Изобретение относится к контрольно- измерительной технике в машиностроении, в частности к приборам для контроля кинематической погрешности зубчатых передач и редукторов.
Целью изобретения является расширение диапазона измерения.
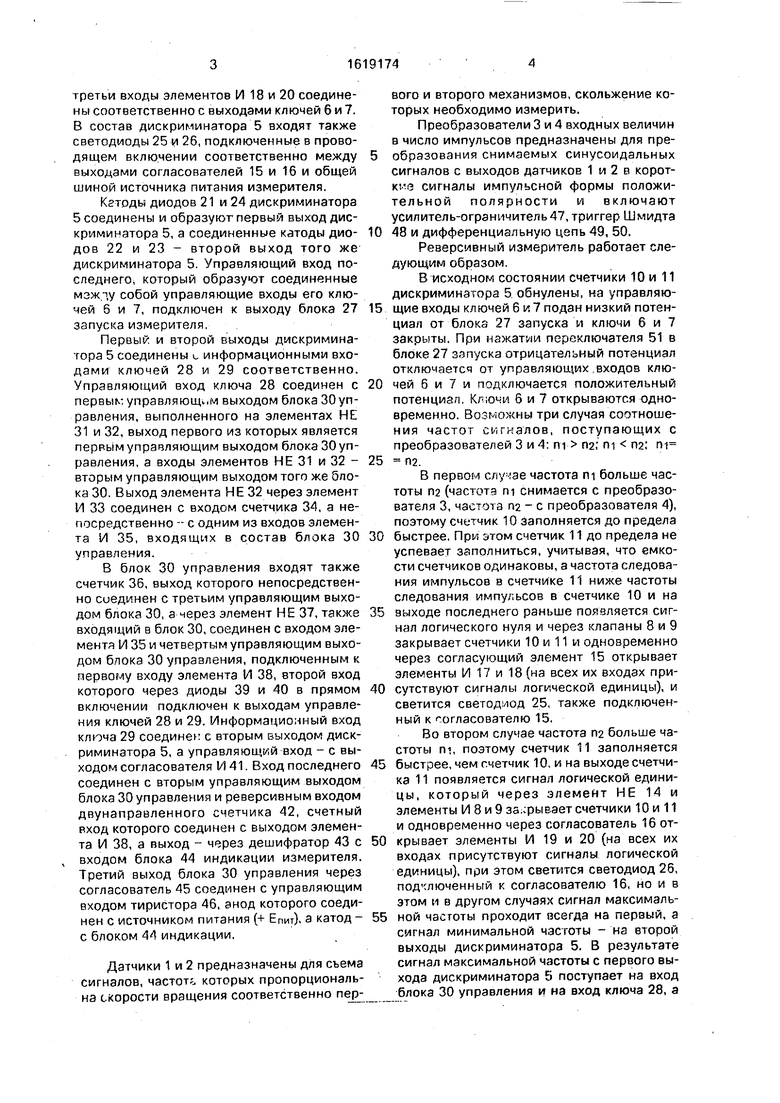
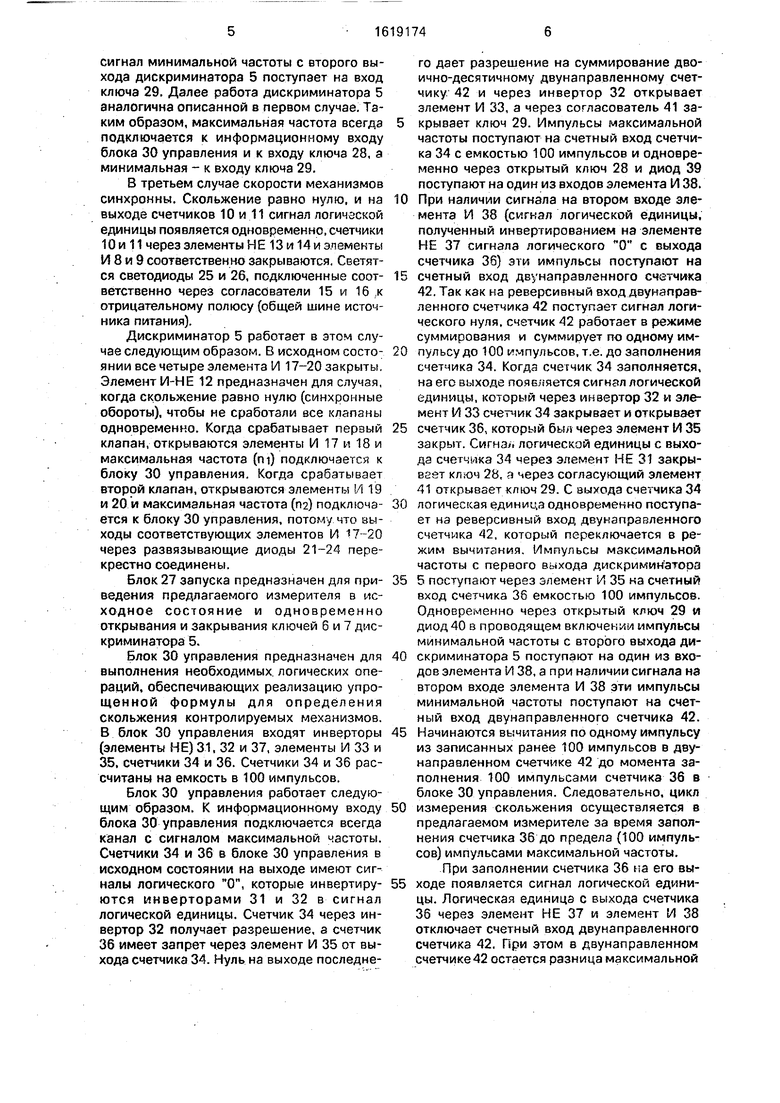
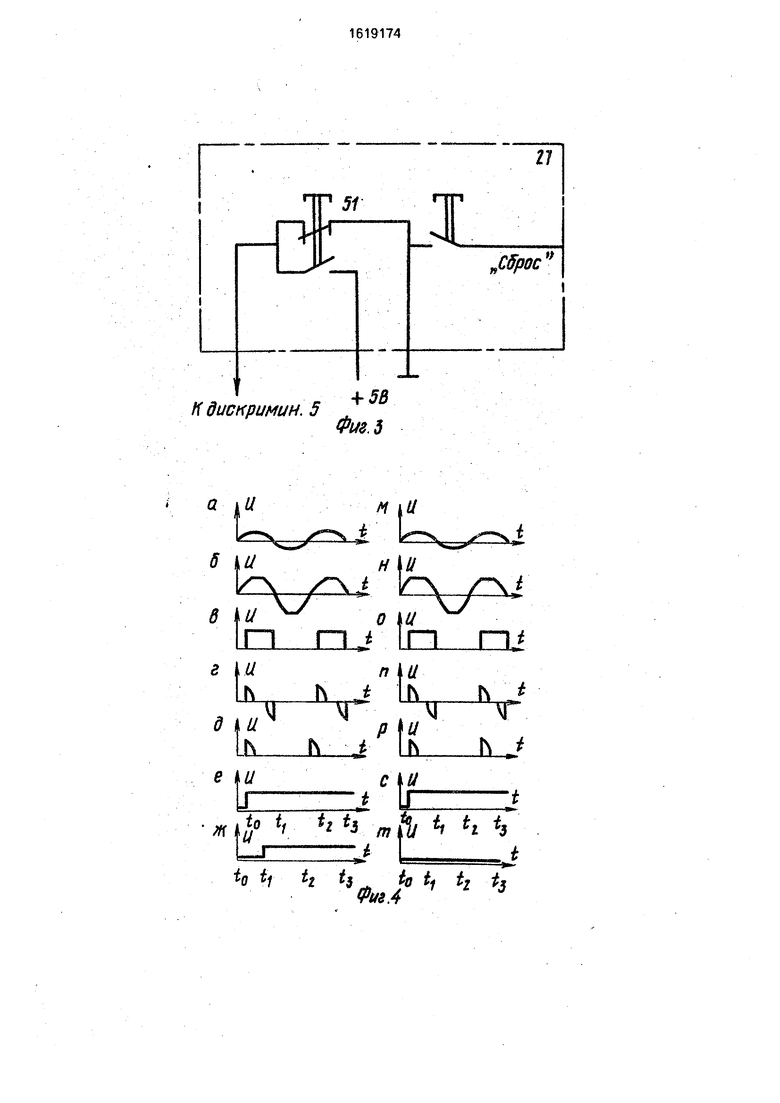
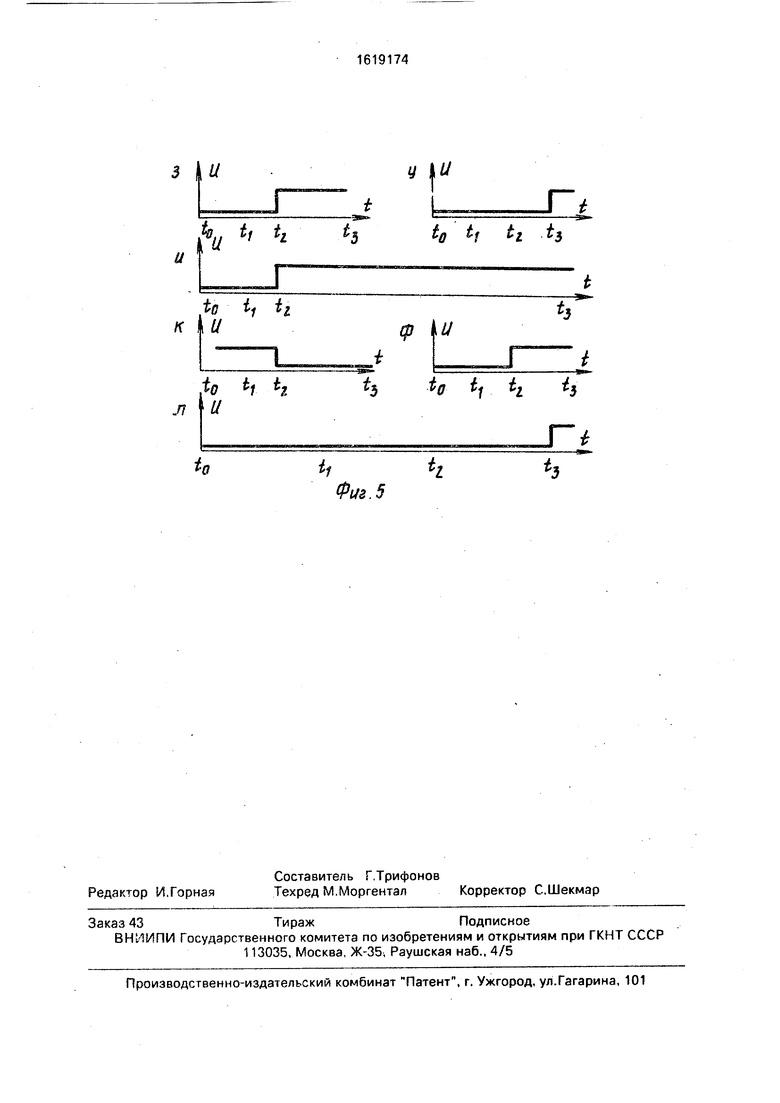
На фиг.1 представлена функциональная схема измерителя скольжения механических передач; на фиг.2 - функциональная схема преобразователя входа сигнала; на фиг.З - схема блока запуска; на фиг.4 и 5 - диаграммы напряжения на элементах измерителя.
