Фиг. 1
Изобретение относится к измерительной технике и может быть использовано в наземных автоматизированных системах контроля аэрометрического оборудования летательных аппаратов (ЛА) и бортовых комплексах оборудования в целом как генератор сигналов воздушных давлений с имитацией изменения воспринимаемых бортовыми приемниками статического и полного давлений (либо высоты и скорости полета).
Цель изобретения - увеличение быстродействия, повышение точности задания давления и упрощение.
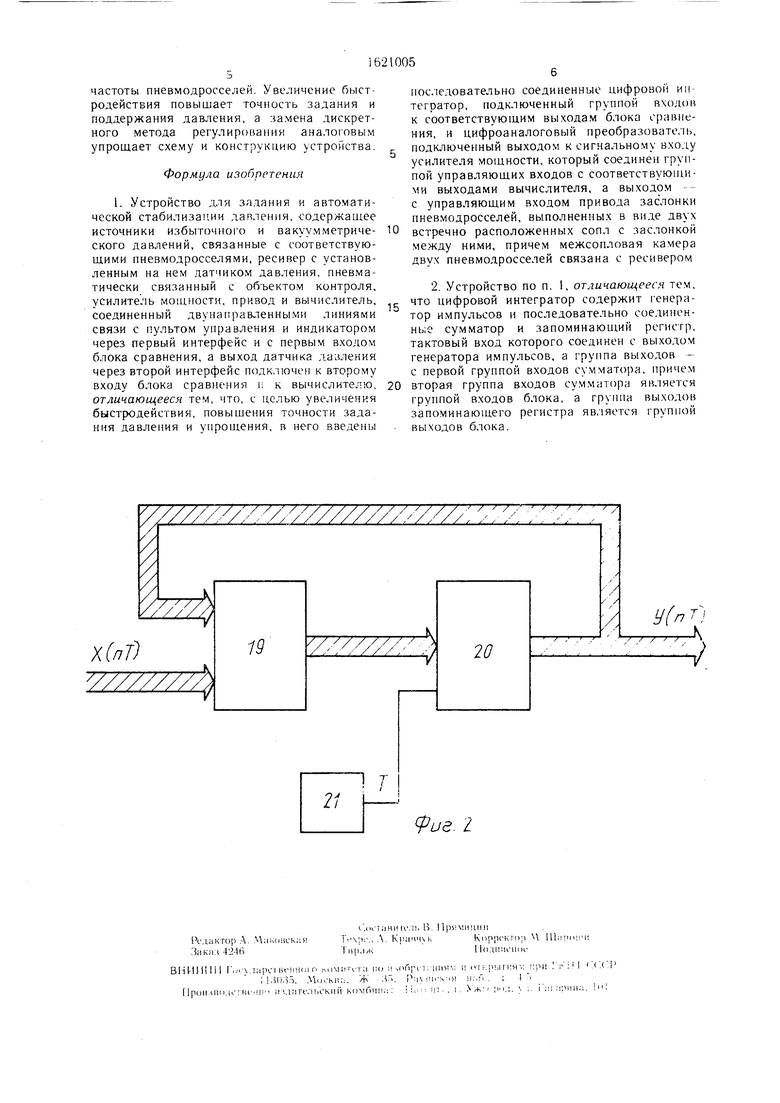
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - функциональная схема цифрового интегратора.
Устройство для задания и автоматической стабилизации давления содержит вычислитель 1, пульт 2 управления, интерфейс 3, индикатор 4, интерфейс 5, блок 6 сравнения, датчик 7 давления, ресивер
Выходной сигнал запоминающего регистра для каждого такта определяется как Y(nT)X(nT)+Y(n-l)T,
где Т - период импульсов генерато- 5ра 21;
Y(nT) - выходной код в п-м такте; Х(пТ) - входной код в п-м такте; Y(n-)T- выходной код в (и- 1)-м такте.
