ча, элемент ИЛИ, элемент ИЛИ-НЕ и формирователь короткого импульса, выход которого является первым выходом блока, а вход подключен к выходу эле- мента ИЛИ, выходы первЪго и,второго делителей импульсов соединены с первыми входами соответственно первого и второго формирователей импульс - импульс, вторые входы которых соедине- ны с первым и вторым входами распределителя импульсов соответственно, вход которого покдшочен к входу первого делителя импульсов, выход первого формирователя импульс-импульс соединен с R-входом КЗ-триггера и первым входом элемента ИЛИ, выход второго формирователя импульс-импульс соединен с S-входом КЗ-триггера и с вторым входом элемента ИЛИ, третий вход которого соединен с выходом элемента ИЛИ НЕ, первый и второй ЕХО- ды которого подключены к выходам первого и второго ключей соответственно, первые входы которых являются третьим и четвертым входами блока соответственно, прямой выход триггера соединен с вторым входом перв,ого ключа, а инверсный выход подключен к второму входу второго ключа и является вторым выходом блока.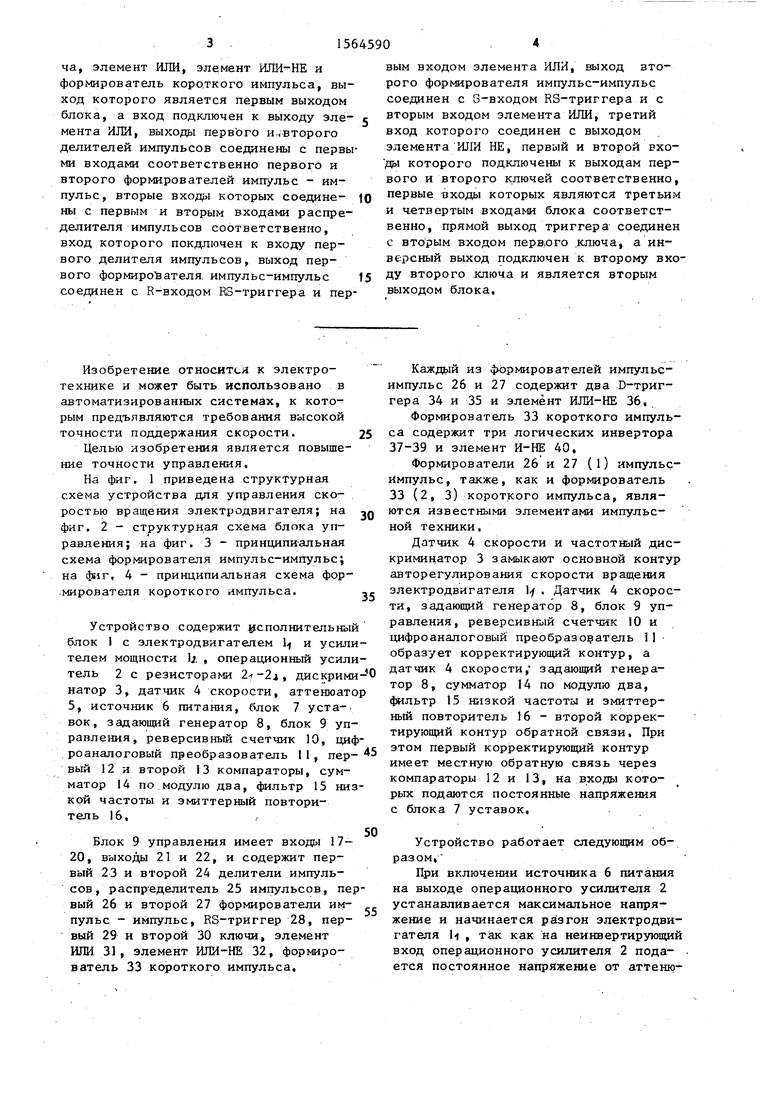

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1986 |
|
SU1661951A1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЛАЖНОСТИ | 2009 |
|
RU2399039C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2003 |
|
RU2244311C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2002 |
|
RU2226695C1 |
| Электропривод | 1987 |
|
SU1495971A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |

С целью повышения точности управления в устройство введены задающий генератор, реверсивный счетчик, блок управления, два компаратора, блок уставок, сумматор по модулю два, фильтр низкой частоты, эмиттерный повторитель и цифроаналоговый преобразователь. Блок управления содержит первый и второй делители импульсов, входы которых являются первым и вторым входами блока, распределитель импульсов, два формирователя импульс-импульс, RS-триггер, два ключа, элемент ИЛИ, элемент ИЛИ - НЕ и формирователь короткого импульса.
