Изобретение относится к области учебных моделей и тренажеров, а именно, к устройствам, обеспечивающие моделирование условий при движении, наиболее приближенных к условиям движения в транспортном средстве, и может быть использовано при обучении водительским навыкам.
Известен гоночный симулятор для управления транспортными средствами по гоночной трассе, содержащий экран, видеопроектор, капсулу игрока с блоком имитации органов управления капсулой и гидравлической управляемой платформой, компьютер, вертикальную стойку шкафного типа, привод вертикального перемещения (см. патент РФ №51775, МКИ G09B 9/02, опубл. 2006 г.).
Основным недостатком гоночного симулятора является отсутствие возможности установки различных транспортных средств для большего погружения обучающегося в процесс обучения, т.е. обучающийся может занимать место только в однотипной капсуле.
Известен гоночный симулятор обучения управлению транспортными средствами, содержащий стандартные органы управления автомобилем на рабочем месте обучаемого, электромеханическую динамическую платформу модуля водителя, компьютер и акустическую систему, систему вибрации, широкоэкранную систему визуализации (см. патент РФ №108682, МКИ G09B 9/02, опубл. 2011 г.).
В процессе работы такого симулятора осуществляется достоверная имитация поведения различных видов автомобилей в экстремальных условиях, а также отсутствие необходимости наблюдения инструктора для контроля безопасности работы тренажера и оценки действий испытуемого.
Основным недостатком симулятора является применение стандартных органов управления транспортным средством и отсутствие возможности создания условий для большего погружения обучающегося в процесс обучения на конкретном транспортном средстве.
Технической задачей, на решение которой направлена полезная модель, является обеспечение условий при моделировании движений, наиболее приближенных к условиям движения различных реальных транспортных средств, имитируемых на тренажере.
Решение поставленной технической задачи достигается тем, что в тренажере для имитации движения транспортного средства, содержащем связанные между собой неподвижную и подвижную платформы, из которых последняя снабжена приводами изменения ее положения, рабочий модуль водителя, размещенный на подвижной платформе и оснащенный креслом и штатными органами управления с имитацией обратной связи в виде рулевого колеса, педалей тормоза и газа, рычагами переключения передач на рулевом колесе, систему визуализации, воспроизводящую дорожную обстановку в виде, по меньшей мере, фронтального экрана с видеопроектором, размещенных на стойках, и систему управления элементами тренажера в виде блока управления, источника питания и компьютера согласно полезной модели при имитации движения на подвижной платформе в качестве рабочего модуля водителя установлено реальное транспортное средство, сменяемое при необходимости, а связь неподвижной и подвижной платформ выполнена с помощью карданного шарнира и приводных тяг, связанных с валами приводов изменения положения подвижной платформы, при этом блок управления и приводы жестко закреплены на нижней платформе, а валы приводов снабжены датчиками их положения, подключенными к блоку управления.
На решение поставленной технической задачи направлено также то, что колеса транспортного средства выполнены свободными от контакта с опорной поверхностью и отключены от привода транспортного средства.
Тренажер предусматривает сменяемость модели транспортного средства, в результате чего расширяются возможности тренажера для тренинга водителей в условиях движения на различных реальных и конкретных транспортных средствах.