Реверсивный измеритель содержит датчики 1 и 2, последовательно соединенные соответственно с преобразователями 3 и 4, выходы которых соединены соответственно с первым и вторым входами частотного дискриминатора 5 импульсных сигналов, выполненного по симметричной схеме сравнения, содержащей ключи 6 и 7, информационные входы которых являются соответственно первым и вторым информационными входами дискриминатора 5. Выходы ключей 6 и 7 соединены с входами элементов И 8 и 9 соответственно, выходы последних - с входами счетчиков 10 и 11, соединенных выходами с входами элементов И-НЕ 12 и НЕ 13 и 14 соответственно. Дискриминатор 5 содержит также согласо- ватели 15 и 16, входы которых соединены соответственно с выходами счетчиков 10 и 11, подключены к входам элемента И-НЕ 12. выход которого подключен к объединенным первым входам элементов И 17-20, соединенных выходами соответственно с анодами диодов 21-24, выход согласователя 15 соединен с вторыми входами элементов И 19 и 20, третьи входы элементов И 17 и 19 и
Оч
ю
S
третьи входы элементов И 18 и 20 соединены соответственно с выходами ключей 6 и 7. В состав дискриминатора 5 входят также светодиоды 25 и 26, подключенные в проводящем включении соответственно между выходами согласователей 15 и 16 и общей шиной источника питания измерителя.
Катоды диодов 21 и 24 дискриминатора 5 соединены и образуют первый выход дискриминатора 5, а соединенные катоды диодов 22 и 23 - второй выход того же дискриминатора 5. Управляющий вход последнего, который образуют соединенные собой управляющие входы его ключей 6 и 7, подключен к выходу блока 27 запуска измерителя.
Первый и второй выходы дискриминатора 5 соединены с информационными входами ключей 28 и 29 соответственно. Управляющий вход ключа 28 соединен с первые управляющем выходом блока 30 управления, выполненного на элементах НЕ 31 и 32, выход первого из которых является первым управляющим выходом блока 30 управления, а входы элементов НЕ 31 и 32 - вторым управляющим выходом того же блока 30. Выход элемента НЕ 32 через элемент И 33 соединен с входом счетчика 34, а непосредственно - с одним из входов элемента И 35, входящих в состав блока 30 управления.
В блок 30 управления входят также счетчик 36, выход которого непосредственно соединен с третьим управляющим выходом блока 30, а через элемент НЕ 37, также входящий в блок 30, соединен с входом элемента И 35 и четвертым управляющим выходом блока 30 управления, подключенным к первому входу элемента И 38, второй вход которого через диоды 39 и 40 в прямом включении подключен к выходам управления ключей 28 и 29. Информационный вход ключа 29 соединен с вторым выходом дискриминатора 5, а управляющий вход - с выходом согласователя И 41. Вход последнего соединен с вторым управляющим выходом блока 30 управления и реверсивным входом двунаправленного счетчика 42, счетный вход которого соединен с выходом элемента И 38, а выход - через дешифратор 43 с входом блока 44 индикации измерителя. Третий выход блока 30 управления через согласователь 45 соединен с управляющим входом тиристора 46, анод которого соединен с источником питания (+ Епит), а катод- с блоком 44 индикации.
Датчики 1 и 2 предназначены для съема сигналов, частота которых пропорциональна скорости вращения соответственно nej
вого и второго механизмов, скольжение которых необходимо измерить.
Преобразователи 3 и 4 входных величин в число импульсов предназначены для преобразования снимаемых синусоидальных сигналов с выходов датчиков 1 и 2 в короткие сигналы импульсной формы положительной полярности и включают усилитель-ограничитель47, триггер Шмидта
0 48 и дифференциальную цепь 49, 50.
Реверсивный измеритель работает следующим образом.
В исходном состоянии счетчики 10 и 11 дискриминатора 5 обнулены, на управляю5 щие входы ключей 6 и 7 подан низкий потенциал от блока 27 запуска и ключи 6 и 7 закрыты. При нажатии переключателя 51 в блоке 27 запуска отрицательный потенциал отключается от управляющих входов клю0 чей 6 и 7 и подключается положительный потенциал, Ключи 6 и 7 открываются одновременно. Возможны три случая соотношения частот сигналов, поступающих с преобразователей 3 и 4: щ па; гц па: гн
5 П2.