Изобретение относитсл к электротехнике и может быть использовано в автоматизированных системах, к которым предъявляются требования высокой точности поддержания скорости.25
Целью изобретения является повышение точности управления.
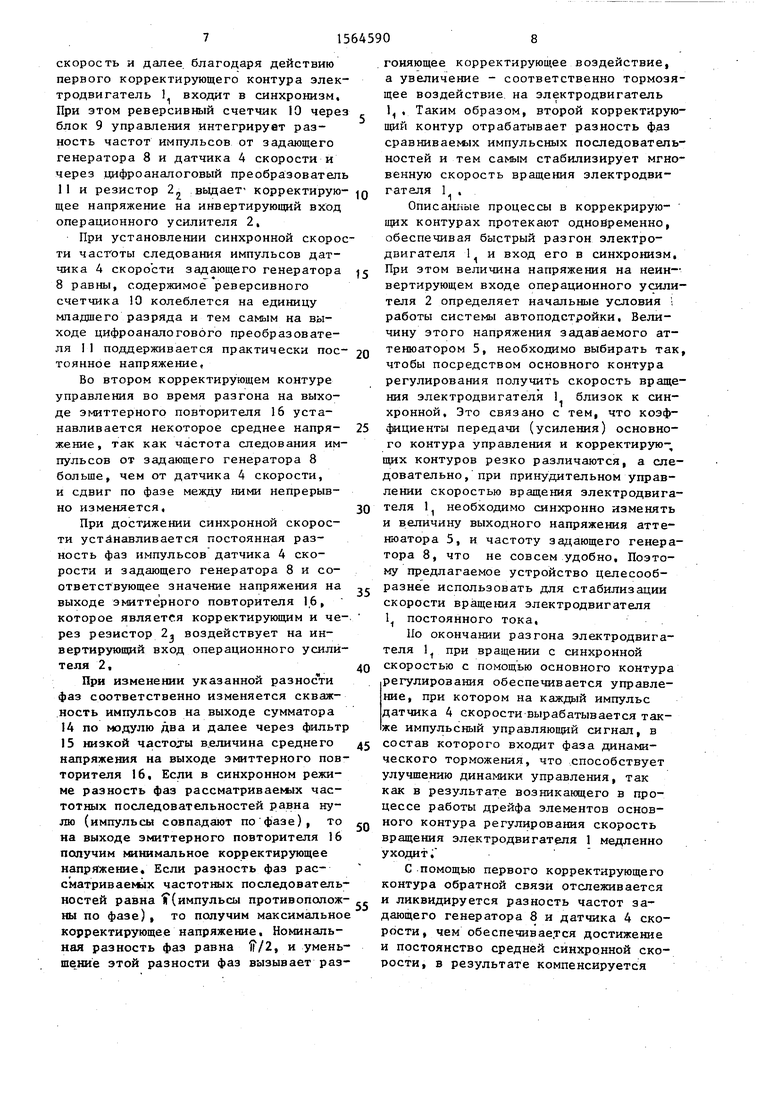
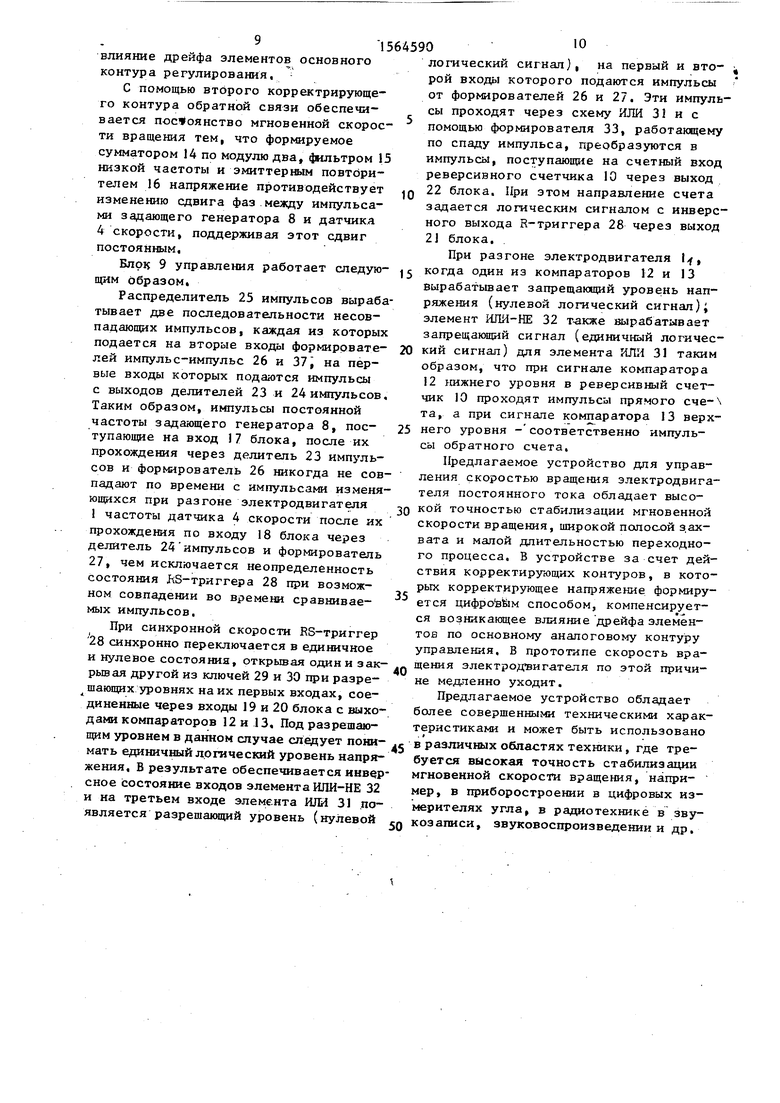