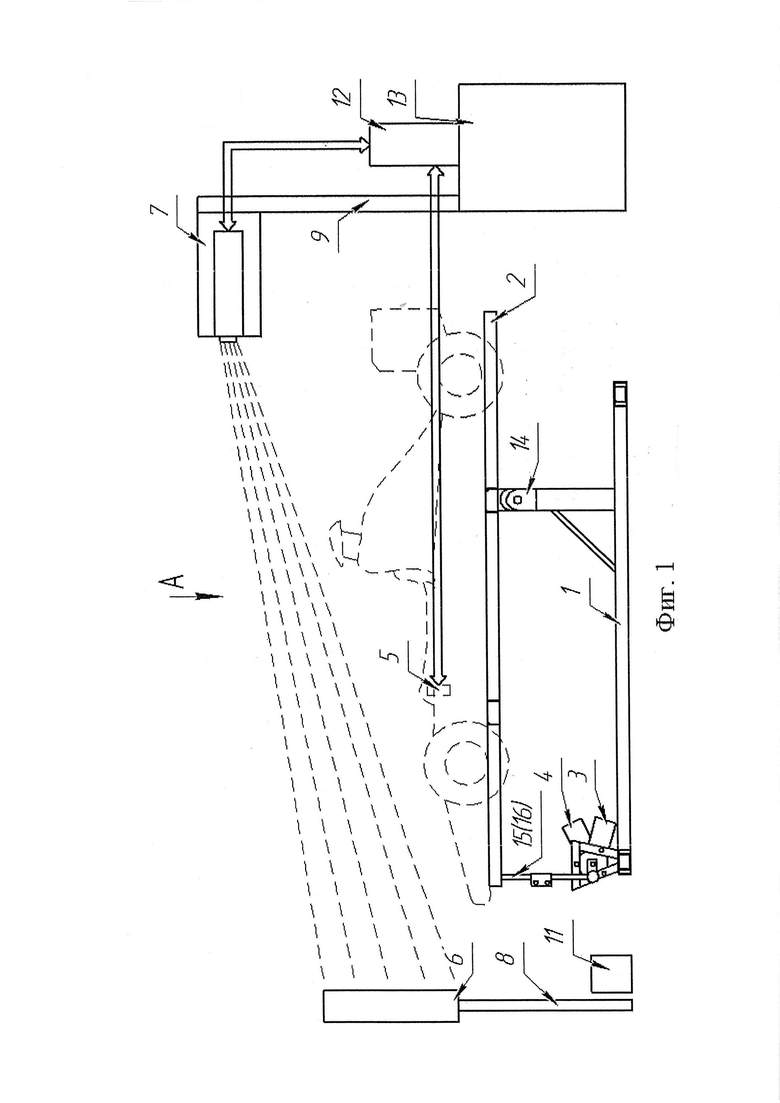
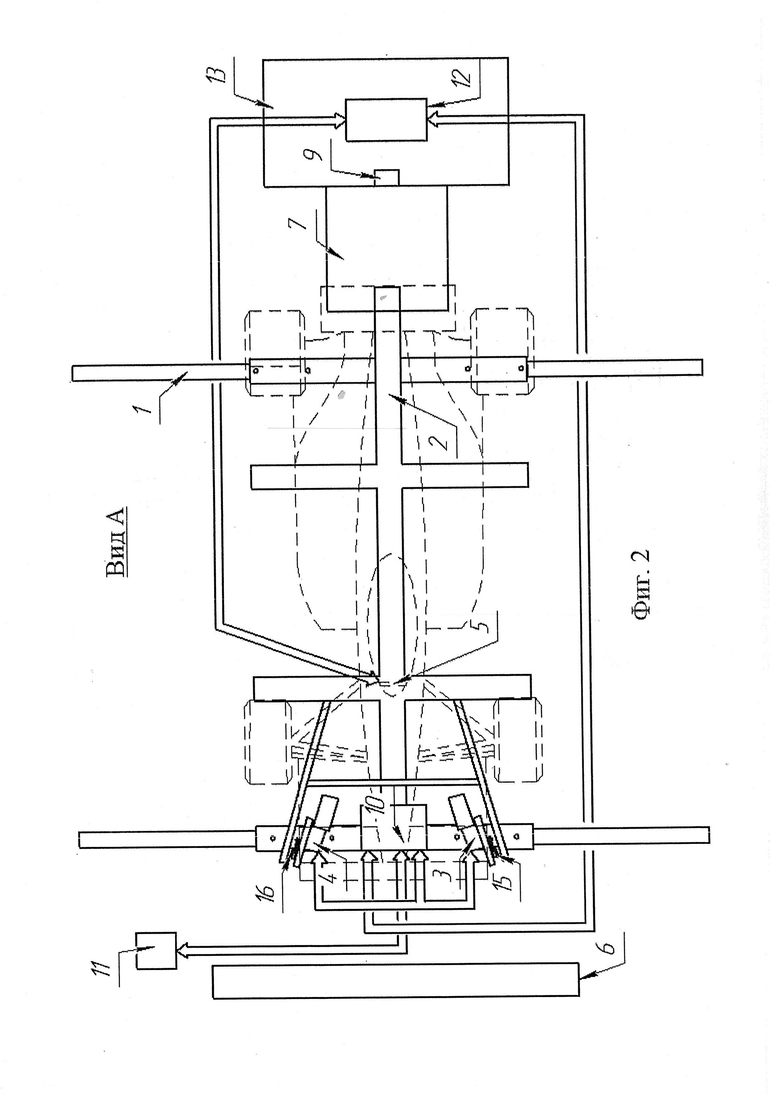
Предлагаемое устройство поясняется чертежами, где на фиг. 1 - приведена схема тренажера для имитации движения транспортного средства (вид сбоку); на фиг. 2 - изображен вид А на фиг. 1.
