Изобретение относится к устройствам для определения прочностных характеристик грунтов при инженерных изысканиях в строительстве.
Цель изобретения - повышение точности и производительности испытаний за счет автоматического регулирования травления троса молота.
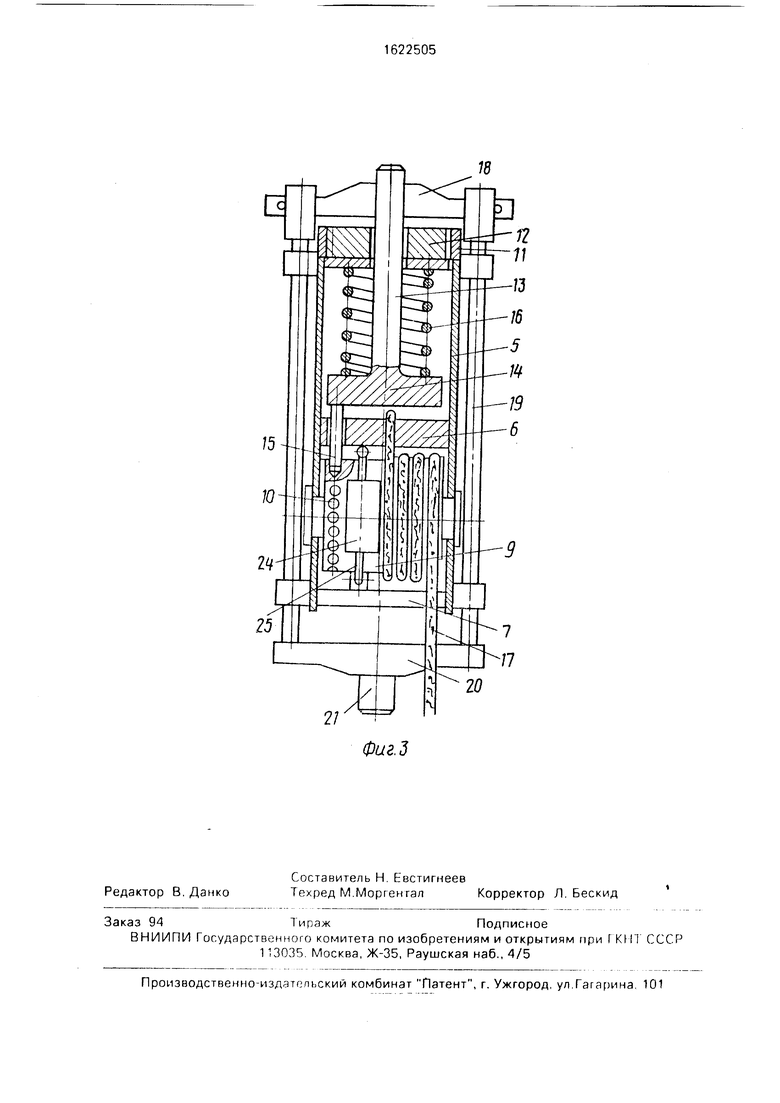
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - механизм подьема молота, общий вид; на фиг. 3 - механизм подьема молота, вид спереди.
Устройство содержит опорную раму 1 с мачтой 2, на которой на неподвижной оси 3
установлен бэйансир выполненный из двух параллельных пластин 5, соединенных межцу собой распорками 6 8
На одном конце плсia балансира установлен свободно вращающийся барабан 9 с радиальными гнездами 10 на его ободе В верхней части пластин 5 закреплена гайка 11. соединенная резьбой с диском 12, через центральное отверстие которого пропущен шток 13 с прижимной головкой 14. на которой с возможностью взаимодействия с гнездами 10 установлен фиксатор в виде пальца 15.
Между диском 12 и прижимной юло- вкой 14 установлена пружина 16 ОПРСПРЧИвающая прижим троса 17 к распорке 6. Ш ток 13 своей верхней частью закреплен на верхней балке 18, соединенной штырями 19 с нижней балкой 20, на которой закреплен боек 21.
На мачте 2 с возможностью взаимодействия с бойком 21 установлен регулируемый по высоте упор 22. Соединенные штырями 19 балки 18 и 20 составляют обойму, установленную в направляющих23с возможностью продольного перемещения.
Барабан 9 охвачен фрикционными колодками 24, установленными на стержнях 25, шарнирно закрепленных на распорке 7 и соединенных между собой тягой 26 с пружиной 27. Регулировкой пружины 27 обеспечивается тормозной момент от сил трения колодок 24, который должен бить меньше крутящего момента, создаваемого на барабане весом захвата молота.
Трос 17 намотан на барабан лебедки 28, пропущен через отклоняющий ролик 29 и двумя-тремя витками охватывает обод барабана 9.
