1
Изобретение относится к автоматическому измерению параметров работы экскавационных машин, а именно экскаваторадраглайна, и, в частности, предназначено для автоматического определения аппликаты точки состояния экскаватора при его передвижке в процессе экскавации.
Известны различные устройства для определения основных параметров работы экскаватора 1 и 2.
Известно устройство для определения положения экскавационной машины в пространстве, а именно карьерного экскаватора, содержащее датчик пути перемещения, датчик угла наклона, связанный с ними выходной блдк, вычислитель, блок задания опорной плоскости, блок определения совмещения контролируемой точки, которые связаны между собой 3.
Однако указанное устройство весьма сложно по структуре, поскольку в нем предусматривается задание линии перемещения экскаватора в пространстве и ее отработка следящей системой, выходные сигналы которой воздействуют на приводы экскаватора. Кроме того, такое решение устройства способствует накоплению случайной составляющей ошибки измерения контролируемого параметра, поскольку сигналы датчиков пути и угла наклона непрерывно- обрабатываются в измерительных трактах устройства как при движении экскаватора, так и при его стоянии на месте. Таким образом, использование такого устройства для измерения положения экскаватора-драглайна в пространстве относительно редко перемещающегося в процессе экскавации не эффективно.
Цель изобретения - повышение точности измерения аппликаты точки состояния экскаватора.
Поставленная цель достигается тем, что устройство снабжено датчиками верхнего
15 положения опор, рабочего и нерабочего положения кронштейна, шарнирно закрепленного на поворотной платформе экскаватора, узлом реверсивного управления и вторым датчиком угла наклона, причем датчик
2Q пути расположен на кронщтейне и снабжен приводом, расположенным на поворотной платформе, при этом привод и датчики пути, верхнего положения опор, рабочего и нерабочего положения кронштейна подключены к узлу реверсивного управления, а
датчики угла наклона экскаватора выполнены на поворотных трансформаторах, параллельно синусным обмоткам которых подключены выпрямители на кипп-реле, роторы трансформаторов имеют ограничители поворота и на их осях жестко закреплены грузы, а статоры закреплены на поворотной платформе экскаватора, при этом их продольные оси расположены параллельно плоскости платформы и перпендикулярно к вертикальной плоскости, проведенной через ось стрелы прн ее нахождении в транспортном положении экскаватора.
Прн этом вычислитель выполнен в виде четырех ключей, двух интеграторов, двух компараторов, трех логических элементов И, двух триггеров, генератора импульсов и счетчика импульсов, причем первый ключ через последовательно соединенные первый интегратор и первый компаратор подключен к одному из входов первого триггера, второй вход которого соединен параллельно с одним из входов второго триггера, соответствующие выходы первого триггера соединены с входами второго и третьего ключей и первого логического элемента И, к второму входу которого подключен выход второго триггера, второй вход которого соединен с выходом второго компаратора, к входу которого через последовательно соединенные четвертый ключ и второй интегратор подключен выход первого логического элемента И, выход третьего ключа подключен к второму эходу первого интегратора, выход второго ключа подключен к второму входу второго интегратора, а выход четвертого ключа подключен к запрещающему входу счетчика, к счетным входам которого подключены выходы второго и третьего логических элементов И, одни входы которых соединены параллельно и подключены к генератору импульсов, а вторые входы второго и третьего логических элементов И, входы второго ключа, вход первого ключа и параллельные входы триггеров являются входами вычислителя, а выходы счетчика являются выходами вычислителя.
