Изобретение относится к технике телевидения и может быть использовано в системах измерения координат подвижных объектов.
Цель изобретения - повышение точности измерения путем уменьшения динамических ошибок.
На фиг. 1 приведена электрическая структурная схема предлагаемого измерителя координат подвижных объектов; на фиг. 2 - диаграмма, поясняющая его работу; на фиг. 3 - электрическая структурная схема формирователя сигнала ошибки; на фиг. 4 - структурная схема синхрогенератора; на фиг. 5 - то же, вычислителя коэффициентов экстраполяции; на фиг. 6 - то же, блока экстраполяции; на фиг. 7 - временные диаграммы, поясняющие их работу.
Измеритель координат подвижных объектов (см. фиг. 1) содержит фотоэлектронный преобразователь (ФЭП) 1, видеоусилитель 2, аналого-цифровой преобразователь (АЦП) 3, синхрогенератор 4, формирователь 5 локальной развертки, ключ 6, формирователь 7 сигнала управления, канал 8 измерений координаты Х и канал 9 измерений координаты Y, каждый из которых содержит первый сумматор 10, масштабирующий блок 11, формирователь 12 импульса привязки, блок 13 экстраполяции, регистр 14 сдвига, вычислитель 15 коэффициентов экстраполяции, счетчик 16, формирователь 17 сигнала ошибки, цифровой интегратор 18, второй сумматор 19, цифроаналоговый преобразователь 20.
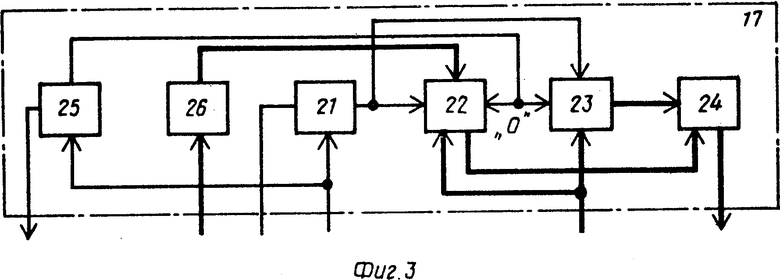
Формирователь 17 сигнала ошибки (см. фиг. 3) содержит элемент И 21, цифровой дискриминатор 22, цифровой интегратор 23, блок 24 деления, формирователь 25 импульса записи и формирователь 26 опорного сигнала.
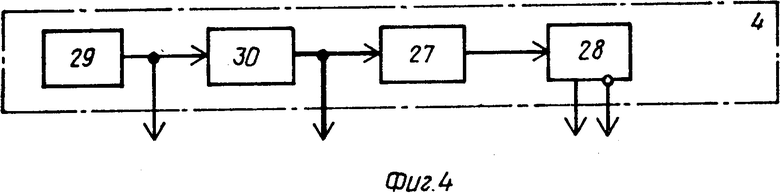
Синхрогенератор 4 (см. фиг. 4) содержит дешифратор 27 кода, триггер 28, генератор 29 тактовых импульсов (ГТИ) и счетчик 30.
Вычислитель 15 коэффициентов экстраполяции (см. фиг. 5) содержит сумматор 31,32, блок 33 деления, регистры 34-39 памяти кодов, умножители 40-42, сумматоры 43,44, блок 45 деления, умножители 46-49, сумматоры 50,51, регистры 52-54 памяти кодов, блок 55 деления, регистр 56 памяти кода и умножителя 57,58.
