Изобретение относится к управлению электрическими машинами и может быть использовано в дискретном электроприводе, например, в станках с чис- ловым программным управлением.
Цель изобретения - повышение быстродействия двигателя путем сокращения времени торможения.
На фиг. 1 приведена блок-схема уст ройства для управления шаговым двигателем; на фиг. 2 - схема генератора; на фиг. 3 - схема компаратора; на фиг. 4 - элемент сравнения кодов; на фиг.5 - блок анализа динамической ошибки двигателя; на фиг. 6 - дополнительный блок анализа динамической ошибки двигателя; на фиг. 7 - график изменения скорости двигателя на дистанции 200 мм.
Устройство содержит генератор 1 с двумя входами Р и Т для увеличения и снижения частоты соответственно. Выход генератора 1 соединен через первый вход ключа 2 с коммутатором 3 фаз шагового двигателя 4. На оси шагового двигателя 4 установлен датчик 5 шагов, выход которого подключен к первому входу компаратора 6. Выход ключа 2 соединен с вторым входом компаратора 6 и со счетным входом счетчика 7 с предварительной установкой .
Выходы компаратор 6 подключены к прямому и обратному входам реверсивного счетчика 8, выход которого подключен к первому входу блока 9 анализа динамической ошибки двигателя, второй вход которого подключен к первому выходу дешифратора 10, вход которого подключен к выходу счетчика 7. Второй выход элемента 10 подключен к второму входу ключа 2, а третий выход - к первому входу дополнительного блока 1 анализа динамической ошибки двигате- ля, второй вход которого подключен к выходу реверсивного счетчика 8. Пер вьш и второй выходы блока 9 подключены к первым входам элементов И 12 и 13 соответственно.
Первый и второй выходы блока 11 подключены к вторым входам элементов И 12 и 13 соответственно. Выходы элементов И 12 и 13 подключены к вхо
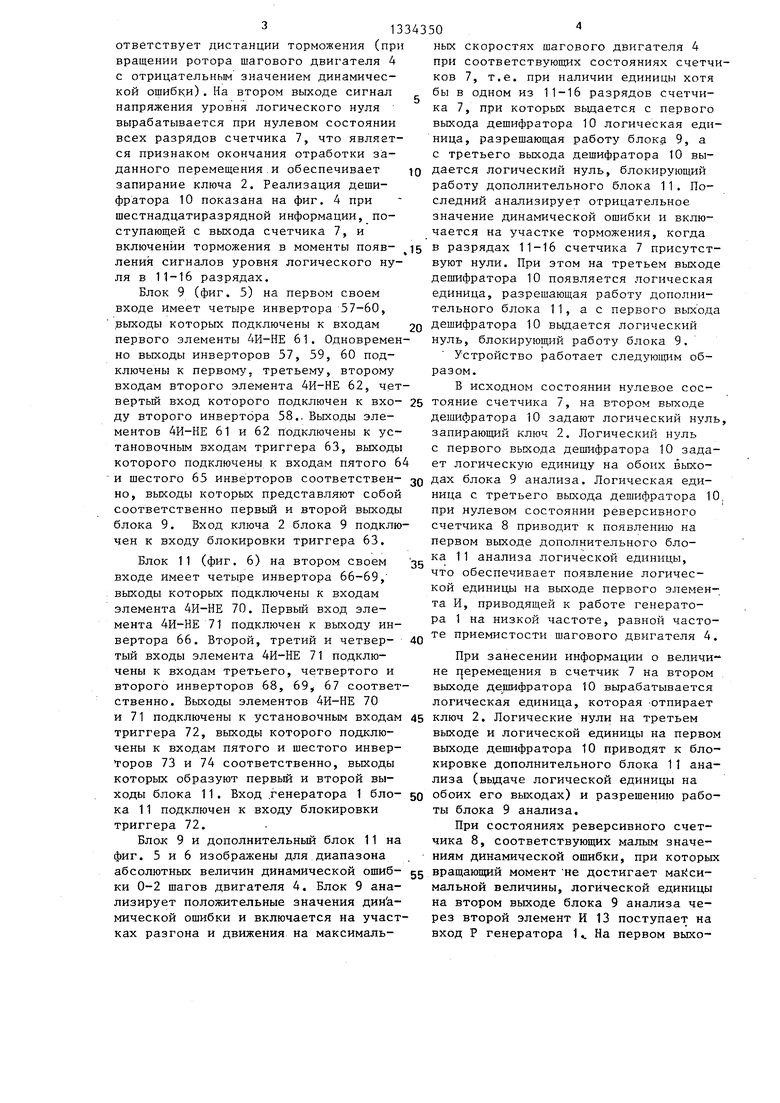
дам Т и Р генератора 1 соответственно.55 ля 4 с положительным значением динами- Генератор 1 (фиг, 2) релаксационного ческой ошибки). На третьем выходе сиг- типа реализован на базе четьфех эле- нал уровня логической единицы выраба- ментов 2И-НЕ 14-17. Частота генерато- тывается при нулевом состоянии шести ра задается конденсаторами 18 и 19 старших разрядов счетчика 7, что со5
0
5
о
045
и резисторами 20 и 21. Плавное нарастание-снижение; час готы происходит при отпирании-запирании транзистора 22 и запирании-отпирании транзистора 23.