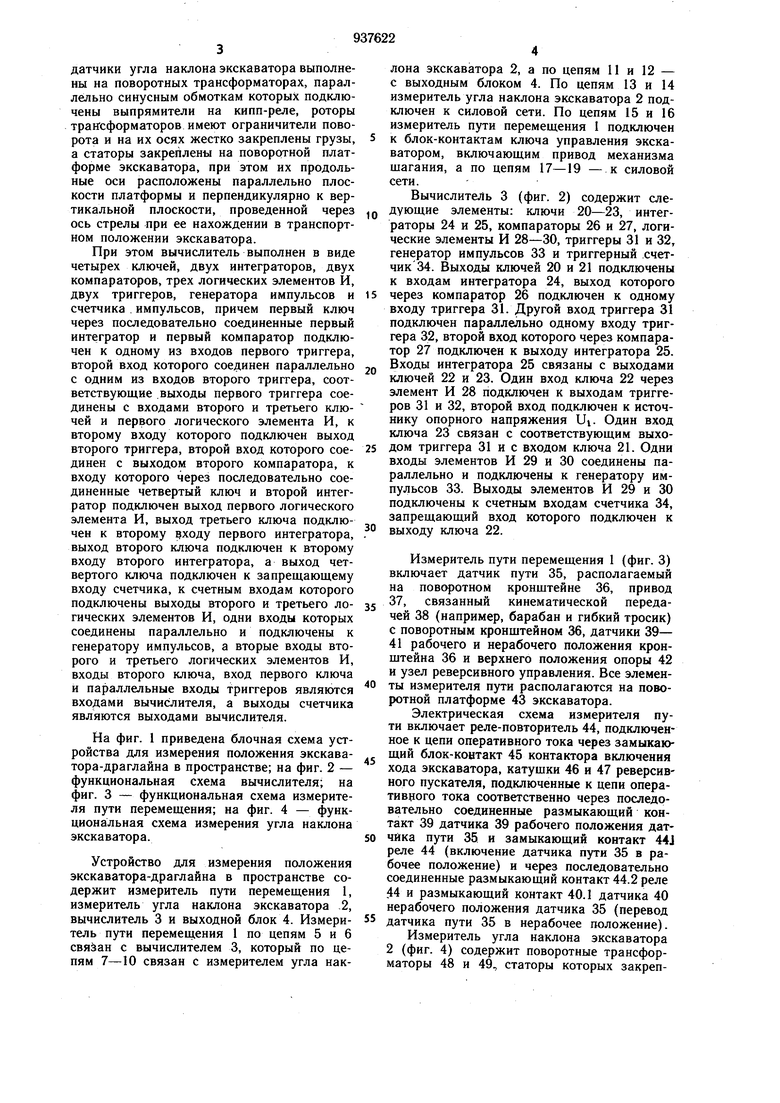
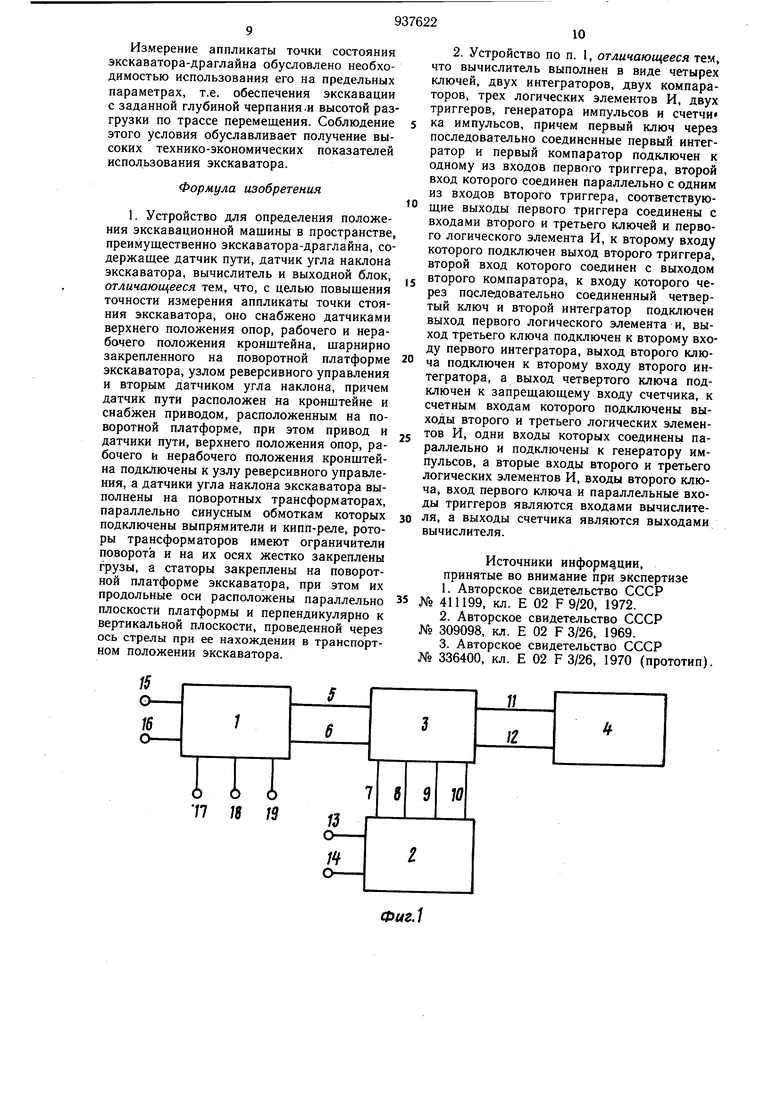
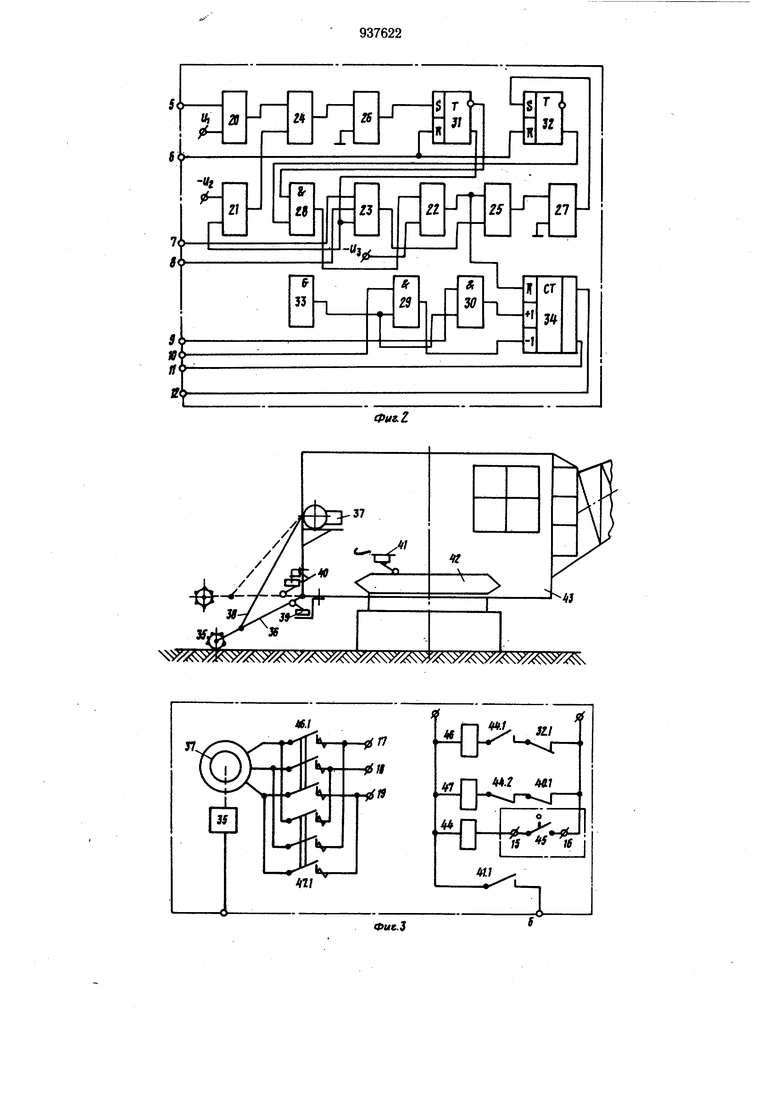
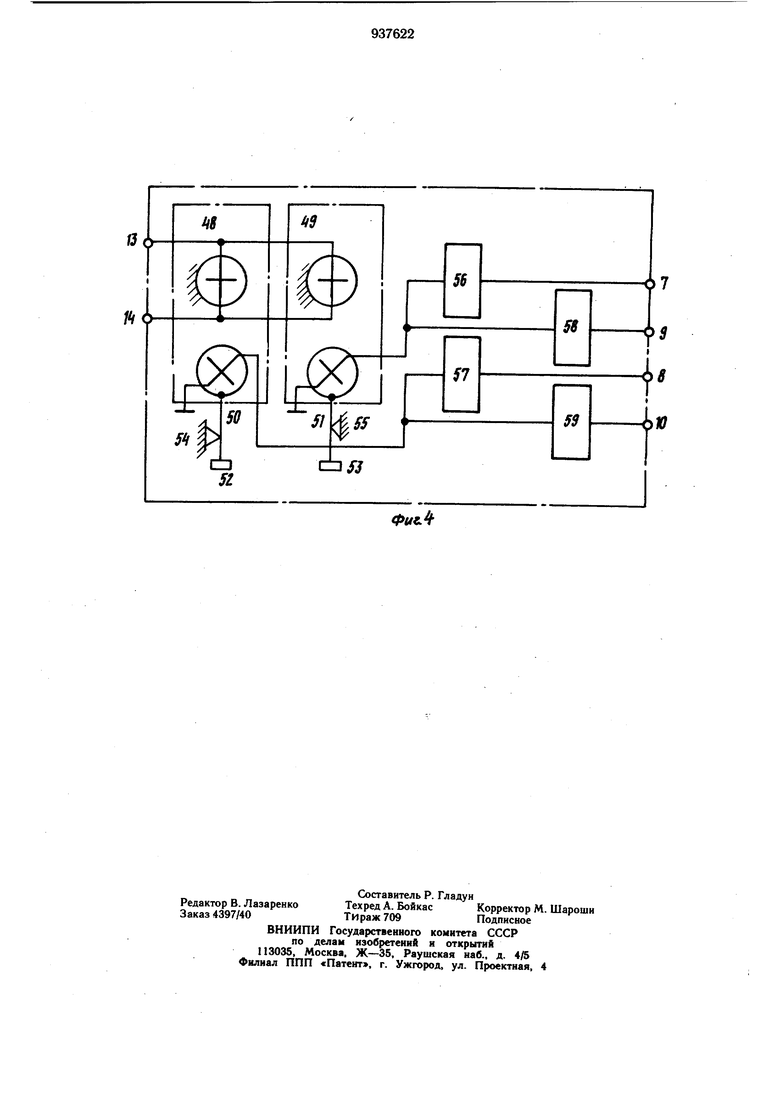
На фиг. 1 приведена блочная схема устройства для измерения положения экскаватора-драглайна в пространстве; на фиг. 2 - функциональная схема вычислителя; на фиг. 3 - функциональная схема измерителя пути перемещения; на фиг. 4 - функциональная схема измерения угла наклона экскаватора.
Устройство для измерения положения экскаватора-драглайна в пространстве содержит измеритель пути перемещения 1, измеритель угла наклона экскаватора 2, вычислитель 3 и выходной блок 4. Измеритель пути перемещения 1 по цепям 5 и 6 связан