На чертежах двойными линиями со стрелкой обозначена электрическая связь системы управления и элементов тренажера.
Тренажер для имитации движения транспортного средства содержит связанные между собой соответствующие неподвижную и подвижную платформы 1 и 2, из которых последняя снабжена приводами 3, 4 изменения ее положения. Рабочий модуль 5 водителя размещен на подвижной платформе 2 и оснащен креслом и штатными органами управления с имитацией обратной связи в виде рулевого колеса, педалей тормоза и газа, рычагами переключения передач на рулевом колесе (на чертеже не показаны). Для воспроизводства дорожной обстановки предусмотрена система визуализации в виде, по меньшей мере, фронтального экрана 6 с видеопроектором 7, размещенных на стойках 8, 9, а также система управления элементами тренажера в виде блока 10 управления, источника 11 питания и компьютера 12, установленного на столе 13. Согласно полезной модели при имитации движения на подвижной платформе 2 в качестве рабочего модуля 5 водителя установлено реальное транспортное средство, сменяемое при необходимости, а связь неподвижной и подвижной платформ 1 и 2 выполнена с помощью карданного шарнира 14 и приводных тяг 15, 16, связанных с валами приводов 3, 4 изменения положения подвижной платформы 2. При этом блок 10 управления и приводы 3, 4 жестко закреплены на нижней платформе 1, а валы приводов 3, 4 снабжены датчиками их положения (на чертеже не показаны), подключенными к блоку 10 управления. Причем колеса транспортного средства выполнены свободными от контакта с опорной поверхностью и отключены от привода транспортного средства.
Предлагаемое устройство функционирует следующим образом.
На подвижную платформу 2 устанавливается реальное транспортное средство той или иной модели, в которой обучающийся занимает место водителя. Блок 10 управления через USB кабель подключается к компьютеру 12 с установленным программным обеспечением Live For Speed; и специальным ретранслятором цифровых сигналов. Компьютер 12 через USB кабель подключается к рабочему модулю 5 водителя, т.е. к штатным органам управления реального транспортного средства - рулевому колесу, педалям тормоза и газа, рычагам переключения передач на рулевом колесе. Блок 10 управления подключается к источнику 11 питания напряжением 24 В постоянного тока. Запустив программное обеспечение Live For Speed и специальный ретранслятор цифровых сигналов, включается тумблер питания приводов 3, 4 на блоке 10 управления. После обработки сигналов от компьютера 12 и блока 10 управления через приводы 3 и 4 с датчиками положения вала и приводные тяги 15, 16 приводится в движение подвижная платформа 2. При работе тренажера согласно программе имитируются условия движения реального транспортного средства той или иной модели, а именно, продольные и поперечные наклоны транспортного средства, характеризующие движение по качественному дорожному полотну или по бездорожью, что позволяет отрабатывать у обучающихся навыки управления в режиме разгона, торможения, при поворотах с использованием рулевого колеса, педалей тормоза и газа, рычагов переключения передач при необходимости учета при управлении дорожной обстановки, воспроизводимой с помощью экрана 6 и видеопроектора 7.