Конденсатор 24 и резисторы 25 и 26 определяют законы сн -1жения и увеличения частоты генератора. Ключ 2 представляет собой схему совпадения с двумя входами и может быть реализован на микросхеме 2И-НЕ, на один из входов которой подключается выход генератора, а на второй вход - второй выход дешифратор 10,
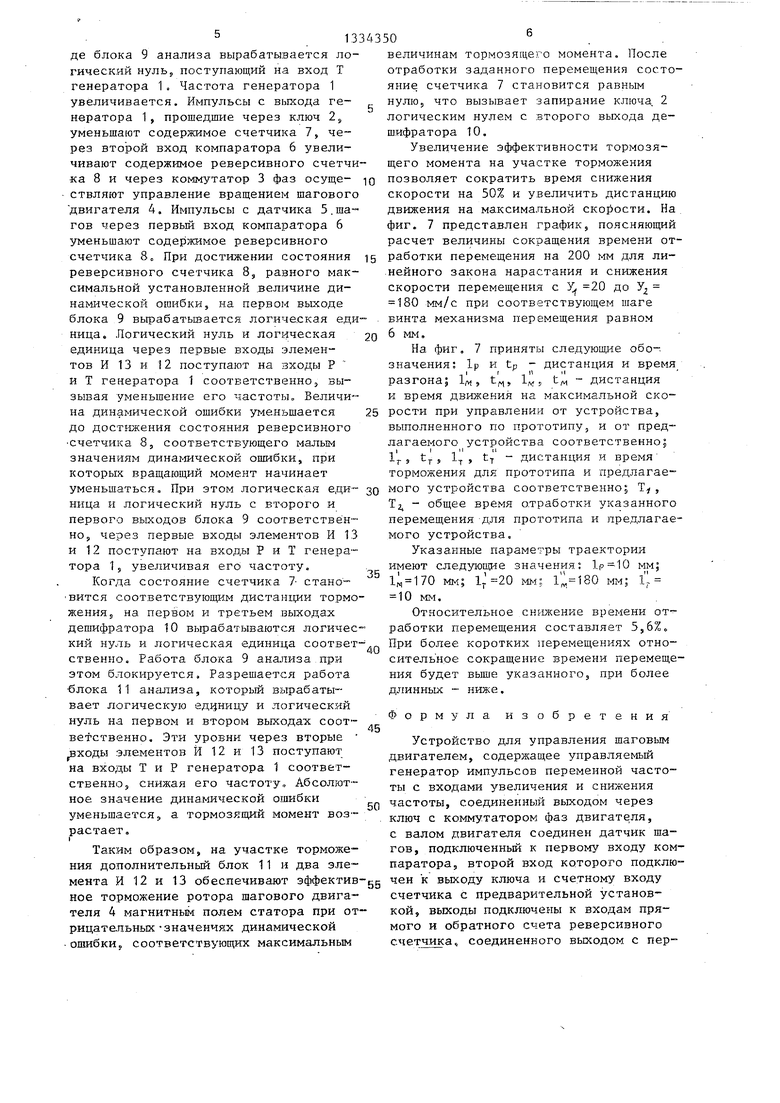
Коммутатор 3 является сдвиговым реверсивным регистром с двенадцатью состояниями. Компаратор 6 (фиг, 3) состоит из двух идентичных каналов, включающих в себя, соответственно, два триггера 27 и 28, и 29 и 30, инверторы 31 и 32, элементы 2И-НЕ 33 и 34.