с вычислителем 3, который по цепям 7-10 связан с измерителем угла наклоиа экскаватора 2, а по цепям 11 и 12 - с выходным блоком 4. По цепям 13 и 14 измеритель угла наклона экскаватора 2 подключен к силовой сети. По цепям 15 и 16 измеритель пути перемещения 1 подключен
к блок-контактам ключа управления экскаватором, включающим привод механизма щагания, а по цепям 17-19 - к силовой сети.
Вычислитель 3 (фиг. 2) содержит следующие элементы: ключи 20-23, интеграторы 24 и 25, компараторы 26 и 27, логические элементы И 28-30, триггеры 31 и 32, генератор импульсов 33 и триггерный счетчик 34. Выходы ключей 20 и 21 подключены к входам интегратора 24, выход которого
через компаратор 26 подключен к одному входу триггера 31. Другой вход триггера 31 подключен параллельно одному входу триггера 32, второй вход которого через компаратор 27 подключен к выходу интегратора 25. Входы нитегратора 25 связаны с выходами ключей 22 и 23. Один вход ключа 22 через элемент И 28 подключен к выходам триггеров 31 и 32, второй вход подключен к источнику опорного напряжения Ui. Один вход ключа 23 связан с соответствующим выходом триггера 31 и с входом ключа 21. Одни входы элементов И 29 и 30 соединены параллельно н подключены к генератору импульсов 33. Выходы элементов И 29 и 30 подключены к счетным входам счетчика 34, запрещающий вход которого подключен к
выходу ключа 22.