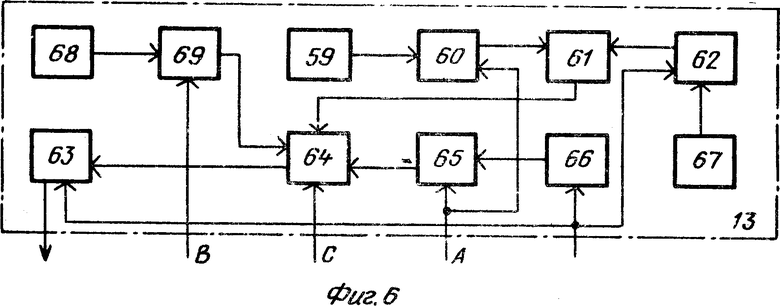
Блок 13 экстраполяции (см. фиг. 6) содержит регистры 59 памяти кода, умножители 60,61, сумматор 62, умножитель 63, сумматор 64, умножитель 65, квадратор 66, регистр 67 памяти кода, регистр 68 памяти кода и умножитель 69.
Измеритель координат подвижных объектов работает следующим образом.
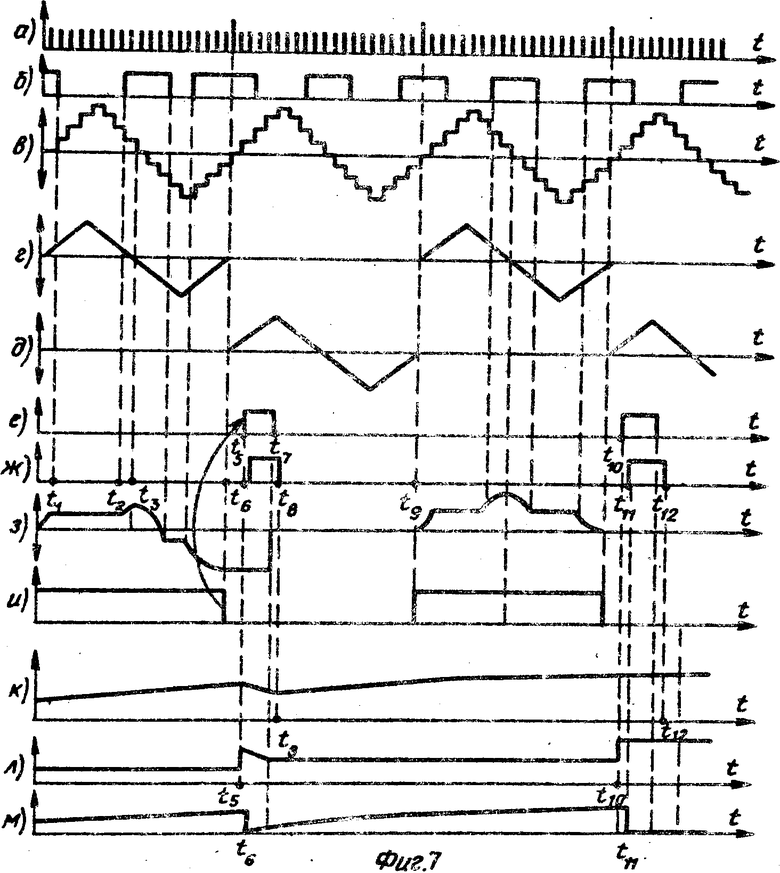
Его работу в режиме слежения рассмотрим применительно к системам с диссекторным датчиком и крестообразной разверткой изображения объекта. Траектория сканирования задается выходными сигналами формирователя 5, которые поступают в отклоняющие катушки ФЭП 1. Считывание внесенного в ячейки памяти формирователя 5 сигнала, задающего траекторию развертки, обеспечивается текущим адресом на выходе синхрогенератора 4. Видеосигнал (см. фиг. 7, б) с выхода АЦП 3 поступает в формирователь 17 сигнала ошибки каналов 8,9. Ошибки рассогласования цикла сканирования qx, qy, сформированные по результатам анализа временного положения видеосигнала относительно опорного сигнала (синхронного с траекторией развертки (см. фиг. 7 г, д), по импульсу синхронизации (после переключения каналов 8,9) записываются в цифровые интеграторы 18. Одновременно с ошибками рассогласования qx, qy в цифровые интеграторы 18 (см. фиг. 7, л) вносятся экстраполируемые приращения Δx , Δy с выхода масштабирующего блока 11, имеющего коэффициент передачи 1/Kп, где Кп - крутизна преобразования цифрового интегратора 18. После фиксации значения Δx ( Δy ) передний фронт импульса привязки на выходе формирователя 12 (см. фиг. 7, ж), задержанный (на один такт) относительно входного сигнала, производит начальную (нулевую) установку счетчика 16. Задним фронтом импульса привязки обеспечивается запись в регистр 14 текущей координаты объекта Sэк (Sэк = Sэ + qx), что поясняется эпюрами фиг. 7, ж, к, м на временном интервале t6-t8.