Первый и второй входы компаратора 6 представляют собой входы первого и второго каналов, а выходы компаратора - выходы этих двух каналов. Импульсы напряжения, поступающие на первый и второй входы компаратора 6, преобразуются на его выходах синхронно - с двумя сдвинутыми на полпериода тактирующими сериями импульсов 1т и 2т, вырабатываемых генератором 35, Тактирующие серии импульсов в каналах компаратора 6 перекрещены: 1т для первого канала - это 2т для второго канала и наоборот. Поэтому выходные сигналы компаратора не перекрываются во времени независимо от времени поступления входных сигналов. Счетчик 7 является двоичным счетчиком с входом предварительной установки.
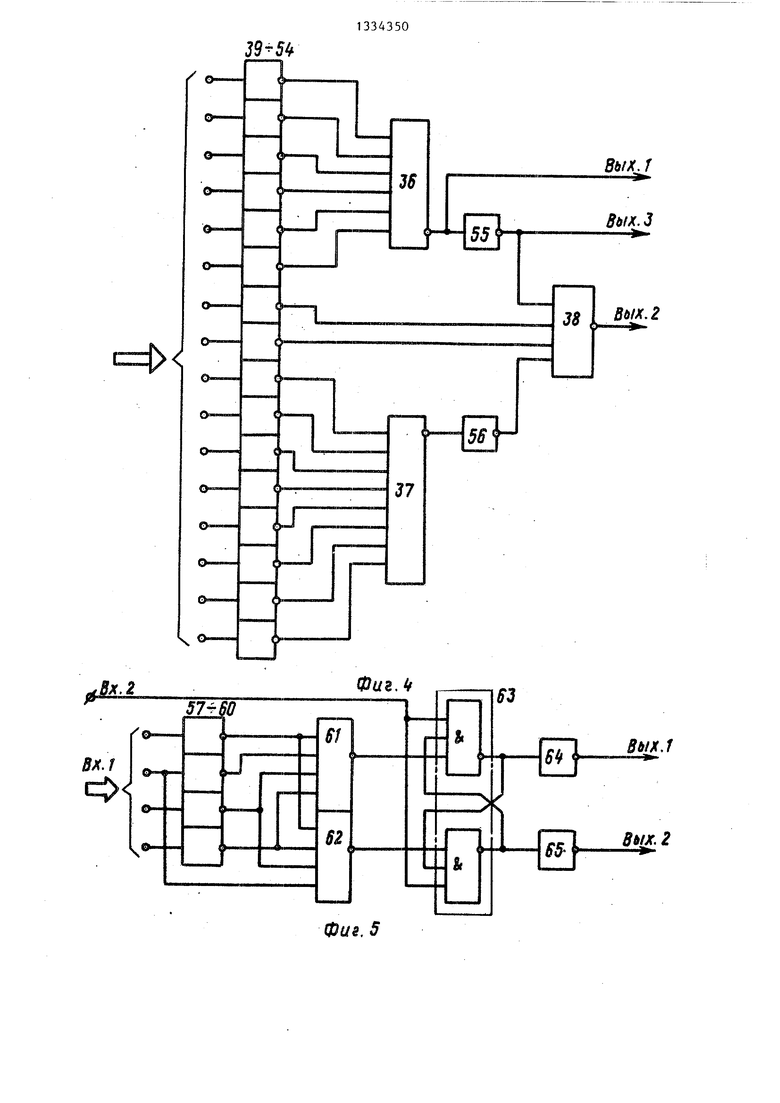
Дешифратор 10 (фиг, 4) реализован на типовых элементах логики: двух схемах 8И-НЕ 36 и 37, одной схеме 4И- НЕ 38, восемнадцати инверторах 39-56. Дешифратор 10 на своих трех выходах вырабатывает следующие сигналы. На первом выходе сигнал уровня напряжения логической единицы вьфабатывается 0 при наличии хотя бы одной единицы в шести старших разрядах счетчика 7, что соответствует участку разгона и движения на максимальной скорости (при вращении ротора шагового двигате0
35
31334350
ответствует дистанции торможения (при ныхскоростях шагового двигателя 4
вращении ротора шагового двигателя 4 присоответствуюпщх состояниях счетчис отрицательным значением динамичес- ков7, т.е. при наличии единицы хотя
кой ошибк.и) . На втором выходе сигнал бы в одном из 11-16 разрядов счетчи -
напряжения уровня логического нуля ка 7, при которых выдается с первого