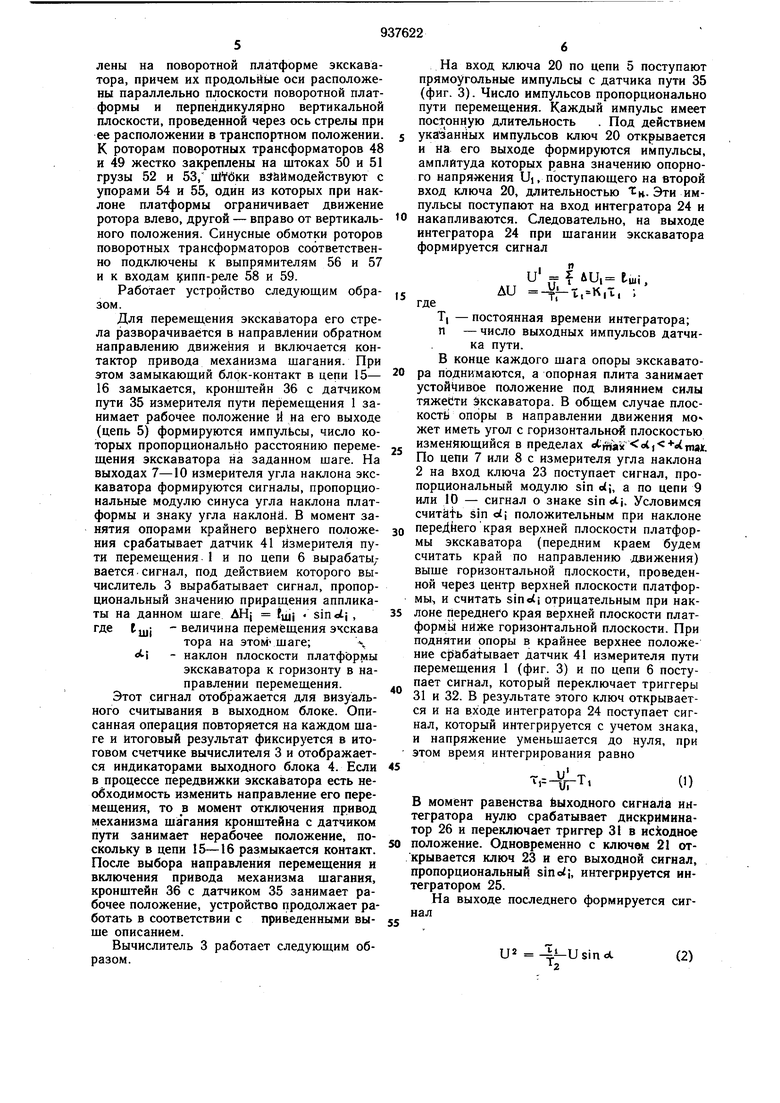
Измеритель пути перемещения 1 (фиг. 3) включает датчик пути 35, располагаемый на повсфотном кронщтейне 36, привод 37, связанный кинематической передачей 38 (например, барабан н гибкий тросик) с поворотным кронщтейиом 36, датчики 39- 41 рабочего и нерабочего положения кронщтейна 36 и верхнего положения опоры 42 и узел реверсивного управления. Все элементы измерителя пути располагаются на поворотной платформе 43 экскаватора.
Электрическая схема измерителя пути включает реле-повторитель 44, подключенное к цепи оперативного тока через замыкающий блок-контакт 45 контактора включения хода экскаватора, катущки 46 и 47 реверсивного пускателя, подключенные к цепи оперативрого тока соответственно через последовательно соединенные размыкающий контакт 39 датчика 39 рабочего положения дат0 чйка пути 35 и замыкающий контакт 44J реле 44 (включение датчика пути 35 в рабочее положение) и через последовательно соединенные размыкающий контакт 44.2 реле 44 и размыкающий контакт 40.1 датчика 40 нерабочего положения датчика 35 (перевод
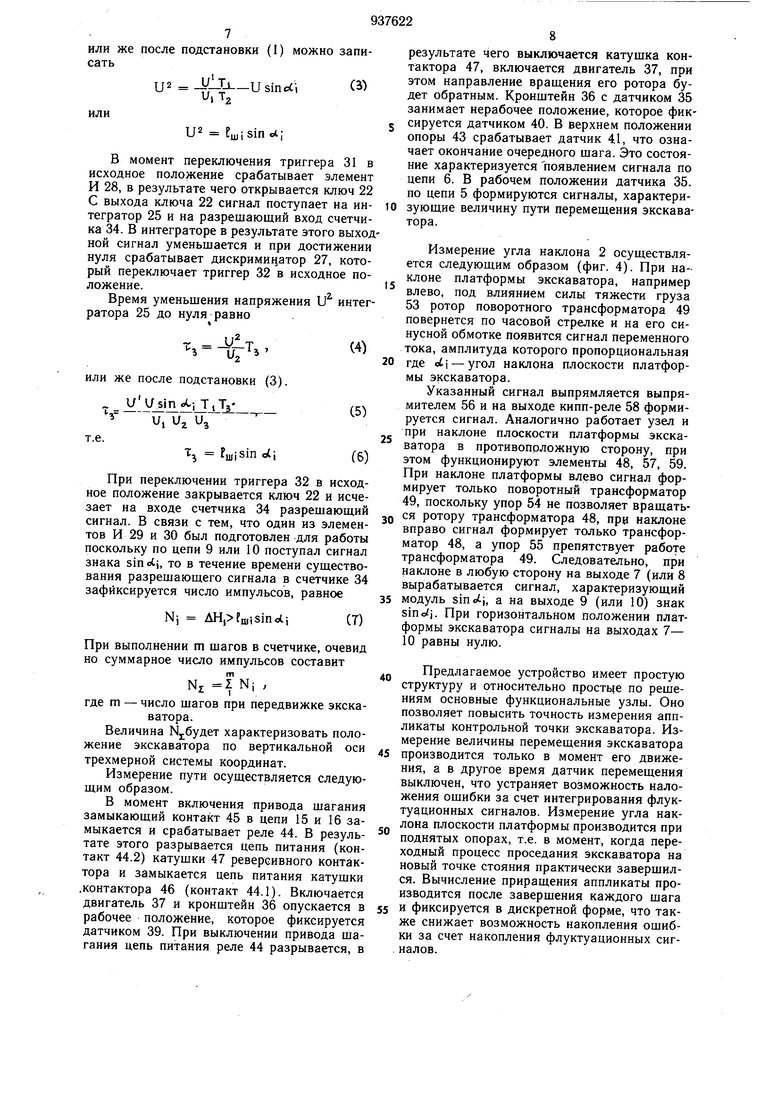
5 датчика пути 35 в нерабочее положение). Измеритель угла наклона экскаватора 2 (фиг. 4) содержит поворотные трансформаторы 48 и 49., статоры которых закреплены на поворотной платформе экскаватора, причем их продольйые оси расположены параллельно плоскости поворотной платформы и перпендикулярно вертикальной плоскости, проведенной через ось стрелы при ее расположении в транспортном положении. К роторам поворотных трансформаторов 48 и 49 жестко закреплены на штоках 50 и 51 грузы 52 и 53, uitdKK взаимодействуют с упорами 54 и 55, один из которых при наклоне платформы ограничивает движение ротора влево, другой - вправо от вертикального положения. Синусные обмотки роторов поворотных трансформаторов соответственно подключены к выпрямителям 56 и 57 и к входам 1 ипп-реле 58 и 59.
Работает устройство следующим образом.
