Изобретение относится к строительно- дорожному машиностроению, преимущественно к автогрейдерам.
Цель изобретения - улучшение управляемости автогрейдера.
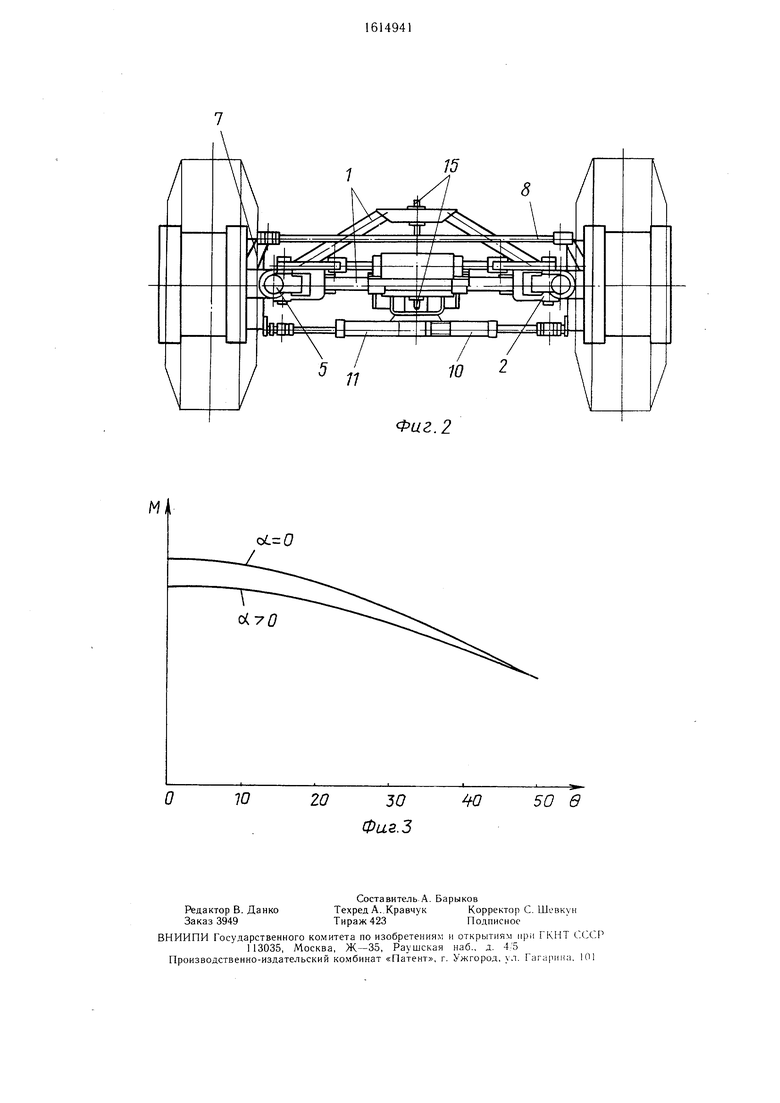
На фиг. 1 изображен унравляемый мост, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 - график (в) в зависимости от угла наклона цилиндра (где М - момент, создаваемый гидроцилиндрами поворота для поворота колес;©- угол поворота колеса).
Управляемый мост автогрейдера содержит балку 1, кинематически связанную посредством пшрниров 2 наклона с вертикально расположенными левым и правым рычагами 3 наклона колес 4, на концах каждого из которых размещены, щарниры 5 поворота, кинематически связанные с соот- ветствуюплими цапфами 6 колес 4, с которыми с одной стороны жестко связаны поворотные рычаги 7, щарнирно соединенные .между собой посредством поперечной рулевой тяги 8 трапеции, а с другой стороны -- рычаги 9, к которым шарнирно подсоединены штоки гидроцилиндров 10 и 1 поворота, корпусы которых шарнирно закреп- лены па балке 1 моста, а каждый рычаг 3 наклона колес 4 шарниром 12 соединен через поперечные тяги 13 со двухштокового гидроцилиндра 14 корпус которого жестко закреплен
штоками наклона, на балке
1 моста. В центре балки 1 моста пре- дусмотрен гпарнир 15 для установки автогрейдера на мост.