вырабатывается при нулевом состоянии выхода дешифратора 10 логическая еди- всех разрядов счетчика 7, что являет- ница, разрешающая работу блока 9, а ся признаком окончания отработки за- с третьего выхода дешифратора 10 выданного перемещения.и обеспечивает ю Дается логический нуль, блокирующий запирание ключа 2. Реализация деши- работу дополнительного блока 11. По- фратора 10 показана на фиг. 4 при следний анализирует отрицательное шестнадцатиразрядной информации, по- значение динамической ошибки и вклю- ступающей с выхода счетчика 7, и чается на участке торможения, когда включении торможения в моменты появ- j5 в разрядах 11-16 счетчика 7 ирисутст- ления сигналов уровня логического ну- вуют нули. При этом на третьем выходе ля в 11-16 разрядах.дешифратора 10 появляется логическая
Блок 9 (фиг. 5) на первом своем единица, разрешающая работу дополни- входе имеет четыре инвертора 57-60, тельного блока 11, а с первого выхода выходы которых подключены к входам 20 Дешифратора 10 выдается логический первого элементы 4И-НЕ 61. Одновремен- нуль, блокирующий работу блока 9. но выходы инверторов 57, 59, 60 под- Устройство работает следующим об- ключены к первому, третьему, второму разом.
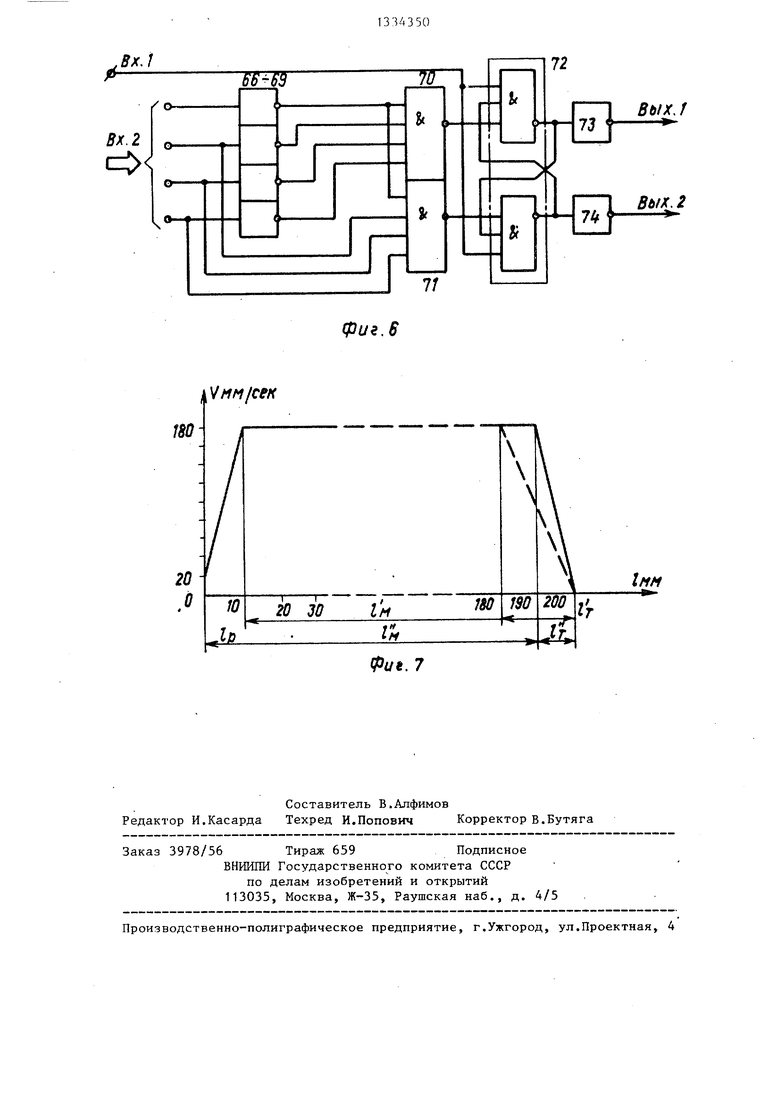
входам второго элемента 4И-НЕ 62, чет- В исходном состоянии нулев.ое сос- вертый вход которого подключен к вхо- 25 тояние счетчика 7, на втором выходе ду второго инвертора 58.. Вькоды эле- дешифратора 10 задают логический нуль, ментов 4И-НЕ 61 и 62 подключены к ус- запирающий ключ 2. Логический нуль тановочным входам триггера 63, выходы с первого выхода дешифратора 10 зада- которого подключены к входам пятого 64 ет