Изобретение относится к моделированию нервных сетей и может быть ис- :ользовано в технической кибернетике, Самоорганизующихся системах управляю- п его воздействия, информационных сис- емах, вычислительной технике, рабо отехняке,
Цель изобретения - повышение дос- оверности моделирования путем обуче- ия необходимым ответным реакциям.
На чертеже представлена функцио- альная схема устройства для моделирования нервной системы, I Устройство состоит из фотодиодной 1 атрицы 1, каждый выход которой через piHy 2 входньк воздействий подключен JC входу одного из каждого ряда обу- ijiaeMbix нейронов 3 первой программной Матрицы 4, имеющей также шины 5 и 6 юложительного и отрицательного под- 1|срепления, двух сумматоров 7, первых Элементов 8 сравнения, дифференцирующих цепочек 9, вторых элементов 10 |:равнения, переключателей 11, обучае- 1ых нейронов второй программной матрицы 12 с шинами 13, 14 положительного и отрицательного подкрепления, л, дифференциальньрс усилителей 15, манипулятора 16, компараторов 17 и блока ;18 эталонных сигналов. Устройство работает в двух режи- йах: обучение и самостоятельное функ- |цианирование.
В режиме обучения работа устройства следующая,
Управляемьй орган манипулятора устанавливают в начальное положение I Входы второй программной матрицы 12 с помощью переключателя 11 подключают к блоку 18 эталонных сигналов. Пода- :вая эталонные сигналы, а также положительные и отрицательные подкрепления по шинам 13 и 14 обучают вторую про- 1 раммную матрицу 12 необходимой ответной реакции. Это обучение можно цповодить последовательно по рядам,
5
0
5
0
5
0
45
0
5
если каждый привод манипулятора 16 будет независимым (т.е. приводов будет столько, сколько степеней свободы у управляемого органа манипулятора). Сигналы с обучаемых нейронов второй программной матрицы 12 после суммирования на сумматорах 7 поступают на дифференциальные усилители 15, благодаря которым они не только возрастают по мощности, но и преобретают возможность реверсировать приводы манипулятора 16, После обучения второй программной матрицы 12 необходимой ответной реакции, обучают первую программную матрицу А, При этом эталонные сигналы поступают как на выходную вторую программную матрицу 12, так и на один из входов компараторов 17. Управляемый орган манипулятора 16 начинает движение, которому обучена вторая программная матрицу 12. В Позиции 1 управляемого органа мани- аулятора 16 сигнал должен возникнуть на первом элементе 8 сравнения. Если же первый ряд обучаемых нейронов 3 первой программной матрицы 4 не обеспечивает этого, то эталонный сигнал опрокидьшает первьй из компараторов 17 так, что на его выходе возникает положительное подкрепление, которое поступает на шину 5 первой программной матрицы 4 и вынуждает обучаемые нейроны 3 вьиать необходи- мьй сигнал. Далее по мере движения управляемого органа манипулятора 16 эталонньй сигнал для первого глемен- та 8 сравнения пропадает. Если же в этот момент первый элемент 8 сравнения выдает сигнал, то последний опрокидывает компаратор 17 и на его выходе возникает уже отрицательное подкрепление и поступает на шину 6 первой программной матрицы 4. Таким образом, одновременно с перемещением управляемого органа манипулятора 16 из позиции I в позицию II компарато-
516
ры 17 следят за соответствием сигнала эталонному сигналу, подавая при необходимости положительные или отрицательные подкрепления на соответст- вуклций ряд обучаемых нейронов 3. Обучение первой программной матрицы 4 проходит до тех пор, пока си1 налы на выходах соответствующих элементов сравнения 8 и 10 не совпадут с эталонными сигналами, что можно установить по нулевому уровню на выходах компараторов 17, Таким образом заканчивается первый этап. В режиме самостоятельного функционирования устройство работает следующим образом.
В позиции I управляемого органа манипулятора 16 оптический сигнал от последнего поступает в блок 1, который преобразует его в электри- .ческий. По шине 2 входного воздействия электрические сигналы поступают во входную матрицу 4. Так как матрица 4 уже обучена, на этот сигнал реагирует только первый ряд обучаемых нейронов 3 и не реагируют все остальные ряды, поэтому в возбужденное состояние приходит первый элемент 8 сравнения, который с помощью обученной матрицы 12 и приводов начинает перемещение управляемого органа манипулятора к позиции II. Во время этого перемещения переходит в возбужденное состояние второй элемент сравнения, который с помощью матрицы 12 и приводов и заканчивает перемещение управляемого органа в позицию II, В этой позиции в возбужденное состояние приходит уже первая схема 8 сравнения, а затем и второй элемент .10 сравнения и так далее. Из последней позиции в начальную управляемый орган манипулятора 16 переводит последний второй элемент 10 сравнения и все на
чикается сн.ччала. Устройство таким образом само собой управляется. При ; этом устройство контролирует как прохождение управляемого органа 16 через определенные позиции, так и скорость и направление перемещения.
