировать цикл поиска начального положения сварочной головки, обеспечивает высокую точность управления положением сварочной головки в разделке.
Устройство может найти применение при построении систем управления многокоординатным сварочным манипулятором. Технико-зкономическая эффективность устройства заключается в том, что вследствие повышения точности позиционирования сварочной головки и автоматизации подготовительных операций повышается качество сварных швов и производительность
работы.
Формула изобретения
Устройство для управления положением сварочной головки, содержащее корпус, рамку, два перекрещивающихся подпружиненных щупа, установленных на рамке и .выполненных в виде двуплечих рычагов, верхние плечи которых связаны с соответствующими датчиками положения щупов от- носительно одной оси, а также два нормирующих усилителя, входы которых соединены с соответствующими выходами датчиков положения, первый сумматор и
блок вычитания, первый и второй компараторы, блок памяти, элемент задержки и блок индикации, при этом выходы первого и второго нормирующих усилителей подключены соответственно к первому и второму
входам первого сумматора, выход последнего связан с первым входом второго компаратора, второй вход которого соединен с земляной шиной устройства, выход второго компаратора подключен к входу элемента
задержки, выход блока вычитания связан с первым входом первого компаратора, вто- рой вход последнего соединен с земляной шиной устройства, выходы первого и второго компараторов подключены соответственно к первому и второму входам блока памяти, первый и второй входы блока индикации связаны соответственно с выходами первого сумматора и блока вычитания, отличающееся тем, что, с целью расширения функциональных возможностей устройства и улучшения качества сварного соединения путем повышения точности позиционирования сварочной головки, каждый датчик положения щупов выполнен в
виде дифференциально-трансформаторно- го преобразователя с подвижным подпружиненным сердечником, который через зубчатую реечную передачу кинематически связан с верхним плечом щупа, а также введены узел сведения щупов, узел измерения расстояния, третий нормирующий усилитель, третий, четвертый и пятый компараторы, четыре коммутатора, элемент ИЛИ, элемент И, элемент И-НЕ, шесть триггеров, второй сумматор и пульт управления, при
этом узел сведения щупов оснащен закрепленным на рамке злектромагнитом. плунжер которого через демпферную пружину связан с верхним плечом одного из щупов, а узел измерения расстояния выполнен в виде подпружиненной поворотной оси, оснащенной спиральной пружиной, одним концом закрепленной на оси, а другим - в корпусе, и третьего дифференциально-трансформаторного преобразователя, подвижный подпружиненный сердечник которого посредством зубчатой реечной передачи соединен с поворотной осью, при этом рамка установлена на оси, выход третьего нормирующего усилителя соединен с третьим входом блока индикации и с первыми входами второго сумматора и третьего компаратора, второй вход последнего подключен к земляной шине устройства, выход третьего компаратора связан с третьим входом блока памяти, первый выход пульта управления соединен с пятым входом блока памяти, второй выход пульта управления подключен к первым входам четвертого и пятого компараторов, третий выход пульта управления связан с первым входом третьего компаратора, вь-ход первого нормирующего усилителя соединен с первым входом первого коммутатора, выход которого подключен к первому входу блока вычитания, вторые входы блока вычи- тания и четвертого компаратора связаны с выходом второго коммутатора, первый вход последнего соединен с выходом второго нормирующего усилителя, выход элемента ИЛИ подключен к второму входу элемента И, шестой вход блока памяти связан с выходом элемента задержки, первый вы)од блока памяти подключен к вторым входам второго и пятого триггеров, второй и третий выходы блока памяти связаны соответственно с первым и вторым выходами первого триггера, четвертый выход блока памяти соединен с входом третьего триггера, пятый выход блока памяти подключен к первому входу второго триггера, шестой выход блока памяти связан с первым входом пятого триггера, выход третьего триггера соединен с первым входом элемента И и четвертым входом блока индикации, пятый вход последнего подключен к выходу четвертого триггера, вход которого связан с выходом элемента И, вход шестого триггера соединен с выходом первого компаратора, а выход шестого триггера подключен к четвертому входу блока памяти, выход четвертого триггера соединен с первым входом четвертого коммутатора, второй вход которого подключен к выходу блока вычитания, выход второго триггера подключен к второму входу третьего коммутатора, выход которого связан с вторым входом второго сумматора, выходы четвертого и пятого компараторов соединены соответственно с первым и вторым входами элемента ИЛИ, первый вход элемента И-НЕ подключен к выходу первого триггера, второй вход элемента И-НЕ связан с первым входом пульта управления, а выход элемента И-НЕ соединен с первым входом первого коммутатора, второй вход второго компаратора подключен к выходу первого триггера.
7/

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СВАРОЧНОЙ ГОРЕЛКИ | 2004 |
|
RU2278770C1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ ИНФОРМАЦИИ И УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СВАРОЧНОГО ЭЛЕКТРОДА | 2003 |
|
RU2240903C1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СВАРОЧНЫМ ТОКОМ ПРИ МНОГОПРОХОДНОЙ СВАРКЕ | 2003 |
|
RU2250811C1 |
| Устройство для контроля настройки музакальных инструментов | 1985 |
|
SU1290405A1 |
| Установка для присоединения проволочных выводов | 1991 |
|
SU1815083A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| Устройство для измерения качества канала тональной частоты | 1985 |
|
SU1283987A1 |
| Установка для микросварки | 1991 |
|
SU1834770A3 |
| Цифровой вольтметр | 1985 |
|
SU1337791A1 |

Изобретение относится к автоматизации сварочных процессов и может быть использовано при автоматическом ведении сварочной головки по разделанному стыку в многокоординатных сварочных манипуляторах. Цель изобретения - расширение функциональных возможностей устройства и улучшения качества сварных соединений путем повышения точности позиционирования сварочной головки. Устройство содержит корпус, три дифференциально-трансформаторных преобразователя с подвижными подпружиненными сердечниками, служащими в качестве датчиков положения щупов. Выходы дифференциально-трансформаторных преобразователей связаны с входами электронного блока слежения за стыком. В устройство введены узел сведения щупов, узел измерения расстояния. Электронный блок слежения за стыком обеспечивает точную фиксацию взаимного положения сварочного электрода и кромок стыка, позволяет автоматизировать цикл вывода сварочной головки в исходное для сварки положение. 3 ил.
ФагЛ
А-А
tr
| Устройство для управления положением сварочного электрода | 1983 |
|
SU1166940A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