10 Цифровой интегратор 10 интегрирует сигнал ошибки во времени. Выходной сигнал цифрового интегратора 10 после преобразования в аналоговый сигнал цифроаналого- вым преобразователем 11 усиливается лителем 12 мощности, выходной сигнал которого является управляющим сигналом привода 13. Второй вход усилителя 12 мощности позволяет вычислителю 1 управлять значением коэффициента усиления усилителя 12 мощности, компенсируя тем самым
объект 9 контроля, цифровой интегратор 10, 20 изменение коэффициента усиления системы
цифроаналоговый преобразователь 11, уси- читель 12 мощности, привод 13, пневмодрос- сели 14 с заслонкой 15, являющиеся регулируемым пневмодросселем 16, источники 17 18 избыточного и вакуумметрического давлений соответственно.
Цифровой интегратор 10 содержит сум- мятор 19, запоминающий регистр 20 и гене- ргпор 21 импульсов.
Устройство работает следующим обра юм
С пульта 2 управления осуществляется набор заданного давления в виде кода, ко- горыи индицируется индикатором 4 через интерфейс 3. Цри нажатии кнопки «Ввод пчльга 2 управления код задаваемого давления поступает с интерфейса 3 в вычислитель 1, где записана характеристика датчика 7 явления в виде последовательности кодов. Вычислитель 1 преобразует код заданного давления в код, соответствующий коду кривой датчика 7 давления, запоминает и выводит его на блок 6 сравнения.
Датчик 7 давления осуществляет непрерывное измерение давления в ресивере 8 и обьекте 9 контроля. Сигнал датчика 7 дав- .1ГНИЯ преобразуется интерфейсом 5 в двоич- чый код и поступает на блок 6 сравнения ч в вычислитель 1. Блок 6 сравнивает код заданного давления с кодом давления в ресивере 8 и объекте 9 контроля и выдает сигнал ошибки рассогласования системы регулирования давления на вход цифрового интегратора 10, который работает следующим образом: входной цифровой сигнал (код) поступает на первый вход двоичного сумматора 19. на второй вход двоичного сумма- гора 19 поступает цифровой сигнал (код) с выхода запоминающего регистра 20. В результате сумма кодов поступает на вход запоминающего регистра 20 и запоминается в нем при приходе импульса на второй тактовый вход запоминающего регистра 20.
35
регулирования по диапазону регулируемых давлений, что обеспечивает устойчивость и качество регулирования системы. Выходной сигнал усилителя 12 мощности воздей2g ствует на привод 13, который изменяет положение заслонки 15 относительно сопл 14, изменяя равенство исходных течений, при которых выходное давление не изменяется. В зависимости от величины входного сигнала усилителя 12 мощности в ресивере 6, объекте
30 контроля 9 и полости датчика 7 давление будет изменяться либо в большую, либо в меньшую сторону, но всегда так, чтобы сигнал ошибки рассогласования системы регулирования, представляющий разность сигналов - заданного с помощью пульта 2 управления и измеренного, поступающего с датчика 7 давления, - выделенный на блоке 6 сравнения, равнялся нулю. В этом случае величина сигнала на выходе цифрового интегратора 10 остается неизменной, тем самым поддерживается ошибка системы регулирования, а следовательно, и равенство выходного и заданного значений давлений. С одной стороны применение цифрового интегратора в системе регулирования давления позволяет исключить возмущение воздействия при наличии массового расхода на выходе системы регулирования (негерметичность объекта контроля) и, следовательно, перерегулирование при подходе к заданному уровню давления как следствие интегрирования ошибки на входе цифрового интегратора 10. С другой стороны, замена дискретного метода (порционная система) регулирования аналоговым методом, заключающимся в дифференциальном регулировании пневмодросселей, позволяет уменьшить время регулирования (время перехода от одного к другому заданному значению давления) за счет исключения электропнев- моклапанов и увеличения скорости изменения давления за счет высокой собственной
40
45
50
55
Выходной сигнал запоминающего регистра для каждого такта определяется как Y(nT)X(nT)+Y(n-l)T,
где Т - период импульсов генерато- 5ра 21;
Y(nT) - выходной код в п-м такте; Х(пТ) - входной код в п-м такте; Y(n-)T- выходной код в (и- 1)-м такте.