Введение второй программной матрицы 12 обучаемых нейронов позволяет разнообразить количество и сложность ответных реакций по сравнению с известным устройством.
Все это позволяет говорить о большей степени приблюкения к реальной нервной системе.
Наконец, модельные эксперименты на предлагаемом устройстве позволят изучить поведение волн возбуждения на нейронах, которые имеют место в живых организмах.
Ф.ормула изобретения
Устройство для моделирования нервной системы, включающее первую программную матрицу, состоящую из моделей обучаемого нейрона, с шинами входных воздействий, положительного и отрицательного подкреплений, выходы которой подсоединеш 1 к первым элементам сравнения, отличающееся тем, что, с целью повышения достоверности моделирования путем обучения необходимым ответным реакциям, в него введены вторая программная матрица,. переключатель, блок эталонных сигналов и вторые элементы сравнения, причем входы второй программной матрицы посредством переключателя могут быть подсоединены или к блоку эталонных сигналов, или к выходу первых и вторьЕх элементов сравнения, а входы вторых элементов сравнения через дифференцирующие эле- менты подсоединены к первой программной матрице.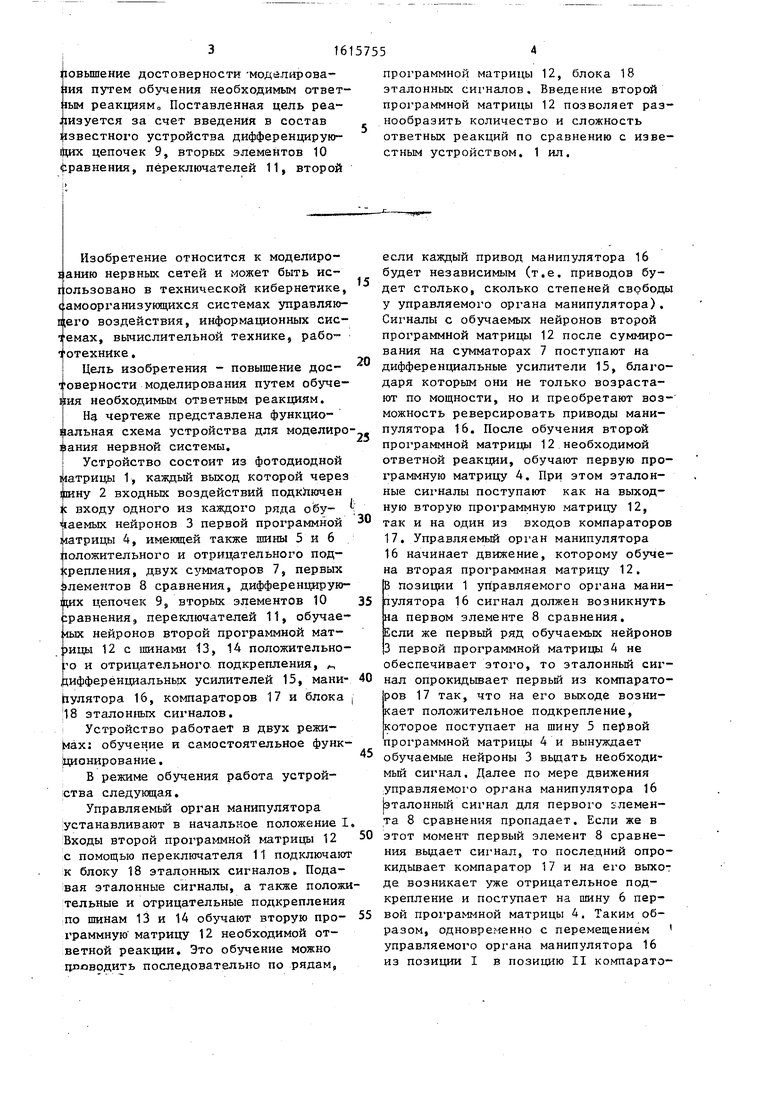
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования нервной системы | 1975 |
|
SU532110A1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| АДАПТИВНОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, НЕЙРОПОДОБНЫЙ БАЗОВЫЙ ЭЛЕМЕНТ И СПОСОБ ОРГАНИЗАЦИИ РАБОТЫ ТАКОГО УСТРОЙСТВА | 2011 |