С целью улучшения управляемости автогрейдера шарниры крепления штоков гидроцилипдров 10 и 11 поворота к рычагам 9 колес 4 в положении колес 4, соответствующем прямолинейному движению автогрейдера, расположены соосно с шарнирами 2 наклона. Это также сделано для того, чтобы при повороте колес 4 от положения, соответствующего прямолинейному движению автогрейдера, обеспечить наименьший поворот в шарнире крепления штока, так как в шаровой опоре угол поворота ограничен.
С целью улучшения управляемости авто- Грейдера и улучшения устойчивости системы благодаря тому, что улучшается (спрямляется) зависимость (в), а также для увеличения максимального угла поворота колес 4, без увеличения колеи моста оси гидроцилиндров 10 и 11 поворота расположены косо-симметрично и наклонно относительно горизонтальной оси моста, про-хо- дящей через шарниры крепления щтоков гидроцилиндров 10 и,1 поворота.
Углы наклона осей гидроцилиндров 10 и I1 поворота колес 4 выбраны в пределах от 5 до 12°. Минимальный угол, равный 5°, определился конструктивно из
0
0
о
5
5
5
0
условия предельного сближения цилиндров друг с другом. Максимальный угол, равный 12°, определился из условия вписывания цилиндров в контур балки 1 моста, соблюдая требуемый клиренс машины. Для увеличения сцепления колес 4 в поперечном направлении колеса 4 наклоняются в ту или другую сторону посредством механизма наклона, гидроцилиндр 14 которого воздействует на рычаг 3 наклона колес 4 через поперечную тягу 13 и через цапфу б на колесо 4.
Механизм поворота колес 4 осуществляет поворот колес 4 в обе стороны, для чего рабочая жидкость привода поворота подается в порщневую полость одного и штоко- вую другого гидроцилиндров 10 и 11 поворота колес 4 одновременно. Штоки гидроцилиндров 10 и 11 воздействует через шарниры рычагов 9 на цапфы 6 колес 4, связанных поперечной тягой 8 рулевой трапеции, и осуществляется поворот колес 4 относительно вертикального шарнира 5, выполненного в рычагах 3 наклона колес и цапфах 6.
Формула изобретения
. Управляемый мост автогрейдера, содержащий балку, кинематически связанную посредством шарниров наклона колес с вертикально расположенными левым и пра- вЫм рычагами наклона колес, на концах каждого из которых размещены шарниры поворота колес, кинематически связанные с соответствующими цапфами колес, с которыми с одной стороны жестко связаны поворотные рычаги, шарнирно соединенные между собой посредством поперечной рулевой тяги трапеции, а с другой шарнирно подсоединены штоки гидроцилиндров поворота колес, корпусы которых шарнирно закреплены на балке управляемого моста, а каждый рычаг наклона колес иларнирно соединен через поперечные тяги со штоками двухштокового гидроцилиндра наклона колес, корпус которого жестко закреплен на балке моста, отличающийся тем, что, с целью улучшения управляемости автогрейдера, шарниры крепления штоков гидроцилиндров поворота колес в положении колес, соответствующем прямолинейному движению автогрейдера, расположены соосно с шарнирами наклона колес, а оси гидроцилиндров поворота расположены косо- симметрично и наклонно относительно горизонтальной оси моста, проходящей через шарниры крепления штоков гидроцилиндров поворота колес.
2. Мост автогрейдера по п. 1, отличающийся тем, что углы наклона осей гидроцилиндров поворота колес выбраны в пределах от 5 до 12°.