логическую единицу на обоих выхо- и шестого 63 инверторов соответствен- зо Д блока 9 анализа. Логическая едино, выходы которых представляют собой ница с третьего выхода дешифратора 10, соответственно первый и второй выходы при нулевом состоянии реверсивного блока 9. Вход ключа 2 блока 9 подклю- счетчика 8 приводит к появлению на чен к входу блокировки триггера 63. первом выходе дополнительного блоБлок 11 (фиг. 6) на втором своем з5 анализа логической еднтщы, входе имеет четыре инвертора 66-69, обеспечивает появление логичес- выходы которых подключены к входам ° единицы на выходе первого элемен- элемента 4И-НЕ 70. Первый вход эле- приводящей к работе генерато- мента 4И-НЕ 71 подключен к выходу ин- Р « частоте, равной часто- вертора 66. Второй, третий и четвер- 40 приемистости шагового двигателя 4. тый входы элемента 4И-НЕ 71 подклю- При занесении информации о величи чены к входам третьего, четвертого и не г еремещения в счетчик 7 на втором второго инверторов 68, 69, 67 соответ- выходе де иифратора 10 вырабатывается ственно. Выходы элементов 4И-НЕ 70 логическая единица, которая -отпирает и 71 подключены к установочным входам 45 ключ 2. Логические нули на третьем триггера 72, выходы которого подклю- выходе и логической единицы на первом чены к входам пятого и шестого инвер- выходе дешифратора 10 приводят к бло- Торов 73 и 74 соответственно, выходы кировке дополнительного блока 11 ана- которых образуют первый и второй вы- лиза (вьщаче логической единицы на ходы блока 11. Вход .генератора 1 бло- 50 обоих его выходах) и разрешению рабо- ка 11 подключен к входу блокировки ты блока 9 анализа.