|
RU2475843C1 |
| Устройство для моделирования условных рефлексов | 1975 |
|
SU612259A1 |
| Тренажер транспортного средства | 1985 |
|
SU1444863A1 |
| НЕПРЕРЫВНОЕ УПРАВЛЕНИЕ С ПОМОЩЬЮ ГЛУБОКОГО ОБУЧЕНИЯ С ПОДКРЕПЛЕНИЕМ | 2016 |
|
RU2686030C1 |
| СПОСОБ ДИАГНОСТИКИ ПАТОЛОГИИ ЗРИТЕЛЬНОГО НЕРВА | 2012 |
|
RU2496404C1 |
| ОБУЧАЕМАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2068575C1 |
| ТЕХНИЧЕСКАЯ НЕРВНАЯ СИСТЕМА | 1997 |
|
RU2128857C1 |
| Способ автоматического распознавания типа манипуляции радиосигналов | 2016 |
|
RU2622846C1 |
Изобретение относится к моделированию нервных сетей и может быть использовано в технической кибернетике, самоорганизующих системах управляющего воздействия, информационных системах, вычислительной технике, робототехнике. Цель изобретения - повышение достоверности моделирования путем обучения необходимым ответным реакциям. Поставленная цель реализуется за счет введения в состав известного устройства дифференцирующие цепочек 9, вторых элементов 10 сравнения, переключателей 11, второй программной матрицы 12, блока 18 эталонных сигналов. Введение второй программной матрицы 12 позволяет разнообразить количество и сложность ответных реакций по сравнению с известным устройством. 1 ил.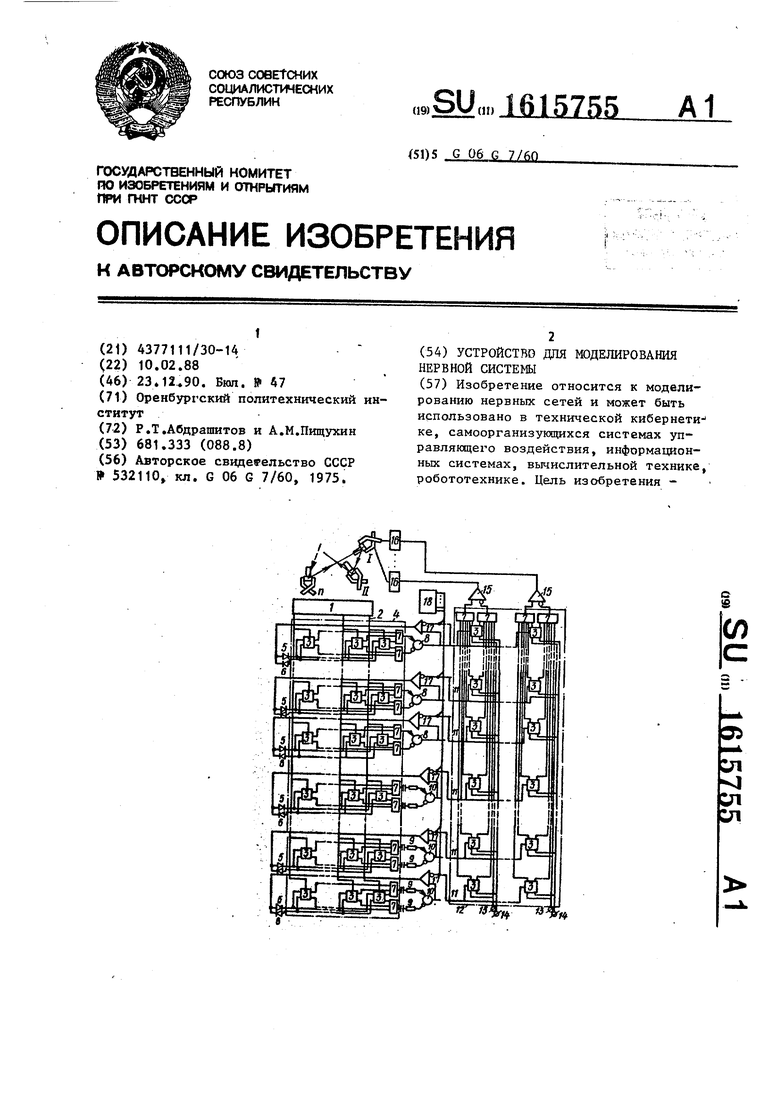
| Устройство для моделирования нервной системы | 1975 |
|
SU532110A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