0 Цифровой интегратор 10 интегрирует сигнал ошибки во времени. Выходной сигнал цифрового интегратора 10 после преобразования в аналоговый сигнал цифроаналого- вым преобразователем 11 усиливается уси5 лителем 12 мощности, выходной сигнал которого является управляющим сигналом привода 13. Второй вход усилителя 12 мощности позволяет вычислителю 1 управлять значением коэффициента усиления усилителя 12 мощности, компенсируя тем самым
0 изменение коэффициента усиления системы
5
регулирования по диапазону регулируемых давлений, что обеспечивает устойчивость и качество регулирования системы. Выходной сигнал усилителя 12 мощности воздейg ствует на привод 13, который изменяет положение заслонки 15 относительно сопл 14, изменяя равенство исходных течений, при которых выходное давление не изменяется. В зависимости от величины входного сигнала усилителя 12 мощности в ресивере 6, объекте
0 контроля 9 и полости датчика 7 давление будет изменяться либо в большую, либо в меньшую сторону, но всегда так, чтобы сигнал ошибки рассогласования системы регулирования, представляющий разность сигналов - заданного с помощью пульта 2 управления и измеренного, поступающего с датчика 7 давления, - выделенный на блоке 6 сравнения, равнялся нулю. В этом случае величина сигнала на выходе цифрового интегратора 10 остается неизменной, тем самым поддерживается ошибка системы регулирования, а следовательно, и равенство выходного и заданного значений давлений. С одной стороны применение цифрового интегратора в системе регулирования давления позволяет исключить возмущение воздействия при наличии массового расхода на выходе системы регулирования (негерметичность объекта контроля) и, следовательно, перерегулирование при подходе к заданному уровню давления как следствие интегрирования ошибки на входе цифрового интегратора 10. С другой стороны, замена дискретного метода (порционная система) регулирования аналоговым методом, заключающимся в дифференциальном регулировании пневмодросселей, позволяет уменьшить время регулирования (время перехода от одного к другому заданному значению давления) за счет исключения электропнев- моклапанов и увеличения скорости изменения давления за счет высокой собственной
0
5
0
5
частоты пневмодросселей. Увеличение быстродействия повышает точность задания и поддержания давления, а замена дискретного метода регулировании аналоговым упрощает схему и конструкцию устройства.
Формула изобретения
1. Устройство для задания и автоматической стабилизации давления, содержащее источники избыточного и вакуумметриче- ского давлений, связанные с соответствующими пневмодросселями, ресивер с установленным на нем датчиком давления, пневматически связанный с объектом контроля, усилитель мощности, привод и вычислитель, соединенный двунаправленными линиями связи с пультом управления и индикатором через первый интерфейс и с первым входом блока сравнения, а выход датчика давления через второй интерфейс подключен к второму входу блока сравнения i. к вычислителю, отличающееся тем, что, с целью увеличения быстродействия, повышения точности задания давления и упрощения, в него введены