триггера 72. При состояниях реверсивного счетБлок 9 и дополнительный блок 11 на чика 8, соответствующих малым значе- фиг. 5 и 6 изображены для диапазона ниям динамической ошибки, при которых абсолютных величин динамической ошиб- gg вращающий момент не достигает ки 0-2 шагов двигателя 4. Блок 9 ана- мальной величины, логической единицы лизирует положительные значения дин а- на втором выходе блока 9 анализа че- мической ошибки и включается на участ- рез второй элемент И 13 поступает на ках разгона и движения на максималь- вход Р генератора 1 На первом выходе блока 9 анализа вырабатывается логический нуль, поступающий на вход Т генератора 1. Частота генератора 1 увеличивается. Импульсы с выхода генератора 1, прошедшие через ключ 2 уменьшают содержимое счетчика 7, через второй вход компаратора 6 увеличивают содержимое реверсивного счетчика 8 и через коммутатор 3 фаз осуще- ствляют управление вращением шагового двигателя 4. Импульсы с датчика 5.шагов через первый вход компаратора 6 уменьшают содержимое реверсивного счетчика 8, При достижении состояния реверсивного счетчика 8, равного максимальной установленной величине динамической ошибки, на первом выходе блока 9 вырабатьшается логическая еди ница. Логический нуль и логическая единРЕца через первые входы элементов И 13 и 12 поступают на входы Р и Т генератора 1 соответственно, вызывая уменьшение его частоты. Величина динамической ошибки утченьшается до достижения состояния реверсивного счетчика 8, соответствующего малым значениям динамической ошибки, при Которых вращающий момент начинает уменьшаться. При этом логическая еди™ ница и логический нуль с второго и первого выходов блока 9 соответственно, через первые входы элементов И 13 и 12 поступают на входы Р и Т генератора 1S увеличивая егс частоту.
Когда состояние счетчика стано- вится соответствующим дистанпэии тормо
дешифратора 10 вырабатываются логичес кий нуль и логическая единица соответственно. Работа блока 9 ана.11иза при этом блокирз ется. Разрешается работа блока 11 анализа, который вырабатывает логическую единицу и логический нуль на первом и втором выходах соответственно. Эти уровни через вторые ходы элементов И 12 и 13 поступают на входы Т и Р генератора 1 соответственно, снижая его частоту,. Абсолютное значение динамической ошибки уменьшается., а тормозящий момент воз- растает.
Устройство для управления шаговым двигателем, содержащее управляемый генератор импульсов переменной частоты с входами увеличения и снижения частоты, соединенный выходом через ключ с коммутатором фаз двигателя, с валом двигателя соединен датчик шагов, подключенный к первому входу компаратора, второй вход которого подклюТаким образом, на участке торможения дополнительный блок 11 и два элемента И 12 и 13 обеспечивают эффектив-ggчен к выходу ключа и счетному входу нее торможение ротора шагового двига счетчика с предварительной установ- теля 4 магнитным полем статора при от-кой, выходы подключены к входам пря- рицатепьныхзначениях динамическоймого и обратного счета реверсивного ошибки, соответствующих максимальнымсчетчика, соединенного выходом с пер
величинам тормозящего момента. После отработки заданного перемещения состояние счетчика 7 становится равным нулю5 что вызывает запирание ключа. 2 логическим нулем с второго выхода дешифратора 10.
Увеличение эффективности тормозя- ш,его момента на участке торможения позволяет сократить время снижения скорости на 50% и увеличить дистанцию движения на максимальной скорости. На, фиг, 7 представлен график, поясняющий расчет величины сокращения времени отработки перемещения на 200 мм для линейного закона нарастания и снижения скорости перемещения с У 20 до У 180 мм/с при соответствующем шаге винта механизма перемещения равном 6 мм.
На фиг, 7 приняты следующие обозначения: 1р и tp - дистанция и время разгона; 1, t , 1, t - дистанция и время движения на максимальной скорости при управлении от устройства, выполненного по прототипу, и от предлагаемого устройства соответственно; I j. S t 5 IT -т дистанция и время торможения для прототипа и предлагаемого устройства соответственно5 Т, Тд - общее время о.тработки указанного перемещения для прототипа и предлагаемого устройства.
Указанные параметры траектории имеют следующие значения; мм; 1 170 мм; мм; мм; 1% 10 мм.
Относительное снижение времени отработки перемещения составляет 5,6%. При более коротких перемещениях относительное сокращение времени перемещения будет выше указанного, при более длинных - ниже.