Для перемещения экскаватора его стрела разворачивается в направлении обратном направлению движейия и включается контактор привода механизма шагания. При этом замыкающий блок-контакт в цепи 15- 16 замыкается, кронщтейн 36 с датчиком пути 35 измерителя пути перемещения 1 занимает рабочее положение И на его выходе (цепь 5) формируются импулЬсы, число которых пропорционально расстоянию перемещения экскаватора на заданном шаге. На выходах 7-10 измерителя угла наклона экскаватора формируются сигналы, пропорциональные модулю синуса угла наклона платформы и знаку угла наклойй. В момент занятия опорами крайнего верхнего положения срабатывает датчик 41 измерителя пути перемещения 1 и по цепи 6 вырабаты/ вается.сигнал, под действием которого вычислитель 3 вырабатывает сигнал, пропорциональный значению приращения аппликаты на данном шаге AHj fujj sinotj , где tjyj - величина перемещения эчскава
тора на этол1 шаге;
i - наклон плоскости платформы экскаватора к горизонту в направлении перемещения. Этот сигнал отображается для визуального считывания в выходном блоке. Описанная операция повторяется на каждом щаге и Итоговый результат фиксируется в итоговом счетчике вычислителя 3 и отображается индикаторами выходного блока 4. Если в процессе передвижки экскаватора есть необходимость изменить направление его перемещения, то в момент отключения привод механизма щагания кронштейна с датчиком пути занимает нерабочее положение, поскольку в цепи 15-16 размыкается контакт. После выбора направления перемещения н включения привода механизма шагания, кронщтейн 36 с датчиком 35 занимает рабочее положение, устройство продолжает работать в соответствии с приведенными выше описанием.
Вычислитель 3 работает следующим образом.
На вход ключа 20 по цепи 5 поступают прямоугольные импульсы с датчика пути 35 (фиг. 3). Число импульсов пропорционально пути перемещения. Каждый импульс имеет постонную длительность . Под действием
указанных импульсов ключ 20 открывается и на его выходе формируются импульсы, амплитуда которых равна значению опорного напряжения Uj, поступающего на второй вход ключа 20, длительностью tn. Эти импульсы поступают на вход интегратора 24 и
накапливаются. Следовательно, на выходе интегратора 24 при шагании экскаватора формируется сигнал
и 1 Ли, 1ш,-.