Экстраполяция координат Sэ решается на основе четырехточечной аппроксимации траектории движения объекта, описываемой полиномом Sэ = A˙p3 + B˙p2 + C˙p + D. Коэффициенты полинома вычисляются в вычислителях 15 из соотношений
D = Si;
A =  (S4 - 3S3 + 3S2 - D);
(S4 - 3S3 + 3S2 - D);
B =  (- S4 + 4S3 - 5S2 + 2D);
(- S4 + 4S3 - 5S2 + 2D);
C =  (2˙S4 - 9˙S3 + 18S2 - 11˙D)
(2˙S4 - 9˙S3 + 18S2 - 11˙D)
Вычисление коэффициентов экстраполяции A, B и С производится в начале каждого шага Н дискретизации. Временной интервал задается выходным входом nt счетчика 16 (nt ≥ 0), на вход которого поступают тактовые импульсы (fт.и. = 2Fлр˙Z), где Fлр - частота локальной развертки; Z - величина дискретизации 0,5 цикла) с выхода синхрогенератора 4. Экстраполяционное приращение координат ( Δx , Δy) обеспечивается соответствующими блоками 13, реализующих, например для канала 8, соотношение
Δx = nt˙(B ˙(2˙M + 1) + 3˙A˙M˙(M + nt) + +Ant2 + C), полученного из условия Δx = Sэ - S4. Инвариантность шага Н к частоте локальной развертки Fлр обеспечивается условием, при котором Н = Zц, где Zц - величина дискретизации цикла развертки (для рассматриваемой реализации Zц = 2: Z). Экстраполяционное измерение координат объекта обеспечивается реализацией уравнения S (qi+
(qi+ )+
)+ , где Sэp+1 - предсказанная координата на шаге р+1, вычисленная на шаге p;
, где Sэp+1 - предсказанная координата на шаге р+1, вычисленная на шаге p;
qp = Sэрк - Sэр - вычисленная ошибка экстраполяции на шаге p;
Δэp = Sэp - Sэp+1к - экстраполяционное приращение на шаге p, вычисленное на шаге p-1; Sэpк - вычисленная координата на шаге p.
Структура формирователя 17 сигнала ошибки применительно к системе с крестообразной разверткой (см. фиг. 3) формирует ошибку рассогласования, инвариантную к изменению размера и яркости изображения объекта. Синхронно с траекторией развертки на выходе формирователя 26 опорного сигнала вырабатывается пилообразное напряжение (см. фиг. 7, в), которое в цифровом дискриминаторе 22 перемножается с текущим уровнем видеосигнала на выходе АЦП 3. Результат свертки накапливается в цифровом интеграторе, входящем в состав цифрового дискриминатора 22 ( xi·bi, где xi - текущее значение видеосигнала; bi - текущее значение весовой функции). Одновременно в цифровом интеграторе 23 происходит формирование величины
xi·bi, где xi - текущее значение видеосигнала; bi - текущее значение весовой функции). Одновременно в цифровом интеграторе 23 происходит формирование величины  xi пропорциональной площади текущего сечения изображения объекта. Временной интервал интегрирования задается тактовыми импульсами на выходе элемента И 21. При переключении каналов 8,9 на выходах формирователя 25 формируются импульсы, обеспечивающие запись "Сброс" цифрового дискриминатора 22 (см. фиг. 7з) и цифрового интегратора 23. Выходная величина qx= Σ xi-bi/Σ xi (см. фиг. 7е) формируется на выходе блока 24 деления. Если запись qx производится одним тактовым импульсом, то формирователь 25 может иметь один выход: передним фронтом импульса будет произведена запись qx, а задним фронтом - начальная установка цифрового дискриминатора 22 и цифрового интегратора 23. Коммутация каналов 8,9 производится триггером 28 (см. фиг. 7и).
