Изобретение относится к транспортному машиностроению, а именно к органам управления рулевыми механизмами безрельсовых транспортных средств, и может быть использовано преимущественно на тракторах, большегрузных автомобилях и самоходных машинах.
Цель изобретения - улучшение удобства управления транспортным средством путем обеспечения информации о величине угла поворота управляемых колес.
На фиг. 1 схематично изображено рулевое управление в сборе; на фиг. 2 - механизм отклонения рулевого колеса в сторону поворота; на фиг. 3 - схема отклонения рулевого колеса относительно сиденья оператора. Рулевое управление транспортного средства содержит рулевое колесо 1, соединенное с рулевым механизмом (не показан) с помощью рулевого вала, который состоит из верхней 2 и нижней 3 частей, соединен- ных карданным шарниром 4. Верхняя часть 2 рулевого вала установлена внутри опорного элемента 5. Для осуществления регулировки положения релевого колеса 1 в продольной центральной плоскости 6 кресла 7 оператора опорный элемент 5 имеет выступающие вперед дугообразные скользящие элементы 8, которые входят с возможностью свободного относительного перемещения в направляющие 9, закрепленные на несущем элементе 10 кабины или кузова транспортного средства вместе с фиксатором 11, предназначенным для фиксации скользящих элементов 8 в направляющих 9. Регулировка положения рулевого колеса по высоте производится путем изменения длины верхней части 2 рулевого вала. Для этого имеется приспособление (не показано) в виде разрезной втулки (цанги), управляемой с помощью маховичка 12. Кроме того, рулевое управление содержит внутри опорного элемента 5 механизм отклонения рулевого колеса в сторону поворота, который включает в себя направляющую 13, гиб- кийтрос 14 и пружину 15. Трос 14 несколько раз охватывает рулевой вал 2 и прижимает его под действием пружины 15 к направляющей 13. Направляющая 13 имеет криволинейную форму рабочей поверхности (фиг. 2). Рулевое управление работает следующим образом.
Предварительно производится регулировка положения рулевого колеса 1 относительно кресла 7 по высоте в углу наклона в соответствии с размерами (антропометрическими данными) конкретного челбвека оператора. Для изменения положения рулевого колеса по высоте необходимо отвернуть расположенный на нем маховичо
12, установить рулевое колесо 1 в удобное для водителя положение, затем маховичок 12 завернуть. Для изменения положения рулевого колеса по углу наклона необходимо разбло- кировать стопорное устройство, установить требуемый наклон рулевого колеса 1 и произвести стопорение в выбранном положении.
В процессе управления транспортным средством оператор (водитель) поворачива- 0 ет за рулевое колесо 1 верхнюю часть 2 рулевого вала. Крутящий момент, создаваемый усилиями оператора на рулевом колесе 1, передается далее через карданный шарнир 4 и нижнюю часть 3 рулевого вала к 5 рулевому механизму, который преобразует вращающий момент в тяговое или толкающее усилие на тягах, которые воздействуют на рычаги рулевой трапеции. Последние закреплены на поворотных цапфах и повора- 20 чивают их на требуемый угол вместе с установленными на них колесами вокруг шкворневых осей.