Поскольку тренажер предусматривает сменяемость модели транспортного средства, постольку расширяются возможности тренажера для тренинга водителей в условиях движения на различных реальных и конкретных транспортных средствах.
Предлагаемое устройство с небольшой трудоемкостью монтажа и простотой реализации предлагаемой конструкции позволит простыми средствами повышать навыки вождения у обучающихся. Данный тренажер для имитации движения транспортного средства может изготавливаться в промышленных масштабах.
Таким образом, изобретение обеспечивает условия при моделировании движений, наиболее приближенных к условиям движения реальных транспортных средств, имитируемых на тренажере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обучения приемам управления четырехколесным внедорожным мототранспортным средством (квадроциклом) и тренажер для его реализации | 2024 |
|
RU2830015C1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Учебное устройство для дозирования усилия на педаль сцепления транспортного средства при начале движения | 2022 |
|
RU2805237C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| СПОСОБ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403942C1 |
| АВТОБУСНЫЙ ТРЕНАЖЕР | 2011 |
|
RU2467400C1 |
| ДИНАМИЧЕСКИЙ СТЕНД-ТРЕНАЖЕР УСТОЙЧИВОГО ВОЖДЕНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2694427C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
Изобретение относится к области учебных моделей и тренажеров, а именно к устройствам, обеспечивающим моделирование условий при движении, наиболее приближенных к условиям движения в транспортном средстве, и может быть использовано в испытательных лабораториях и при обучении водительским навыкам. Тренажер для имитации движения транспортного средства содержит связанные между собой соответствующие неподвижную и подвижную платформы, из которых последняя снабжена приводами изменения ее положения. В конструкции предусмотрены система визуализации, воспроизводящая дорожную обстановку в виде фронтального экрана с видеопроектором, размещенных на стойках, и система управления элементами тренажера в виде блока управления, источника питания и компьютера. При имитации движения на подвижной платформе в качестве рабочего модуля водителя установлено реальное транспортное средство, сменяемое при необходимости, а связь неподвижной и подвижной платформ выполнена с помощью карданного шарнира и приводных тяг, связанных с валами приводов изменения положения подвижной платформы. При этом блок управления и приводы жестко закреплены на нижней платформе, а валы приводов снабжены датчиками их положения, подключенными к блоку управления. Повышается начальный уровень подготовки водителя. 2 ил.
Тренажер для имитации движения транспортного средства, содержащий связанные между собой неподвижную и подвижную платформы, из которых последняя снабжена приводами изменения ее положения, рабочий модуль водителя, размещенный на подвижной платформе и оснащенный креслом и штатными органами управления с имитацией обратной связи в виде рулевого колеса, педалей тормоза и газа, рычагами переключения передач на рулевом колесе, систему визуализации, воспроизводящую дорожную обстановку, в виде, по меньшей мере, фронтального экрана с видеопроектором, размещенных на стойках, и систему управления элементами тренажера в виде блока управления, источника питания и компьютера, отличающийся тем, что при имитации движения на подвижной платформе в качестве рабочего модуля установлено реальное транспортное средство, сменяемое при необходимости, а связь неподвижной и подвижной платформ выполнена с помощью карданного шарнира и приводных тяг, связанных с валами приводов изменения положения подвижной платформы, при этом блок управления и приводы жестко закреплены на нижней платформе, а валы приводов снабжены датчиками их положения, подключенными к блоку управления, причем колеса транспортного средства выполнены свободными от контакта с опорной поверхностью и отключены от привода транспортного средства.
| Устройство для поддерживания обувных колодок на каретке конвейера | 1956 |
|
SU108682A1 |
| ИМИТАТОР ДОРОЖНЫЙ ТРЕНАЖЁРА ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2652696C2 |
| U 6354838 B1, 12.03.2002 | |||
| Безглинистый буровой раствор | 1990 |
|
SU1776687A1 |