xi пропорциональной площади текущего сечения изображения объекта. Временной интервал интегрирования задается тактовыми импульсами на выходе элемента И 21. При переключении каналов 8,9 на выходах формирователя 25 формируются импульсы, обеспечивающие запись "Сброс" цифрового дискриминатора 22 (см. фиг. 7з) и цифрового интегратора 23. Выходная величина qx= Σ xi-bi/Σ xi (см. фиг. 7е) формируется на выходе блока 24 деления. Если запись qx производится одним тактовым импульсом, то формирователь 25 может иметь один выход: передним фронтом импульса будет произведена запись qx, а задним фронтом - начальная установка цифрового дискриминатора 22 и цифрового интегратора 23. Коммутация каналов 8,9 производится триггером 28 (см. фиг. 7и).
Вычислитель 15 коэффициентов экстраполяции (см. фиг. 5) реализует приведенные выражения для A, B и С. В тех случаях, когда нет априорной информации о траектории движения объекта, режим экстраполяции координат не реализуется. Последнее обеспечивается формирователем 7 и ключом 6. Тактовые импульсы с выхода синхрогенератора 4 (см. фиг. 7, а) проходят на входы счетчиков 16 через ключ 6 лишь при наличии разрешающего сигнала с выхода формирователя 7, связанного с выходом синхрогенератора 4 и выполненного в виде последовательно соединенных элемента И, счетчика и дешифратора кода Q, выход которого соединен с вторым выходом элемента И. В начальном состоянии на выходе дешифратора кода Q устанавливается потенциал, разрешающий прохождение импульсов цикла на вход формирователя 7 и накладывающий запрет на прохождение импульсов через ключ 6. Как только на выходе счетчика формирователя 7 установится код числа Q, то на выходе дешифратора появится сигнал запрета на изменение состояния счетчика формирователя 7 и разрешение на прохождение тактовых импульсов через ключ 6. (56) Авторское свидетельство СССР N 759034, кл. H 04 N 7/18, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1984 |
|
SU1238702A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1986 |
|
SU1412577A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕЧНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1493074A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ИЗОБРАЖЕНИЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 1989 |
|
SU1657043A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1986 |
|
SU1443763A1 |