45
Формула изобретени
я
Устройство для управления шаговым двигателем, содержащее управляемый генератор импульсов переменной частоты с входами увеличения и снижения частоты, соединенный выходом через ключ с коммутатором фаз двигателя, с валом двигателя соединен датчик шагов, подключенный к первому входу компаратора, второй вход которого подключен к выходу ключа и счетному входу счетчика с предварительной установ- кой, выходы подключены к входам пря- мого и обратного счета реверсивного счетчика, соединенного выходом с первым входом блока анализа динамическо ошибки, второй вход которого соединен с первым вь1ходом элемента сравнения кодов, вход которого подключен к вькоду счетчика с предварительной установкой, отличающееся тем, что, с целью повышения быстродействия путем сокращения времени торможения, введены дополнительный блок анализа динамической ошибки и два элемента И, второй выход элеменн 13343508
та сравнения подключен к управляющему входу ключа, третий выход - к первому входу дополнительного блока анализа динамической ошибки, второй вход которого соединен с выходом
нены с первыми входами элементов И, вторые входы которых подключены к входам блока анализа динамической ошибки, а выходы - к входам увеличения и снижения частоты генератора.
фие.2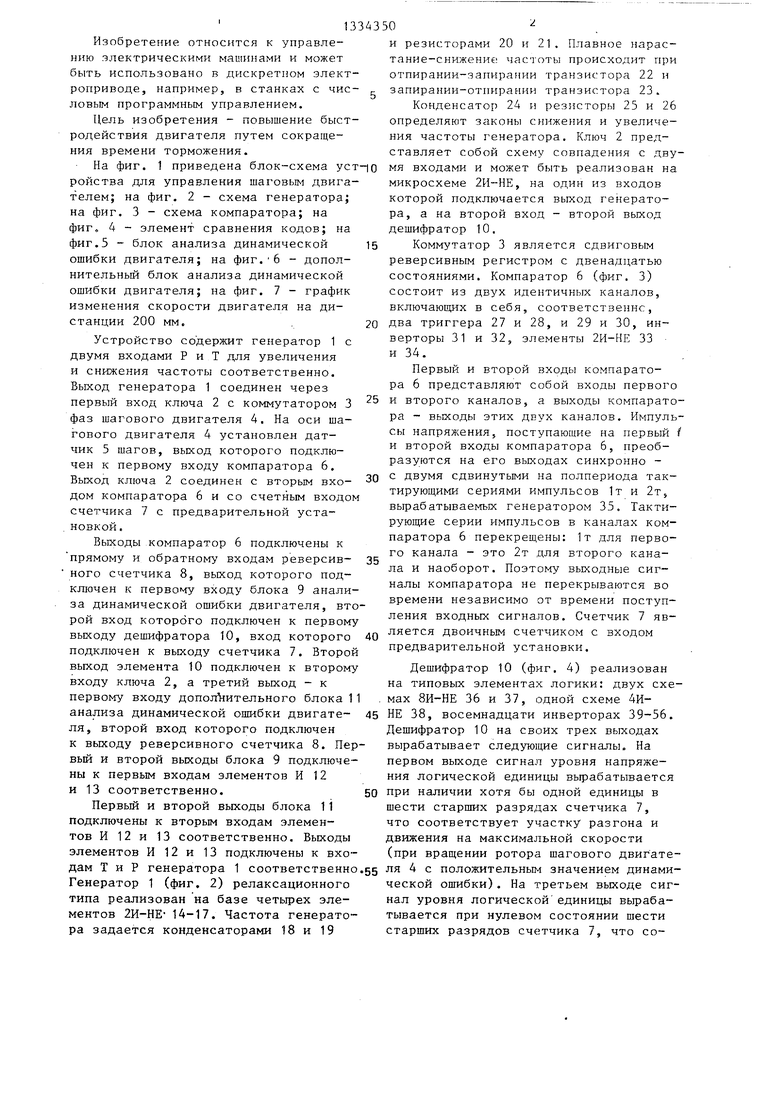
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU783941A2 |
| Устройство для управления положением исполнительных элементов | 1983 |
|
SU1226413A2 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1356176A2 |
| Устройство для измерения нелинейности пилообразного напряжения | 1990 |
|
SU1777101A1 |
| Устройство для обнаружения межвиткового замыкания и обрыва катушки ротора микродвигателя | 1990 |
