Изобретение относится к транспортным средствам, в частности к системе управления и улучшения ходовых качеств двухсекционного сочлененного вездеходного транспортного средства и его трансмиссии.
Известен "Мост транспортного средства" по описанию изобретения к а.с. СССР 1585201, класс МПК В 62 D 9/00, опубликовано в БИ 30 15.08.90 г. (1).
Данный мост предназначен для улучшения управляемости транспортного средства за счет стабилизации движения управляемых колес при действии случайных нагрузок на колеса.
Мост содержит управляемые колеса 1, установленные на поворотных шкворнях 2, связанные с гидроцилиндром 5, который гидравлически соединен с упругим демпфирующим устройством 6. При действии боковых сил момент этих сил передается на шток гидроцилиндра 5, обеспечивая разницу давлений в полостях устройства 6, смещение штока управляющего гидроцилиндра, а следовательно, поворот управляемых колес 1 по направлению углу увода колес моста транспортного средства.
Недостатком данного моста транспортного средства является то, что он обеспечивает лишь путевую устойчивость транспортного средства, а не является фактором, обеспечивающим выполнение поворотов транспортного средства.
Целью предлагаемого изобретения является создание системы управления двухсекционного сочлененного вездеходного транспортного средства и его трансмиссии, которые обеспечивали бы максимальную простоту конструкции всей системы управления, а также существенные усовершенствования и трансмиссии вездехода.
Указанная цель достигается следующим образом.
Колеса транспортного средства выполнены сферическими. Колеса укреплены на горизонтально расположенных шарнирах, а оси шарниров расположены в продольной плоскости транспортного средства. При этом оси шарниров каждой пары колес расположены со смещением на определенную величину относительно центра сферы колеса к наружной стороне каждого колеса.
Наклон левого и правого колеса каждого из двух мостов осуществляется трапециями автомобильного типа, установленными в вертикальной плоскости и перпендикулярно направлению движения транспортного средства.
В предлагаемой конструкции трансмиссии вездехода предусмотрена передача вращения (крутящего момента) на колеса от двигателя посредством, например, гибких валов и встроенных в каждое колесо понижающих обороты редукторов. При этом данная трансмиссия выполнена без дифференциалов.
В качестве отдаленного аналога предлагаемому изобретению можно принять "Мост транспортного средства" по источнику информации (1).
На фиг.1 изображен мост транспортного средства предлагаемой системы управления двухсекционного сочлененного вездеходного транспортного средства при прямолинейном движении.
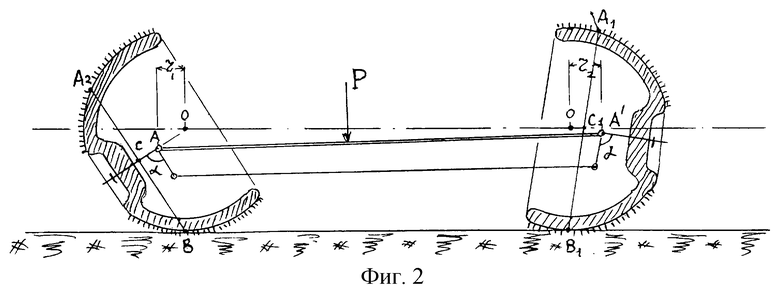
На фиг. 2 - то же, при повороте влево моста по ходу движения транспортного средства.
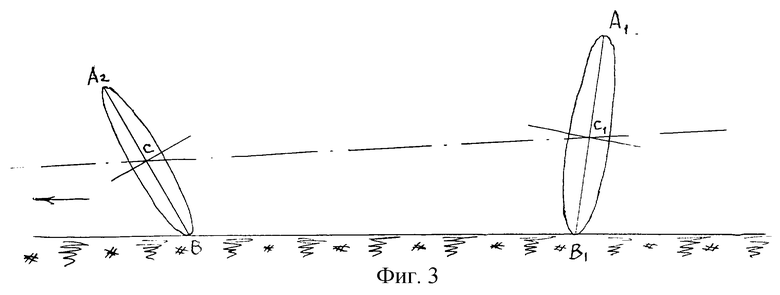
На фиг.3 изображен схематический чертеж расположения плоскостей колеса, проходящих через точки касания каждого колеса с поверхностью дороги.