Изобретение относится к технике телевидения. Цель изобретения - повышение точности измерений. Измеритель содержит фотоэлектронный преобразователь 1, видеоусилитель 2, АЦП 3, синхрогенератор 4, формирователь (Ф) 5 локальной развертки, ключ 6, Ф 7 сигнала управления и каналы 8 и 9 измерений координат X и Y, каждая из которых состоит из сумматоров 10 и 19, масштабирующего блока 11, Ф 12 импульсов привязки, блока 13 экстраполяции, регистра 14 сдвига, вычислителя 15 коэффициента экстраполяции, счетчика 16, Ф 17 сигнала ошибки, цифрового интегратора 18 и ЦАП 20. Цель достигается путем уменьшения динамических ошибок, что обеспечивается за счет введения ключа 6 и формирователя 7, а также выполнением каналов 8 и 9. Даны иллюстрации выполнения синхрогенератора 4, блока 13 экстраполяции, вычислителя 15 и Ф 17. 7 ил.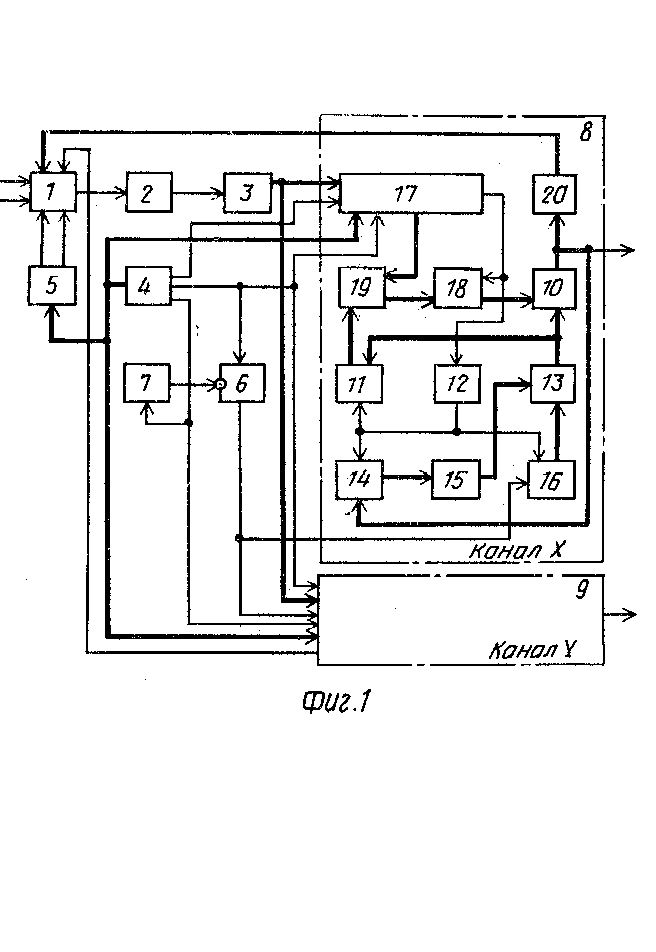
ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ , содеpжащий последовательно соединенные фотоэлектpонный пpеобpазователь, видеоусилитель и аналого-цифpовой пpеобpазователь, синхpогенеpатоp, фоpмиpователь локальной pазвеpтки, вход котоpого соединен с пеpвым выходом синхpогенеpатоpа, а пеpвый и втоpой выходы соединены соответственно с пеpвым и втоpым упpавляющими входами фотоэлектpонного пpеобpазователя, а также идентичные каналы измеpения кооpдинаты X и кооpдинаты Y , содеpжащие счетчик и пеpвый сумматоp, отличающийся тем, что, с целью повышения точности измеpения путем уменьшения динамических ошибок, в него введены последовательно соединенные фоpмиpователь сигнала упpавления, вход котоpого соединен с втоpым выходом синхpогенеpатоpа, и ключ, сигнальный вход котоpого соединен с тpетьим выходом синхpогенеpатоpа, а в каждый из каналов измеpения кооpдинаты X и кооpдинаты Y последовательно соединенные pегистp сдвига, вход котоpого соединен с выходом пеpвого сумматоpа, вычислитель коэффициентов экстpаполяции, дpугой вход котоpого соединен с выходом счетчика, масштабиpующий блок, втоpой сумматоp и цифpовой интегpатоp, выход котоpого соединен с пеpвым входом пеpвого сумматоpа, втоpой вход котоpого соединен с выходом блока экстpаполяции, цифpо-аналоговый пpеобpазователь, вход котоpого соединен с выходом пеpвого сумматоpа, а выход соединен с соответствующим упpавляющим входом фотоэлектpонного пpеобpазователя, фоpмиpователь импульса пpивязки, выход котоpого соединен с упpавляющими входами pегистpа сдвига, счетчика и масштабиpующего блока, а также фоpмиpователь сигнала ошибки, пеpвый выход котоpого соединен с входом фоpмиpователя импульса пpивязки и с упpавляющим входом цифpового интегpатоpа, втоpой выход соединен с втоpым входом втоpого сумматоpа, пpи этом пеpвый, тpетий и четвеpтый выходы синхpогенеpатоpа соединены соответственно с пеpвым, втоpым и тpетьим входами фоpмиpователя сигнала ошибки, четвеpтый вход котоpого соединен с выходом аналого-цифpового пpеобpазователя, а выход ключа соединен с сигнальным входом счетчика.