последовательно соединенные цифровой интегратор, подключенный группой входов к соответствующим выходам блока сравнения, и цифроаналоговый преобразователь,
подключенный выходом к сигнальному входу усилителя мощности, который соединен группой управляющих входов с соответствующими выходами вычислителя, а выходом с управляющим входом привода заслонки пневмодросселей, выполненных в виде двух
встречно расположенных сопл с заслонкой между ними, причем межсопловая камера двух пневмодросселей связана с ресивером
2. Устройство по п. 1, отличающееся тем, что цифровой интегратор содержит генератор импульсов и последовательно соединенные сумматор и запоминающий регистр, тактовый вход которого соединен с выходом генератора импульсов, а группа выходов - с первой группой входов сумматора, причем 0 вторая группа входов сумматора является группой входов блока, а группа выходов запоминающего регистра является группой выходов блока.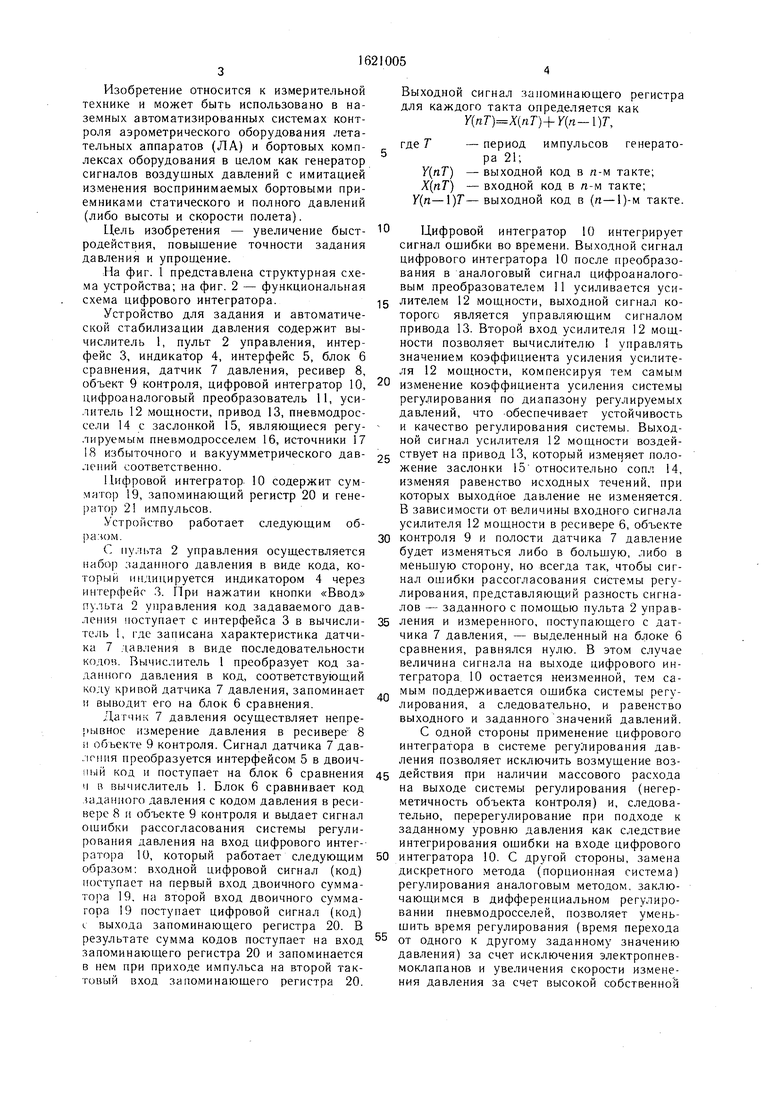
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания и автоматической стабилизации давления | 1985 |
|
SU1275394A1 |
| ДВУХКАНАЛЬНЫЙ ЗАДАТЧИК ДАВЛЕНИЯ | 1990 |
|
RU2015529C1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1983 |
|
SU1231608A1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| Устройство для автоматического задания и стабилизации давления | 1988 |
|
SU1550496A1 |
| ИЗМЕРИТЕЛЬ ДИСБАЛАНСА | 1992 |
|
RU2030724C1 |
| Система автоматического управления строительно-дорожными и землеройно-транспортными машинами | 1991 |
|
SU1813144A3 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057309C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057310C1 |
| Информационно-управляющая система центрального теплового пункта жилых общественных и промышленных зданий | 1987 |
|
SU1511751A1 |
Изобретение относится к измерительной технике и предназначено для использования в наземных автоматизированных системах контроля аэрометрического оборудования и бортовых комплексах летательных аппаратов. В устройстве, содержащем вычислитель 1, пульт 2 управления, интерфейсы 3, 5, индикатор 4, блок 6 сравнения , датчик 7 давления, ресивер 8, объект 9 контроля, сигнал блока 6 сравнения через цифровой интегратор 10, цифроаналоговый преобразователь 11, усилитель 12 мощности подается на пневмопривод 13, который изменяет межсопловое расстояние пневмодрос- селей 14, выполненных в виде двух встречно расположенных сопл с заслонкой 15 между ними. Этим достигается увеличение бустро- действия и точности задания и поддержания давления и упрощение конструкции устройства. 1 з. п. ф-лы, 2 ил.
Рие.2
| Программный задатчик давления | 1982 |
|
SU1059546A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для задания и автоматической стабилизации давления | 1985 |
|
SU1275394A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