ли цг;-г,к,1, ;
где
Т, - постоянная времени интегратора; п - число выходных импульсов датчика пути. В конце каждого шага опоры экскаватора поднимаются, а опорная плита занимает устойчивое положение под влиянием силы тяжести Экскаватора. В общем случае плоскости опоры в направлении движения мо жет иметь угол с горизонтальной плоскостью изменяющийся в пределах . По цепи 7 или 8 с измерителя угла наклона 2 на вход ключа 23 поступает сигнал, пропорциональный модулю sin d, а по цепи 9 или 10 - сигнал о знаке sinetj. Условимся считйфь sin oij положительным при наклоне
0 переднего края верхней плоскости платформы экскаватора (передним краем будем считать край по направлению движения) выще горизонтальной плоскости, проведенной через центр верхней плоскости платформы, и считать отрицательным при наклоне переднего края верхней плоскости платформй ниже горизонтальной плоскости. При поднятии опоры в крайнее верхнее положение срабаФывает датчик 41 измерителя пути перемещения 1 (фиг. 3) и по цепи 6 поступает сигнал, который переключает триггеры 31 и 32. В результате этого ключ открывается и на входе интегратора 24 поступает сигнал, который интегрируется с учетом знака, и напряжение уменьшается до нуля, при этом время интегрирования равно
и -г
(1)
в момент равенства выходного сигнала интегратора нулю срабатывает дискриминатор 26 и переключает триггер 31 в исходное положение. Одновременно с ключом 21 открывается ключ 23 и его выходной сигнал, пропорциональный , интегрируется интегратором 25.
На выходе последнего формнруется сигнал
U2 ч.-UsinoC
(2) или же после подстановки (I) можно записатьи 2 sincC)СЗ) U2 .л; В момент переключения триггера 31 в исходное положение срабатывает элемент И 28, в результате чего открывается ключ 22 С выхода ключа 22 сигнал поступает на интегратор 25 и на разрешающий вход счетчика 34. В интеграторе в результате этого выход ной сигнал уменьшается и при достижении нуля срабатывает дискриминатор 27, который переключает триггер 32 в исходное положение. Время уменьшения напряжения U интегратора 25 до нуля равно i или же после подстановки (3). f и, и, Ц Т PiujSin При переключении триггера 32 в исходное положение закрывается ключ 22 и исчезает на входе счетчика 34 разрешающий сигнал. В связи с тем, что один из элементов И 29 и 30 был подготовлен для работы поскольку по цепи 9 или 10 поступал сигнал знака sin otj, то в течение времени сушествования разрешающего сигнала в счетчике 34 зафиксируется число импульсов, равное Nj AH,fmiSinoli При выполнении m шагов в счетчике, очевид но суммарное число импульсов составит , где m - число шагов при передвижке экскаватора. Величина Ыл-будет характеризовать положение экскаватора по вертикальной оси трехмерной системы координат. Измерение пути осуществляется следующим образом. В момент включения привода шагания замыкающий контакт 45 в цепи 15 и 16 замыкается и срабатывает реле 44. В результате этого разрывается цепь питания (контакт 44.2) катушки 47 реверсивного контактора и замыкается цепь питания катушки .контактора 46 (контакт 44.1). Включается двигатель 37 и кронштейн 36 опускается в рабочее положение, которое фиксируется датчиком 39. При выключении привода щагания цепь питания реле 44 разрывается, в результате чего выключается катущка контактора 47, включается двигатель 37, при этом направление вращения его ротора будет обратным. Кронштейн 36 с датчиком 35 занимает нерабочее положение, которое фиксируется датчиком 40. В верхнем положении опоры 43 срабатывает датчик 41, что означает окончание очередного шага. Это состояние характеризуется появлением сигнала по цепи 6. В рабочем положении датчика 35. по цепи 5 формируются сигналы, характеризующие величину пути перемещения экскаватора. Измерение угла наклона 2 осуществляется следующим образом (фиг. 4). При наклоне платформы экскаватора, например влево, под влиянием силы тяжести груза 53 ротор поворотного трансформатора 49 повернется по часовой стрелке и на его синусной обмотке появится сигнал переменного тока, амплитуда которого пропорциональная где oij - угол наклона плоскости платформы экскаватора. Указанный сигнал выпрямляется выпрямителем 56 и на выходе кипп-реле 58 формируется сигнал. Аналогично работает узел и при наклоне плоскости платформы экскаватора в противоположную сторону, при этом функционируют элементы 48, 57, 59. При наклоне платформы влево сигнал формирует только поворотный трансформатор 49, поскольку упор 54 не позволяет вращаться ротору трансформатора 48, при наклоне вправо сигнал формирует только трансформатор 48, а упор 55 препятствует работе трансформатора 49. Следовательно, при