При повороте рулевого колеса 1 одна ветвь гибкого троса 14 сматывается, другая 25 одновременно наматывается на верхнюю часть 2 рулевого вала. За счет фрикционного взаимодействия гибкого троса 14 с рабочей поверхностью рулевого вала 2 происходят плавное перемещение последнего по направ- 30 ляющей 13 и поворот вместе с рулевым колесом 1 вокруг карданного шарнира 4. При этом рулевое колесо 1 отклоняется от продольной центральной плоскости 6 кресла 7 оператора в сторону осуществления поворота. 35Формула изобретения
Рулевое управление транспортного средства, содержащее рулевой механизм, кинематически связанный с рулевым колесом посредством рулевого вала, состоящего 40 из двух частей, соединенных между собой карданным шарниром, опорный элемент, внутри которого установлена с возможностью поворота верхняя часть рулевого вала и устройство для фиксации положения опор- 45 ного элемента относительно рамы транспортного средства, отличающееся тем, что, с целью улучшения удобства управления путем обеспечения водителю информации о величине угла поворота управляемых 50 колес, оно снабжено механизмом отклонения рулевого колеса в сторону поворота, смонтированного внутри опорного элемента и выполненного в виде направляющей с- криволинейной формой рабочей поверхно- 55 сти и гибкого троса, охватывающего верхнюю часть рулевого вала и закрепленного своими концами, один из которых подпружинен на опорном элементе для обеспечения обкатывания верхней части рулевого вала по направляющей при его повороте.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ВОДИТЕЛЯ | 1992 |
|
RU2106278C1 |
| Устройство управления транспортным средством | 1984 |
|
SU1273285A1 |
| ТРЕНАЖЁР ДЛЯ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2715325C1 |
| КОЛЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2423281C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2125943C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| АМФИБИЯ | 2007 |
|
RU2520665C2 |
| ПАРОМ ДЛЯ АВТОМОБИЛЯ, УПРАВЛЯЕМЫЙ ЕГО ВОДИТЕЛЕМ | 2003 |
|
RU2233229C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2004 |
|
RU2279628C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ РЕЕЧНОГО ТИПА | 2016 |
|
RU2724941C1 |
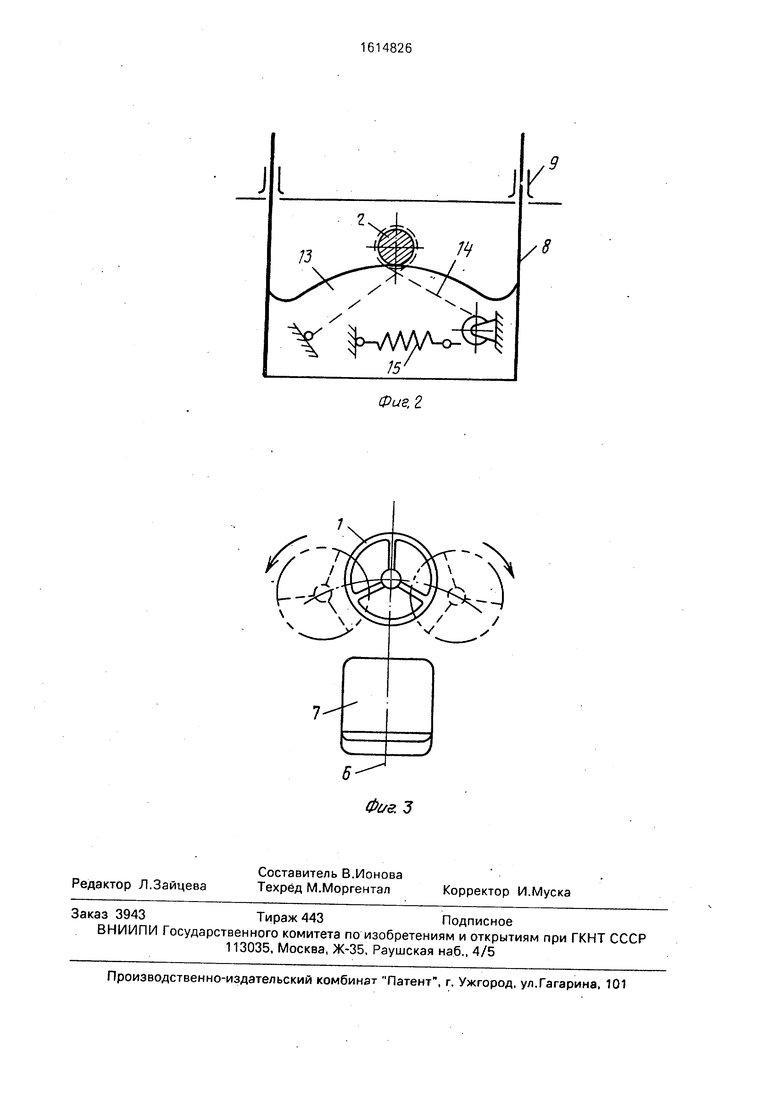
Изобретение относится к транспортному машиностроению, а именно к органам управления рулевыми механизмами безрельсовых транспортных средств, и может быть использовано преимущественно на тракторах, большегрузных автомобилях и самоходных машинах. Целью изобретения является улучшение удобства управления путем обеспечения водителю информации о величине угла поворота управляемых колес. Рулевое управление содержит рулевое колесо 1, опорный элемент 5 механизма отклонения рулевого колеса в сторону поворота транспортного средства, включающий направляющую, гибкий трос и пружину. Трос несколько раз охватывает верхнюю часть 2 рулевого вала и прижимает его под действием пружины к направляющей. При повороте рулевого колеса 1 одна ветвь гибкого троса сматывается, одновременно другая наматывается на верхнюю часть 2 рулевого вала. За счет фрикционного взаимодействия гибкого троса с рабочей поверхностью рулевого вала происходят плавное перемещение последнего по направляющей и поворот вместе с рулевым колесом 1 вокруг карданного шарнира 4. При этом рулевое колесо 1 отклоняется от продольной центральной плоскости кресла 7 оператора в сторону осуществления поворотом. 3 ил.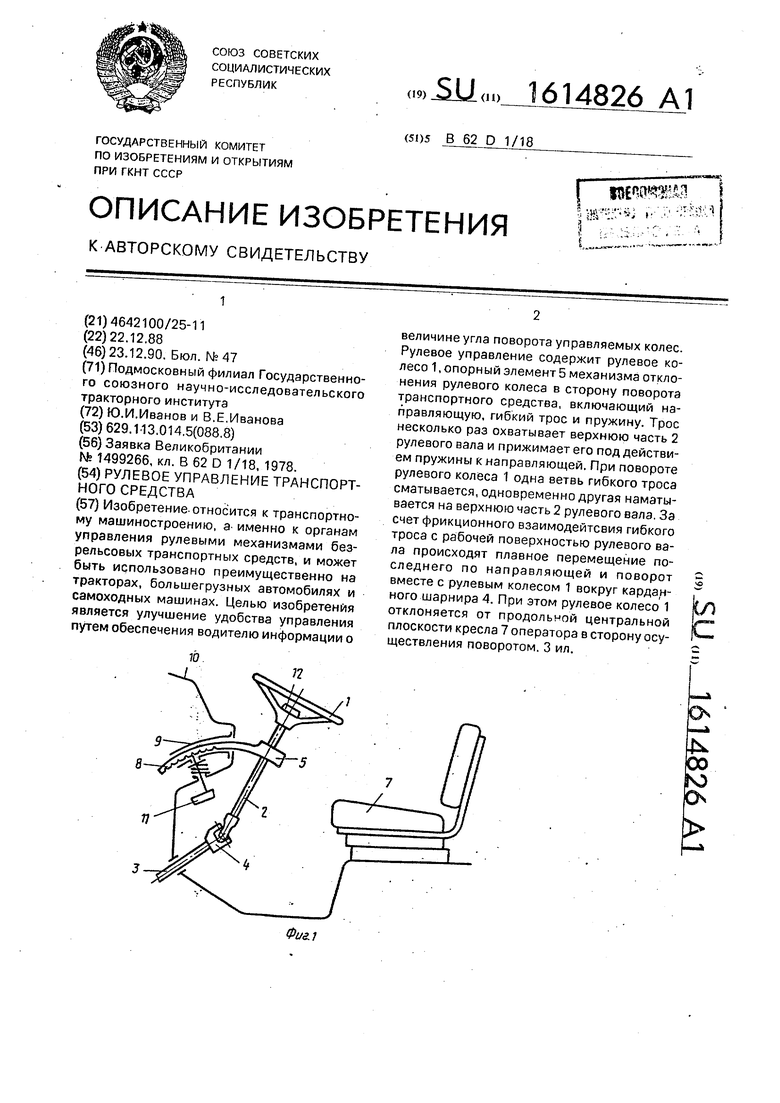
/3
2v 1
J
/
Фие.2