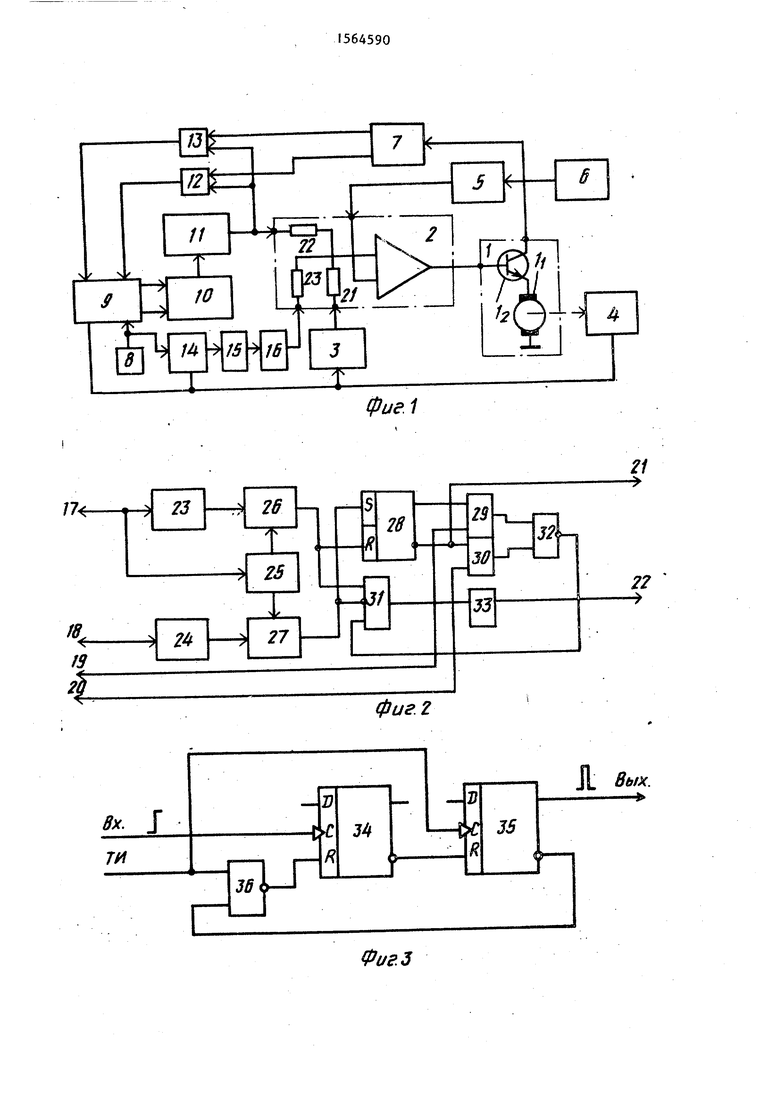
На фиг. 1 приведена структурная схема устройства для управления скоростью вращения электродвигателя; на , фиг. 2 - структурная схема блока управления; на фиг. 3 - принципиальная схема формирователя импульс-импульс; на фнг, 4 - принципиальная схема формирователя короткого импульса.