наклоне в любую сторону на выходе 7 (или 8 вырабатывается сигнал, характеризующий модуль .i, а на выходе 9 (или 10) знак sinoij. При горизонтальном положении платформы экскаватора сигналы на выходах 7- 10 равны нулю. Предлагаемое устройство имеет простую структуру и относительно простце по решениям основные функциональные узлы. Оно позволяет повысить точность измерения аппликаты контрольной точки экскаватора. Измерение величины перемещения экскаватора производится только в момент его движения, а в другое время датчик перемещения выключен, что устраняет возможность наложения ощибки за счет интегрирования флуктудционных сигналов. Измерение угла наклона плоскости платформы производится при поднятых опорах, т.е. в момент, когда переходный процесс проседания экскаватора на новый точке стояния практически завершился. Вычисление приращения аппликаты производится после заверщения каждого щага и фиксируется в дискретной форме, что также снижает возможность накопления ощибки за счет накопления флуктуационных сигналов. Измерение аппликаты точки состояния экскаватора-драглайна обусловлено необходимостью использования его на предельных параметрах, т.е. обеспечения экскавации с заданной глубиной черпания /и высотой разгрузки по трассе перемещения. Соблюдение этого условия обуславливает получение высоких технико-экономических показателей использования экскаватора. Формула изобретения 1. Устройство для определения положения экскавационной машины в пространстве, преимущественно экскаватора-драглайна, содержащее датчик пути, датчик угла наклона экскаватора, вычислитель и выходной блок, отличающееся тем, что, с целью повышения точности измерения аппликаты точки стояния экскаватора, оно снабжено датчиками верхнего положения опор, рабочего и нерабочего положения кронштейна, шарнирно закрепленного на поворотной платформе экскаватора, узлом реверсивного управления и вторым датчиком угла наклона, причем датчик пути расположен на кронштейне и снабжен приводом, расположенным на поворотной платформе, при этом привод и датчики пути, верхнего положения опор, рабочего и нерабочего положения кронштейна подключены к узлу реверсивного управления, а датчики угла наклона экскаватора выполнены на поворотных трансформаторах, параллельно синусным обмоткам которых подключены выпрямители и кипп-реле, роторы трансформаторов имеют ограничители поворота и на их осях жестко закреплены грузы, а статоры закреплены на поворотной платформе экскаватора, при этом их продольные оси расположены параллельно плоскости платформы и перпендикулярно к вертикальной плоскости, проведенной через ось стрелы при ее нахождении в транспортном положении экскаватора. 2. Устройство по п. 1, отличающееся т&ы, что вычислитель выполнен в виде четырех ключей, двух интеграторов, двух компараторов, трех логических элементов И, двух триггеров, генератора импульсов и счетчи ка импульсов, причем первый ключ через последовательно соединенные первый интегратор и первый компаратор подключен к одному из входов первого триггера, второй вход которого соединен параллельно с одним из входов второго триггера, соответствующие выходы первого триггера соединены с входами второго и третьего ключей и первого логического элемента И, к второму входу которого подключен выход второго триггера, второй вход которого соединен с выходом второго компаратора, к входу которого через последовательно соединенный четвертый ключ и второй интегратор подключен выход первого логического элемента и, выход третьего ключа подключен к второму входу первого интегратора, выход второго клюцд подключен к второму входу второго интегратора, а выход четвертого ключа подключен к запрещающему входу счетчика, к счетным входам которого подключены выходы второго и третьего логических элементов И, одни входы которых соединены параллельно и подключены к генератору импульсов, а вторые входы второго и третьего логических элементов И, входы второго ключа, вход первого ключа и параллельные входы триггеров являются входами вычислителя, а выходы счетчика являются выходами вычислителя. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 411199, кл. Е 02 F 9/20, 1972. 2. Авторское свидетельство СССР № 309098, кл. Е 02 F 3/26, 1969. 3. Авторское свидетельство СССР № 336400, кл. Е 02 F 3/26, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения положения экска-BATOPA-дРАглАйНА B пРОСТРАНСТВЕ | 1979 |
|
SU800294A1 |
| Устройство для определения угла откоса предотвала | 1980 |
|
SU939656A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО | 1972 |
|
SU351982A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
Фиг.1