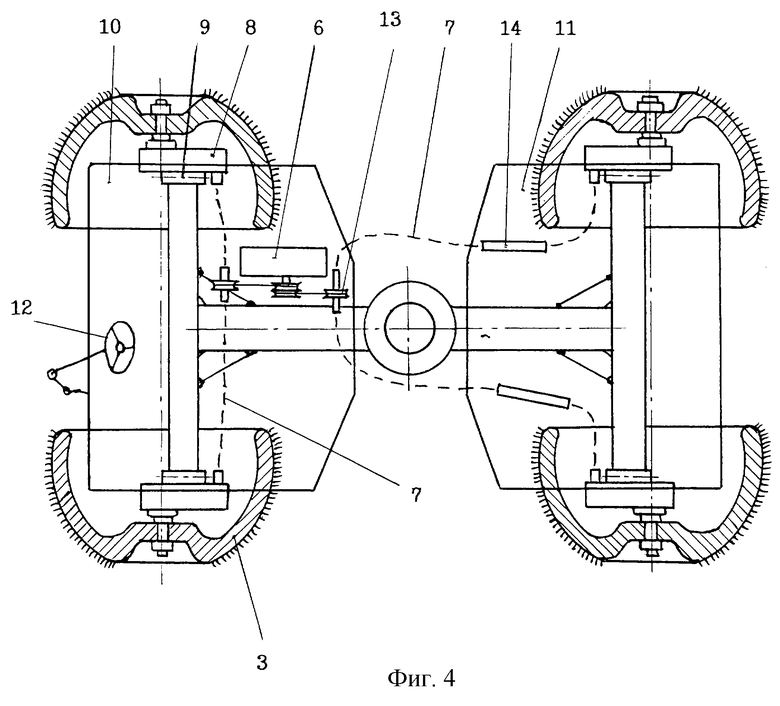
На фиг. 4 изображена общая компоновка колес и трансмиссии транспортного средства.
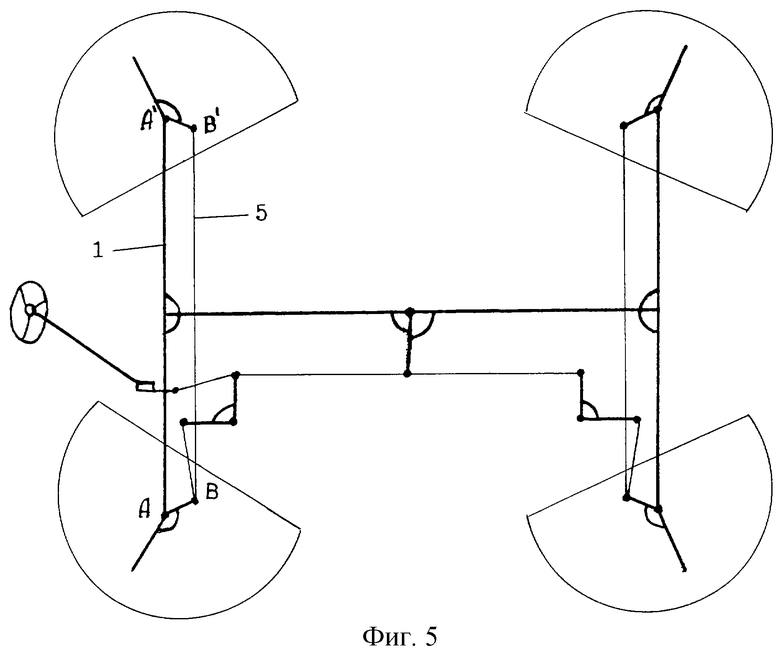
На фиг. 5 изображена схема расположения тяг предлагаемой системы управления при прямолинейном движении (для наглядности трапеция управления условно расположена в плоскости чертежа).
На фиг.6 - то же, что и на фиг.5, но при повороте (по одной из возможных схем управления транспортным средством).
Предлагаемая система управления двухсекционного сочлененного вездеходного транспортного средства и его трансмиссия состоят из следующих узлов, агрегатов и деталей.
На балке 1, например, переднего моста транспортного средства укреплены два горизонтальных шарнира А и А' (фиг.1), установленных в продольной плоскости. Ось 2 колеса 3 неподвижно скреплена с рычагом 4 под определенным углом α.