Устройство содержит исполнительный блок 1 с электродвигателем LJ и усилителем мощности Ц , операционный усилитель 2 с резисторами 2-f-2j, дискриминатор 3, датчик 4 скорости, аттенюатор 5, источник 6 питания, блок 7 уставок, задающий генератор 8, блок 9 управления, реверсивный счетчик 10, циф- роаналоговый преобразователь 11, пер- 4 вый 12 и второй 13 компараторы, сумматор 14 по модулю два, фильтр 15 низкой частоты и эмиттерный повторитель 16,
5
Блок 9 управления имеет входы 17-
20, выходы 21 и 22, и содержит первый 23 и второй 24 делители импульсов, распределитель 25 импульсов, первый 26 и второй 27 формирователи импульс - импульс, RS-триггер 28, первый 29 и второй 30 ключи, элемент ИЛИ 31, элемент ИЛИ-НЕ 32, формирователь 33 короткого импульса.
Каждый из формирователей импульс- импульс 26 и 27 содержит два D-триг- гера 34 и 35 и элемент ИЛИ-НЕ 36,
Формирователь 33 короткого импульса содержит три логических инвертора 37-39 и элемент И-НЕ 40,
Формирователи 26 и 27 (1) импульс- Импульс, также, как и формирователь 33 (2, 3) короткого импульса, являются известными элементами импульсной техники.
Датчик 4 скорости и частотный дискриминатор 3 замыкают основной контур авторегулирования скорости вращения электродвигателя Ц , Датчик 4 скорости, задающий генератор 8, блок 9 управления, реверсивный счетчик 10 и цифроаналоговый преобразователь 1 образует корректирующий контур, а датчик 4 скорости, задающий генератор 8, сумматор 14 по модулю два, фильтр 15 низкой частоты и эмиттерный повторитель 16 - второй корректирующий контур обратной связи, При этом первый корректирующий контур имеет местную обратную связь через компараторы 12 и 13, на входы которых подаются постоянные напряжения с блока 7 уставок.
Устройство работает следующим образом,
При включении источника 6 питания на выходе операционного усилителя 2 устанавливается максимальное напряжение и начинается разгон электродвигателя Н , так как на неинвертирующий вход операционного усилителя 2 подается постоянное напряжение от аттенюагора 5, а на инвертирующем входе устанавливается пониженное напряжение вследствие низкой частоты следования импульсов датчика 4 скорости и соответствующего действия корректирующих контуров обратной связи,
В основном контуре регулирования на выходе частотного дискриминатора 3 от каждого прямоугольного импульса датчика 4 скорости формируется импульс с экспоненциально растущим и убывающим фронтами, В результате сравнения этих импульсов напряжений, поступающих через резистор 2П на инвертирующий вход операционного усилителя 2, с напряжением, поступающим с выхода аттенюатора 5 на неинвертирующий вход операционного усилителя 2, последний вырабатывает напряжение для управления электродвигателем 1 , в котором имеет место фаза разгона (когда электродвигатель 1, подключен к источнику 6 питания) и фаза динамкудерживается низкий уровень напряжения, задаваемый блоком 7 уставок.