В первом ел у :ае частота щ больше частоты П2 (частота гц снимается с преобразователя 3, частота па - с преобразователя 4), поэтому счетчик 10 заполняется до предела
0 быстрее. При этом счетчик 11 до предела не успевает заполниться, учитывая, что емкости счетчиков одинаковы, а частота следования импульсов в счетчике 11 ниже частоты следования импульсов в счетчике 10 и на
5 выходе последнего раньше появляется сигнал логического нуля и через клапаны 8 и 9 закрывает счетчики 10 и 11 и одновременно через согласующий элемент 15 открывает элементы И 17 и 18 (на всех их входах при0 сутствуют сигналы логической единицы), и светится светод лод 25, также подключенный к гогласователю 15.
Во втором случае частота па больше частоты щ, поэтому счетчик 11 заполняется
5 быстрее, чем гчетчик 10, и на выходе счетчика 11 появляется сигнал логической единицы, который через элемент НЕ 14 и элементы И 8 и 9 закрывает счетчики 10 и 11 и одновременно через согласователь 16 от0 крывает элементы И 19 и 20 (на всех их входах присутствуют сигналы логической единицы), при этом светится светодиод 26, подключенный к согласователю 16, но и в этом и в другом случаях сигнал максималь5 ной частоты проходит зсегда на первый, а сигнал минимальной частоты - на второй выходы дискриминатора 5. В результате сигнал максимальной частоты с первого выхода дискриминатора 5 поступает на вход блока 30 управления и на вход ключа 28, а
сигнал минимальной частоты с второго выхода дискриминатора 5 поступает на вход ключа 29. Далее работа дискриминатора 5 аналогична описанной в первом случае. Таким образом, максимальная частота всегда подключается к информационному входу блока 30 управления и к входу ключа 28, а минимальная - к входу ключа 29.
В третьем случае скорости механизмов синхронны. Скольжение равно нулю, и на выходе счетчиков 10 и 11 сигнал логической единицы появляется одновременно, счетчики 10 и 11 через элементы НЕ 13 и 14 и элементы И 8 и 9 соответственно закрываются. Светятся светодиоды 25 и 26, подключенные соответственно через согласователи 15 и 16 к отрицательному полюсу (общей шине источника питания).
Дискриминатор 5 работает в этом случае следующим образом. В исходном состоянии все четыре элемента И 17-20 закрыты. Элемент И-НЕ 12 предназначен для случая, когда скольжение равно нулю (синхронные обороты), чтобы не сработали все клапаны одновременно. Когда срабатывает первый клапан, открываются элементы И 17 и 18 и максимальная частота (ni) подключается к блоку 30 управления. Когда срабатывает второй клапан, открываются элементы И 19 и 20 и максимальная частота (п2) подключается к блоку 30 управления, потому что выходы соответствующих элементов И 17-20 через развязывающие диоды 21-24 перекрестно соединены.
Блок 27 запуска предназначен для приведения предлагаемого измерителя в исходное состояние и одновременно открывания и закрывания ключей 6 и 7 дискриминатора 5.
Блок 30 управления предназначен для выполнения необходимых логических операций, обеспечивающих реализацию упрощенной формулы для определения скольжения контролируемых механизмов. В блок 30 управления входят инверторы (элементы НЕ) 31, 32 и 37, элементы И 33 и 35, счетчики 34 и 36. Счетчики 34 и 36 рассчитаны на емкость в 100 импульсов.
Блок 30 управления работает следующим образом. К информационному входу блока 30 управления подключается всегда канал с сигналом максимальной частоты. Счетчики 34 и 36 в блоке 30 управления в исходном состоянии на выходе имеют сигналы логического О, которые инвертируются инверторами 31 и 32 в сигнал логической единицы. Счетчик 34 через инвертор 32 получает разрешение, а счетчик 36 имеет запрет через элемент И 35 от выхода счетчика 34. Нуль на выходе последнего дает разрешение на суммирование двоично-десятичному двунаправленному счетчику 42 и через инвертор 32 открывает элемент И 33, а через согласователь 41 за- крывает ключ 29. Импульсы максимальной частоты поступают на счетный вход счетчика 34 с емкостью 100 импульсов и одновременно через открытый ключ 28 и диод 39 поступают на один из входов элемента И 38.