Концы рычагов 4 каждого колеса скреплены тягой 5 для образования трапеции управления, а трапеция управления расположена в вертикальной плоскости. Оси 2 колес 3 наклонены на небольшой угол β вниз относительно балки 1 для улучшения характеристик управления. Например, при повороте транспортного средства влево, на левом колесе происходит уменьшение диаметра А2-В качения колеса, а на правом колесе в этом же случае происходит увеличение диаметра качения колеса A1-В1. При этом нарастание разницы диаметров правого и левого колес происходит быстрее, нежели, когда оси 2 были бы расположены горизонтально.
Предлагаемая конструкция сочлененного вездехода состоит их четырех колес 3 сферического профиля (фиг.4). Вращение на колеса от двигателя 6 передается системой гибких валов 7 без дифференциалов с понижающими редукторами 8, встроенными в колеса. На колесах имеются только горизонтальные шарниры 9, расположенные в продольной плоскости транспортного средства, позволяющие колесам наклоняться только в вертикальной поперечной плоскости движения вездехода.
Передняя часть 10 сочлененного двухсекционного вездеходного транспортного средства шарнирно соединена с задней частью 11. На передней части 10 укреплен руль управления 12. Передача крутящего момента от двигателя 6 на гибкие валы 7 осуществляется через передаточный механизм 13. На отдельных прямолинейных участках гибкие валы могут быть сочленены с помощью негибких (жестких) валов 14.
Наклон левого и правого колеса каждого из двух мостов осуществляется трапециями автомобильного типа, установленными в вертикальной плоскости (фиг. 1, 2, 5, 6). В связи с этим наклоны левого и правого колеса каждого из двух мостов будут разниться (отличаться) (см. фиг.2). Вследствии разницы наклонов колес они будут касаться поверхности дороги разными диаметрами качения, плоскости которых перпендикулярны оси вращения шара (колеса), что приведет к повороту моста транспортного средства в сторону меньшей окружности качения (фиг.2). Так как оба колеса в каждом мосту двигаются по одной и той же поверхности, то происходит как бы построение конуса качения движения каждого моста влево или вправо по ходу, несмотря на то, что оси колес не лежат на одной оси конуса. Происходит обкатывание двух "дисков" А2СВ и A1C1B1 по образующей конуса ВВ1. Вследствие этого происходит поворот системы влево или вправо в зависимости от расположения вершины конуса слева или справа по ходу движения транспортного средства (фиг.2).
В связи с изменением величины r1 и r2 (фиг.2) при повороте образуется восстанавливающий момент прямолинейности движения равный: Р/2•r2-P/2•r1.
На балку 1 (фиг.1 и 2) постоянно действует сила тяжести Р транспортного средства.
При восстановлении равенства наклона колес они переходят на качение по равным окружностям (фиг.1) и система двух колес движется прямолинейно.
Наклоны рулевых трапеций на переднем и заднем мостах вездехода должны быть одинаковы и синхронизированы с углом поворота передней и задней секций вездехода относительно друг друга, что представляет несложную чисто техническую задачу (фиг.5 и 6).
При расположении осей наклона ступиц не в центре сфер колес, а ближе к наружной части колеса, достигается дополнительный наклон рамы с кузовом в сторону поворота (что желательно).
Кроме того, при поворотах возникает восстанавливающий момент прямолинейности движения (фиг.2); на этой фигуре показано внешнее расположение оси от центра шара.
Предлагаемая конструкция управления вездеходом делает его достаточно маневренной машиной, способной разворачиваться с очень малыми радиусами поворота.
При использовании формы колеса как поверхности вращения эллипса (при параметрах эллипса, близких к окружности, то есть фокусы эллипса должны быть достаточно близки друг к другу (очень далеко разнесенные центры эллипса ухудшат управление вездеходом), возможна еще большая стабилизация прямолинейности движения и с меньшими рабочими наклонами осей колес при поворотах; при некотором увеличении площади контакта колеса с поверхностью дороги.
Радиус поворота системы пары колес зависит еще и от расстояния между обкатываемыми окружностями колес, то есть от колесной колеи, чем ближе друг к другу колеса моста, тем с меньшим радиусом может быть произведен поворот системы пары колес при их наклоне.