При достижении синхронной скорости вращения и превышении ее частота импульсов датчика 4 скорости становится больше частоты импульсов задающего генератора 8, 3 результате блок 9 управления формирует импульсы в нап10 равлении суммирования для реверсивного счетчика 10, При этом кодовое состояние последнего растет и соответственно растет напряжение на выходе цифроаналогового преобразователя 11,
15 которое через резистор 2/ воздействует на инвертирующий вход операционно- го усилителя 2, С увеличением напряжения на инвертирующем входе операционного усилителя 2 в выходном сигнале
20 последнего уменьшается фаза разгона и увеличивается фаза динамического торможения электродвигателя Ц , В результате при перерегулировании начинает возрастать тормозящее воздейстческого торможения (когда электродвига- 5 вие на электродвигатель 1 1, При силь- тель Ц отключен от источника 6 питания), ном перерегулировании содержимое ре- Такое широтно-импульсное управлениеверсивного счетчика 10 быстро растет,
соответственно растет выходное напряжение цифроаналогового преобразиватепозволяет более динамично и эффективно управлять электродвигателем 1,.
ЗС ля 11, На некотором уровне напряжения, задаваемого блоком 7 уставок, срабатывает компаратор 3 верхнего уровня и в блоке 9 управления запрещается формирование импульсов в напВ первом корректирующем контуре блок 9 управления сравнивает частоту следования импульсов датчика 4 скорости с частотой следования импульсов задающего генератора 8 и формиру- , равлении суммирования, Таким образомв ет счетные импульсы для реверсивноговыходное напряжение цифроаналогового
счетчика 10 и сигнал направления сче- преобразователя 11 ограничивается на та, Импульсы задающего генератора 8некотором (верхнем) уровне напряжеуменьшают содержимое реверсивного счетчика 10, а импульсы датчика скорости 4 - увеличивают., Во время раз40
ния, Такое двухстороннее ограничение работы цифроаналогового преобразователя 11 вместе с реверсивным счетчиком 10 позволяет исключить возможное переполнение реверсивного счетчика 10 как в прямом, так и в обратном напгона электродвигателя 1, частота импульсов датчика 4 скорости меньше частоты импульсов задающего генератора 8, поэтому произвольное число, за- 45 равлении, а следовательно, и возможписанное в реверсивный счетчик 10 в момент включения питания, уменьшается и соответственно уменьшается напряжение на выходе цифроаналогового
ность формирования резкого скачка корректирующего напряжения, что повело бы к ухудшению переходного процесса, В результате усиливается затуха- преобразователя 11 до уровня, заданно-50 переходного процесса и сокращает- го блоком 7 уставок с помощью компа-ся его длительность,
ратора нижнего уровня, при срабатыва-Таким образом, первый корректируюнии которого в блоке 9 управления запрещается формирование вычитающих, им55
пульсов и разрешается формирование только суммирующих импульсов для реверсивного счетчика 10, В результате счет останавливается и на выходе цифроаналогового преобразователя 11
щий контур на стадии разгона также способствует разгону электродвигателя 1 , но гораздо в меньшей степени
1
по сравнению с основным контуром управления ,
I Основной контур управления выводит .электродвигатель 1Д на подсинхронную
удерживается низкий уровень напряжения, задаваемый блоком 7 уставок.
При достижении синхронной скорости вращения и превышении ее частота импульсов датчика 4 скорости становится больше частоты импульсов задающего генератора 8, 3 результате блок 9 управления формирует импульсы в нап0 равлении суммирования для реверсивного счетчика 10, При этом кодовое состояние последнего растет и соответственно растет напряжение на выходе цифроаналогового преобразователя 11,
5 которое через резистор 2/ воздействует на инвертирующий вход операционно- го усилителя 2, С увеличением напряжения на инвертирующем входе операционного усилителя 2 в выходном сигнале
0 последнего уменьшается фаза разгона и увеличивается фаза динамического торможения электродвигателя Ц , В результате при перерегулировании начинает возрастать тормозящее воздейстля 11, На некотором уровне напряжения, задаваемого блоком 7 уставок, срабатывает компаратор 3 верхнего уровня и в блоке 9 управления запрещается формирование импульсов в нап
ния, Такое двухстороннее ограничение работы цифроаналогового преобразователя 11 вместе с реверсивным счетчиком 10 позволяет исключить возможное переполнение реверсивного счетчика 10 как в прямом, так и в обратном напщий контур на стадии разгона также способствует разгону электродвигателя 1 , но гораздо в меньшей степени
1
по сравнению с основным контуром управления ,