0 При наличии сигнала на втором входе элемента 1/1 38 (сигнал логической единицы, полученный инвертированием на элементе НЕ 37 сигнала логического О с выхода счетчика 36) эти импульсы поступают на
5 счетный вход двунаправленного счетчика 42. Так как на реверсивный вход двунаправленного счетчика 42 поступает сигнал логического нуля, счетчик 42 работает в режиме суммирования и суммирует по одному им0 пульсу до 100 импульсов, т.е. до заполнения счетчика 34. Когда счегчик 34 заполняется, на его выходе появляется сигнал логической единицы, который через инвертор 32 и элемент И 33 счетчик 34 закрывает и открывает
5 счетчик 36, который был через элемент И 35 закрыт. Сигнал логической единицы с выхода счетчика 34 через элемент НЕ 31 закрывает ключ 28, а через согласующий элемент 41 открывает ключ 29. С выхода счетчика 34
0 логическая единица одновременно поступает на реверсивный вход двунаправленного счетчика 42, который переключается в режим вычитания. Импульсы максимальной частоты с первого выхода дискримикатооа
5 5 поступают через элемент И 35 на счетный вход счетчика 36 емкостью 100 импульсов. Одновременно через открытый ключ 29 и диод 40 в проводящем включена импульсы минимальной частоты с второго выхода ди0 скриминатора 5 поступают на один из входов элемента И 38, а при наличии сигнала на втором входе элемента И 38 эти импульсы минимальной частоты поступают на счетный вход двунаправленного счетчика 42.
5 Начинаются вь читания по одному импульсу из записанных ранее 100 импульсов в двунаправленном счетчике 42 до момента заполнения 100 импульсами счетчика 36 в блоке 30 управления. Следовательно, цикл
0 измерения скольжения осуществляется в предлагаемом измерителе за время заполнения счетчика 36 до предела (100 импульсов) импульсами максимальной частоты. При заполнении счетчика 36 на его вы5 ходе появляется сигнал логической единицы. Логическая единица с выхода счетчика 36 через элемент НЕ 37 и элемент И 38 отключает счетный вход двунаправленного счетчика 42. При этом в двунаправленном счетчике42 остается разница максимальной
и минимальной частоты скольжения в двоично-десятичном коде. Цикл измерения закончен.
Таким образом, в реверсивном измерителе реализуется формула скольжения
S(100-n2)%.
Для ее получения примем частоту вращения ведущего механизма (механизма с максимальной частотой вращения) равной 100 об,/ед., а частоту вращения ведомого механизма (механизма с меньшей, минимальной частотой вращения) - П2 об. в тот же промежуток времени. Тогда формула для определения скольжения принимает вид
s -100% . юо%
100
(100-n2)%.
Подобное упрощение формулы позволяет использовать в предлагаемом измерителе в качестве запоминающих элементов счетчики, а сложную для реализации операцию деления заменить на простую операцию вычитания.