На предлагаемом вездеходе предусмотрена передача вращения от двигателя на колеса посредством гибких валов. Такие валы достаточно прочны и износостойки. Хотя они и передают небольшие крутящие моменты (порядка 0,5-1,0 кгм при диаметрах от 12 до 16 мм), но при этом могут вращаться с большими угловыми скоростями (порядка 2000-4000 об/мин). Поэтому на колесах применены встроенные понижающие редукторы, дающие возможность получения на осях колес больших крутящих моментов.
Гибкие валы дают возможность отказаться от использования любых карданных передач, в том числе и от карданов равных угловых скоростей, что также существенно упрощает конструкцию предлагаемого транспортного средства. При использовании гибких валов возможно применение вставок из жестких валов там, где гибкие валы проходят прямолинейные участки (фиг.4).
Так как гибкие валы в оплетке ("броне") достаточно шумны и их КПД низок, то их можно применить без "брони" на участках только с изгибом траектории передачи ими вращения. Благодаря возможности прокладки гибких валов практически в любом месте - компоновка вездехода может быть осуществлена достаточно оптимально. Малый вес валов, возможность установки их довольно произвольно, некоторое демпфирование передающих нагрузок, низкая цена, удобство ремонта - все это говорит за их применение в практике.
Предлагаемое вездеходное транспортное средство в отличие от аналога принципиально не нуждается при поворотах в обгонном устройстве колес (дифференциале), так как при повороте колес они (колеса) вращаются с одинаковой угловой скоростью, но при этом каждое колесо катится по поверхности дороги по разным диаметрам качения А2-В и А1-В1.
Литература
1. "Мост транспортного средства" по описанию изобретения к а.с. СССР 1585201, класс МПК В 62 D 9/00, опубликовано в БИ 30 15.08.90 г.
Изобретение относится к транспортным средствам, в частности к системе управления и улучшения ходовых качеств двухсекционного сочлененного вездеходного транспортного средства и его трансмиссии. Сущность изобретения: колеса транспортного средства выполнены сферическими, укреплены на горизонтально расположенных шарнирах, а оси шарниров расположены в продольной плоскости транспортного средства, при этом оси шарниров каждой пары колес расположены со смещением относительно центра сферы колеса к наружной стороне каждого колеса. Наклон левого и правого колес из двух мостов осуществляется трапециями автомобильного типа, установленными в вертикальной плоскости и перпендикулярно направлению движения транспортного средства. В предлагаемой конструкции вездехода предусмотрена передача крутящего момента на колеса от двигателя посредством гибких валов и встроенных в каждое колесо понижающих обороты редукторов. При этом данная трансмиссия выполнена без дифференциалов. Технический результат заключается в упрощении системы управления. 1 з. п.ф-лы, 6 ил.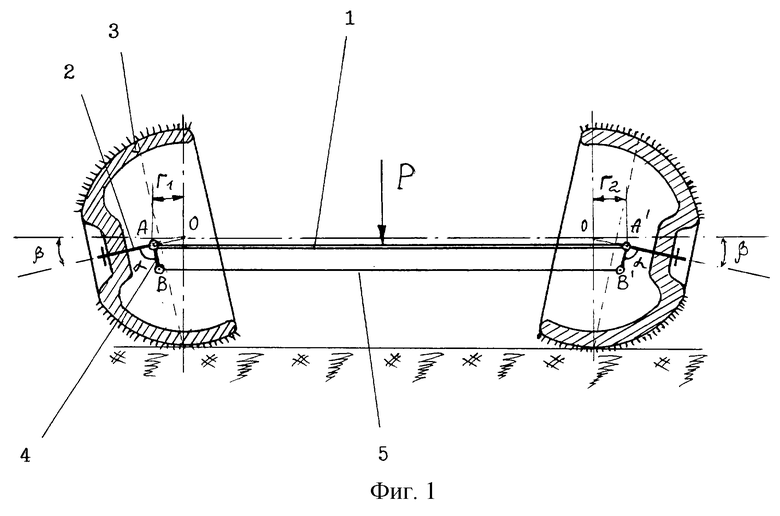
| Мост транспортного средства | 1988 |
|
SU1585201A1 |
| Способ изменения направления движения колесного транспортного средства | 1983 |
|
SU1240675A1 |
| US 4546977 A, 15.10.1985 | |||
| US 4624469 A, 25.11.1986. | |||