I Основной контур управления выводит .электродвигатель 1Д на подсинхронную
скорость и далее благодаря действию первого корректирующего контура электродвигатель 11 входит в синхронизм. При этом реверсивный счетчик 10 через блок 9 управления интегрирует разность частот импульсов от задающего генератора 8 и датчика 4 скорости и через цифроаналоговый преобразователь 11 и резистор 2„ выдает корректирую- щее напряжение на инвертирующий вход операционного усилителя 2,
При установлении синхронной скорости частоты следования импульсов датчика 4 скорости задающего генератора 8 равны, содержимое реверсивного счетчика 0 колеблется на единицу младшего разряда и тем самым на выходе цифроаналогового преобразователя I1 поддерживается практически пос- тоянное напряжение,
Во втором корректирующем контуре управления во время разгона на выходе эмиттерного повторителя 16 устанавливается некоторое среднее напря- жение, так как частота следования импульсов от задающего генератора 8 больше, чем от датчика 4 скорости, и сдвиг по фазе между ними непрерывно изменяется,
При достижении синхронной скорости устанавливается постоянная разность фаз импульсов датчика 4 скорости и задающего генератора 8 и соответствующее значение напряжения на выходе эмиттерного повторителя 16, которое является корректирующим и че- рез резистор 2, воздействует на инвертирующий вход операционного усилителя 2,
При изменении указанной разности фаз соответственно изменяется скважность импульсов на выходе сумматора
14по модулю два и далее через фильтр
15низкой частоты величина среднего напряжения на выходе эмиттерного повторителя 16, Если в синхронном режиме разность фаз рассматриваемых частотных последовательностей равна нулю (импульсы совпадают по фазе), то на выходе эмиттерного повторителя 16 получим минимальное корректирующее напряжение. Если разность фаз рассматриваемых частотных последовательностей равна Т(импульсы противополож- ны по фазе), то получим максимальное корректирующее напряжение. Номинальная разность фаз равна 1Г/2, и уменьшение этой разности фаз вызывает разгоняющее корректирующее воздействие, а увеличение - соответственно тормозящее воздействие на электродвигатель 1, , Таким образом, второй корректирующий контур отрабатывает разность фаз сравниваемых импульсных последовательностей и тем самым стабилизирует мгновенную скорость вращения электродвигателя 1 .
Описанные процессы в коррекрирую- щих контурах протекают одновременно, обеспечивая быстрый разгон электродвигателя 1 и вход его в синхронизм, При этом величина напряжения на неин- вертирующем входе операционного усилителя 2 определяет начальные условия работы системы автоподстройки, Величину этого напряжения задаваемого аттенюатором 5, необходимо выбирать так чтобы посредством основного контура регулирования получить скорость вращения электродвигателя 1 близок к синхронной. Это связано с тем, что коэффициенты передачи (усиления) основного контура управления и корректирую- щих контуров резко различаются, а следовательно, при принудительном управлении скоростью вращения электродвигателя Ц необходимо синхронно изменять и величину выходного напряжения аттенюатора 5, и частоту задающего генератора 8, что не совсем удобно. Поэтому предлагаемое устройство целесообразнее использовать для стабилизации скорости вращения электродвигателя постоянного тока.
Но окончании разгона электродвигателя lj при вращении с синхронной скоростью с помощью основного контура регулирования обеспечивается управление, при котором на каждый импульс датчика 4 скорости вырабатывается также импульсный управляющий сигнал, в состав которого входит фаза динамического торможения, что способствует улучшению динамики управления, так как в результате возникающего в процессе работы дрейфа элементов основного контура регулирования скорость вращения электродвигателя 1 медленно уходит.
С помощью первого корректирующего контура обратной связи отслеживается и ликвидируется разность частот задающего генератора 8 и датчика 4 скорости, чем обеспечивае.тся достижение и постоянство средней синхронной скорости, в результате компенсируется
влияние дрейфа элементов основного контура регулирования,
С помощью второго корректрирующе- го контура обратной связи обеспечивается постоянство мгновенной скорости вращения тем, что формируемое сумматором 14 по модулю два, фильтром 15 низкой частоты и эмиттерным повторителем 16 напряжение противодействует изменению сдвига фаз между импульсами задающего генератора 8 и датчика 4 скорости, поддерживая этот сдвиг постоянным.
Блок 9 управления работает следующим образом.