|
SU1780052A1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1108600A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Следящий электропривод | 1985 |
|
SU1259207A2 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU928592A1 |
| ЧЕТЫРЕХТАКТНЫЙ РЕВЕРСИВНЫЙ РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ОДИНОЧНЫХ ОШИБОК | 2010 |
|
RU2475933C2 |
Изобретение относится к электротехнике и может использоваться в программно-управляемом оборудовании позиционного типа с шаговыми двигателями. Целью изобретения является повьшение быстродействия путем сокращения времени торможения. На всей дистанции перемещения устройство позволяет поддерживать абсолютное значение динамической ошибки (рассогласование между положениями ротора двигателя и магнитного поля в статоре) на уровне, обеспечивающем максимальные значения вращающего и тормозящего моментов как на участках разгона и движения на максимальных скоростях, так и на участке торможения. Величина динамической ошибки отражается со-. держимым реверсивного счетчика 8, на прямой и обратный входы которого поступают импульсы генератора 1 и датчика 5 шагов соответственно. Реверсивный счетчик 8 через дополнительный блок 9 анализа динамической ошибки и два элемента И 12 и 13 регулирует частоту генератора 1 на участке торможения, обеспечивая при эффективном торможении отработку заданных перемещений без потери шагов двигателем. 7 ил. S (Л 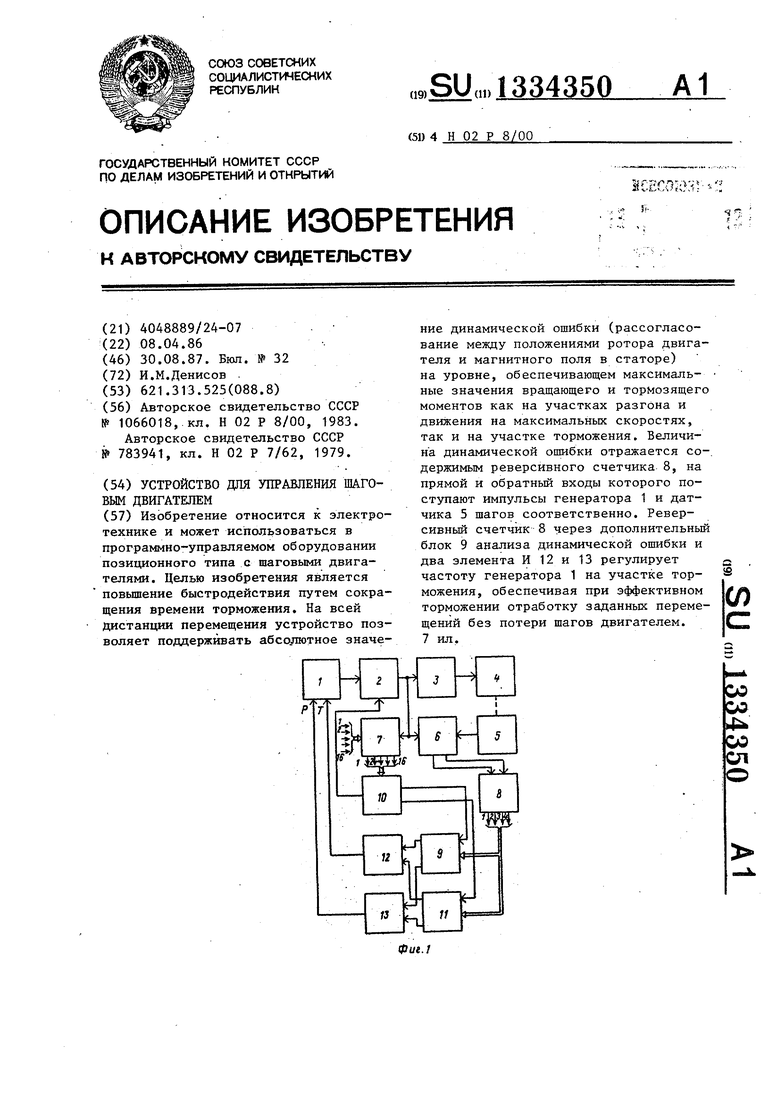
Sbtx.j
J9-5A
Фив, 5
фие.8
V/ifl/CfK
fpift. 7
| Устройство для управления шаговым двигателем | 1981 |
|
SU1066018A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU783941A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