Фиг. 2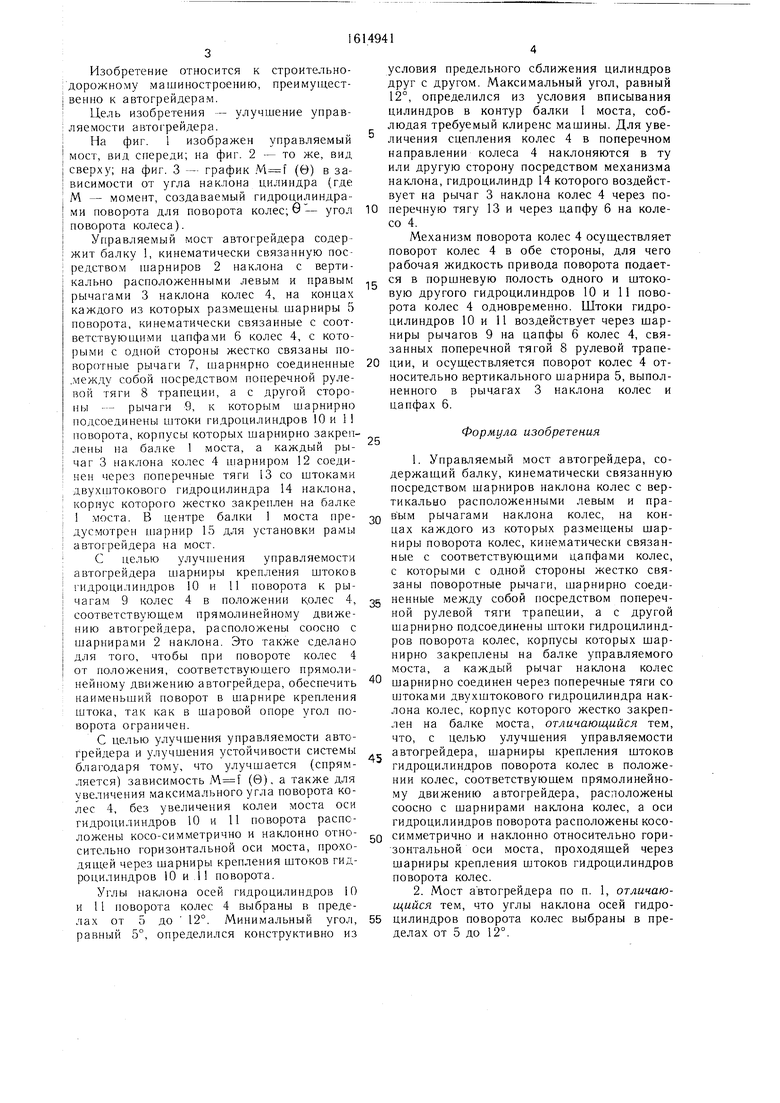
Изобретение относится к машиностроению. Цель изобретения - улучшение управляемости автогрейдера. Управляемый мост содержит балку 1, по концам которой установлены рычаги 3 наклона колес 4. К рычагам 3 шарнирно подвешены колеса 4 с обеспечением их наклона и поворота соответственно гидроцилиндром 14 наклона колес 4 и гидроцилиндрами 10 и 11 поворота колес 4, шарнирно установленными на балке 1 моста и через шарниры связанными с рычагами 9 поворота, укрепленными на цапфах 6 колес 4. Гидроцилиндры 10 и 11 поворота колес 4 установлены так, что шарниры крепления штоков гидроцилиндров 10 и 11 поворота в положении колес 4, соответствующем прямолинейному движению автогрейдера, расположены соосно с шарнирами наклона, а оси гидроцилиндров 10 и 11 поворота - косо-симметрично и наклонно относительно горизонтальной оси моста, проходящей через шарниры крепления штоков гидроцилиндров 10 и 11 поворота. Это позволяет увеличить ход и длину цилиндров поворота и угол поворота управляемых колес, а также иметь различные углы наклона колес без воздействия на положение управляемых колес в плане, соответствующее прямолинейному движению машины
уменьшить установочную мощность системы поворота или, при прочих равных условиях, снизить производительность насоса системы рулевого управления и тем самым улучшить устойчивость системы рулевого управления. При этом углы наклона осей гидроцилиндров поворота колес выбраны в пределах от 5 до 12°. 1 з.п.ф-лы, 3 ил.
70
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