Распределитель 25 импульсов вырабатывает две последовательности несовпадающих импульсов, каждая из которых
подается на вторые входы формировате- 20 кий сигнал) для элемента ИЛИ 31 таким
лей импульс-импульс 26 и 37, на первые входы которых подаются импульсы с выходов делителей 23 и 24 импульсов. Таким образом, импульсы постоянной частоты задающего генератора 8, поступающие на вход 17 блока, после их прохождения через делитель 23 импульсов и формирователь 26 никогда не совпадают по времени с импульсами изменяющихся при разгоне электродвигателя 1 частоты датчика 4 скорости после их прохождения по входу 18 блока через делитель 24 импульсов и формирователь 27, чем исключается неопределенность состояния hS-триггера 28 при возможном совпадении во времени сравниваемых импульсов.
При синхронной скорости RS-триггер 28 синхронно переключается в единичное и нулевое состояния, открывая один и закрывая другой из ключей 29 и 30 при разре- шающих уровнях на их первых входах, соединенные через входы 19 и 20 блока с выхоПредлагаемое устройство обладает более совершенными техническими харак теристиками и может быть использовано
дами компараторов 12 и 13. Под разрешающим уровнем в данном случае следует пони- 45 в различных областях техники, где тре- мать единичный логический уровень напря- буется высокая точность стабилизации жения, В результате обеспечивается инверсное состояние входов элемент а ИЛИ-НЕ 32 и на третьем входе элемента ИЛИ 31 помгновенной скорости вращения, например, в приборостроении в цифровых измерителях угла, в радиотехнике в звумгновенной скорости вращения, например, в приборостроении в цифровых из мерителях угла, в радиотехнике в зву
является разрешающий уровень (нулевой 5Q козаписи, звуковоспроизведении и др.
5
логический сигнал), на первый и вто- , рой входы которого подаются импульсы от формирователей 26 и 27. Эти импульсы проходят через схему ИЛИ 3 и с помощью формирователя 33, работающему по спаду импульса, преобразуются в импульсы, поступающие на счетный вход реверсивного счетчика 10 через выход 22 блока. При этом направление счета задается логическим сигналом с инверсного выхода R-триггера 28 через выход 21 блока.
При разгоне электродвигателя 1, когда один из компараторов 12 и 13 вырабатывает запрещающий уровень напряжения (нулевой логический сигнал); элемент ИЛИ-НЕ 32 также вырабатывает запрещающий сигнал (единичный логичес5
образом, что при сигнале компаратора 12 нижнего уровня в реверсивный счетчик 10 проходят импульсы прямого сче- та, а при сигнале компаратора 13 верхнего уровня - соответственно импульсы обратного счета,
Предлагаемое устройство для управления скоростью вращения электродвигателя постоянного тока обладает высо- о кой точностью стабилизации мгновенной скорости вращения, широкой полосой захвата и малой длительностью переходного процесса, В устройстве за счет действия корректирующих контуров, в которых корректирующее напряжение формируется цифровым способом, компенсирует -.
ся возникающее влияние дрейфа элементов по основному аналоговому контуру управления. В прототипе скорость вращения электродвигателя по этой причине медленно уходит.
Предлагаемое устройство обладает более совершенными техническими характеристиками и может быть использовано
5
0
5 в различных областях техники, где тре- буется высокая точность стабилизации
в различных областях техники, где тре- буется высокая точность стабилизации
мгновенной скорости вращения, например, в приборостроении в цифровых измерителях угла, в радиотехнике в звукозаписи, звуковоспроизведении и др.
Ц
&
У
Т
а
-4ffЈ
ш
к
жJ
гзпф
V
Дм.
фиг. 4
| Ланцов А.Л | |||
| и др | |||
| Цифровые устройства на комплементарных ЩИ интегральных микросхемах | |||
| М.: Радио и связь, 1983, с | |||
| Паровоз с приспособлением для автоматического регулирования подвода и распределения топлива в его топке | 1919 |
|
SU272A1 |
| Гутников В,С, Интегральная электроника в измерительных устройствах, Л | |||
| Энергия, 1930, с | |||
| Телефонная трансляция с местной цепью для уничтожения обратного действия микрофона | 1924 |
|
SU348A1 |
| Петросян К.А,, Атоян Р.В | |||
| Специальные схемы цифровых устройств, Библиотека по автоматике, вып | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| с, 67, Авторское свидетельство СССР № 898580, шт | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления скоростью вращения электродвигателя лентопротяжного механизма | 1977 |
|
SU615532A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