Формула изобретения
Реверсивный измеритель скольжения механических передач, содержащий в каждом канале датчик, соединенный с преобра- зователем частоты вращения в пропорциональное количество импульсов, и счетчик, блок запуска, отличающийся тем, что, с целью расширения диапазона измерений, в измеритель введены тринадцать схем И, пять схем НЕ, одна схема И-НЕ, четыре согласователя, шесть диодов, два све- тодиода, два счетчика, реверсивный счетчик, дешифратор, блок индикации и тиристор, при этом выход первого преобразователя соединен с первым входом первой схемы И, а выход второго преобразователя соединен с первым входом второй схемы И, вторые входы первой и второй схем И соединены с выходом блока запуска, выход третьей схемы И соединен с входом первого счетчика, а выход четвертой схемы И соединен с входом второго счетчика, выход первой схемы И соединен с вторыми входами третьей, пятой и шестой схем И, а выход второй схемы И соединен с вторыми входами четвертой, седьмой и восьмой схем И, выход первого счетчика соединен с входами первого согласователя, первым входом схемы И-НЕ и первой схемой НЕ, выход которой соединен с аторыми входами третьей и четвертой схем И, а выход второго счетчика соединен с входами второго согласователя, вторым
входом схемы И-НЕ и второй схемой НЕ, выход которой соединен с третьими входами третьей и четвертой схем И, выход первого согласователя соединен с входом первого светодиода, выход которого заземлен, и вторыми входами пятой и седьмой схем И, а выход второго согласователя соединен с входом второго светодиода, выход которого заземлен, и вторыми входами шестой и восьмой схем И, выход схемы И-НЕ
соединен с третьими входами пятой, шестой, седьмой и восьмой схем И, выходы пятой и восьмой схем И объединены через диоды и соединены с первыми входами девятой, десятой и одиннадцатой схем И, а
выходы шестой и седьмой схем И через диоды объединены и соединены с первым входом двенадцатой схемы И, выходы девятой и двенадцатой схем И через третий и четвертый диоды в прямом направлении соединены с первым входом тринадцатой схемы И, выход десятой схемы И соединен с входом третьего счетчика, а выход одиннадцатой схемы И соединен с входом четвертого счетчика, при этом выход третьего счетчика соединен с входами третьей и четвертой схем НЕ, входом третьего согласователя, входом реверсивного счетчика и вторым входом одиннадцатой схемы И, а выход четвертого счетчика соединен с входами четвертого согласователя и пятой схемой НЕ, выход которой соединен с вторыми входами одиннадцатой схемы И и тринадцатой схемы И, выход которой соединен со счетным входом реверсивного счетчика, выход
третьей схемы НЕ соединен с вторым входом девятой схемы И, а выход третьего согласователя соединен с вторым входом двенадцатой схемы И, выход реверсивного счетчика через дешифратор соединен с блоком индикации, напряжение на который подается от источника питания через тиристор, управляющий вход которого соединен с выходом четвертого соглгсователя.
25
LJ 21
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССИВНЫЙ КВАНТОВЫЙ СТАНДАРТ ЧАСТОТЫ | 1984 |
|
SU1241959A1 |
| Стабилизатор напряжения | 1987 |
|
SU1621012A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
| Устройство для определения положения экскавационной машины в пространстве | 1980 |
|
SU937622A1 |
| Устройство для измерения функции распределения случайных сигналов | 1976 |
|
SU656046A2 |
| Устройство для управления скоростью вращения электродвигателя постоянного тока | 1985 |
|
SU1564590A1 |
| Цифровой частотный дискриминатор | 1978 |
|
SU790235A1 |
| УЛЬТРАКОРОТКОВОЛНОВАЯ РАДИОСТАНЦИЯ | 2015 |
|
RU2594180C1 |
| Устройство для программного регулирования температуры | 1987 |
|
SU1541572A1 |
| Цифровой измеритель параметров комплексного сопротивления | 1989 |
|
SU1732292A1 |
Изобретение относится к контрольно- измерительной технике, в частности к приборам для контроля кинематической погрешности зубчатых передач и редукторов. Цель изобретения - расширение диапазона измерения. Реверсивный измеритель скольжения состоит из двух датчиков, соединенных с двумя преобразователями входного сигнала в число импульсов, пропорциональное частоте вращения, частотного дискриминатора, блока управления, реверсивного счетчика со схемой управления и блока индикации. Работа реверсивного измерителя заключается в определении минимальной частоты вращения П2 с помощью частичного дискриминатора и подсчете скольжения S на реверсивном счетчике по формуле S (100 - п)%, при этом на первом этапе измерения в реверсивный счетчик в режиме сложения заносятся 100 импульсов, на втором этапе в режиме вычитания производится подсчет скольжения по указанной формуле. 5 ил. iv fe
Фиг.1
41
Отпреобраз 1К диснриминам. 5
Фиг.I
48
49
±
50
Ч Ч i of f i / 0}
л ллй74
/7 g
/ о
C &ty dff +
g -нпнпйизпдц
KtJ
W16191
a iu
Фиг. 5
У iU
| Авторское свидетельство СССР № 902403, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