В комплект устройства входит зонд с колонной штанг и наковальней, молот, захват молота и механизм сбрасывания молота (не показан). Захват молота закреплен на свободном конце троса 17. В качестве привода балансира используется кривошипно- шатунный механизм 30, установленный на опорной раме.
Устройство работает следующим образом.
Посредством кривошипно-шатунного механизма 30 осуществляется качание балансира 4 вокруг оси 3. Вместе с балансиром качается закрепленный на нем трос 17, свободный конец которого с захватом молота совершает возвратно-поступательное движение по вертикали.
В крайнем нижнем положении плеча балансира захват взаимодействует с мблотом и при дальнейшем его движении вверх поднимает молот в исходное положение. В момент достижения плечом балансира крайнего верхнего положения осуществляется автоматическое сбрасывание молота, который падает на наковальню штанги зонда, внедряя его в исследуемый грунт.
Пройдя крайнее верхнее положение, плечо балансира вместе с тросом и захватом молота опускается вниз. При приближении его к крайнему нижнему положению боек21 ударится оупор22. При этом обойма вместе с подпружиненным штоком 13 переместится по направляющим 23 вверх, палеи, 15 фиксатора выйдет из взаимодействия с гнездом 10 барабана 9, а прижимная головка 14 освободит трос 17. В результате трос
и барабан окажутся расторможенными. Независимо от движения балансира под действием веса захвата молота трос 17 будет опускаться на свободно вращающемся барабане 9 до момента взаимодействия захва0 та с молотом. В этот момент фрикционные колодки 24 под действием пружины 27 остановят вращение барабана 9 и дальнейший спуск троса 17.
При выходе плеча балансира из крайне5 го нижнего положения боек 21 выйдет из взаимодействия с упором 22, в результате чего под действием подпружиненной прижимной головки 14 с фиксатором произойдет стопорение барабана 9 с тросом 17 и
0 начнется подъем молота в исходное положение. Цикл повторится.
Автоматическое регулирование травления троса молота в процессе динамического зондирования грунта позволит повысить
5 точность и производительность испытаний.
Формула изобретения Устройство для динамического зондирования грунта, включающее опорную раму
0 с мачтой и анкерующими приспособлениями, зонд со штангами, молот, механизм подъема молота с приводом и трособлочной системой, отличающееся тем, что, с целью повышения точности и производи5 тельности испытаний за счет автоматического регулирования травления троса молота, механизм подъема молота выполнен в виде балансира с кривошипно-шатун- ным механизмом, при этом балансир
0 снабжен установленной на его свободном конце обоймой в виде двух балок, соединенных штырями, подпружиненным штоком и вращающимся барабаном, взаимодействующим с тросом, вращающийся барабан
5 снабжен фрикционным тормозом и выполнен с радиальными гнездами на ободе, один конец подпружиненного штока снабжен прижимной головкой с фиксатором в виде пальца, установленного с возможностью
0 взаимодействия с радиальными гнездами на ободе барабана, другой конец закреплен на верхней балке обоймы, а на нижней балке обоймы установлен боек, причем на опорной раме с возможностью взаимодействия
5 с бойком закреплен регулируемый по высоте упор.
77,
Ю
/// //s ///

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЯ МЕЛЮЩИХ ШАРОВ НА УДАРНУЮ СТОЙКОСТЬ | 2020 |
|
RU2759709C1 |
| СПОСОБ ЛАБОРАТОРНОГО ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНОЙ ПЛОТНОСТИ ГРУНТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328718C2 |
| Устройство для динамического зондирования грунтов | 1989 |
|
SU1675487A1 |
| УСТАНОВКА ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1991 |
|
RU2017641C1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1996 |
|
RU2106246C1 |
| Молот для изготовления профилей переменного сечения | 1946 |
|
SU68584A2 |
| Ударное устройство | 1980 |
|
SU880684A2 |
| Устройство для определения твердости пород в скважинах | 1988 |
|
SU1513144A1 |
| Устройство захватной балки для подъема и опускания шандорных затворов в гидротехнических сооружениях | 1929 |
|
SU14799A1 |
| Устройство для клеймения | 1980 |
|
SU897369A1 |


Изобретение относится к устройствам для определения прочностных характери стик грунтов при инженерных изысканиях в строительстве Целью изобретения является повышение точности и производительности испытаний за счет автоматического регулирования травления троса MO ioin Устройство содержит опорную раму с мачтой и анкерующим приспособлением, зонд со штангами и наковальней моют, механизм подъема молота с приводом и трособлочной системой Механизм подъема мопота включает балансир с криьошипно шатунным механизмом на свободном онце которого установлены обойма в р r-r л f/тпок соединенных ШТЫРЯМИ, ПОДПру ИЧеННЬ й ШТОК и вращающийся барабян с фрнкиионним тормозом и радияльны и гi)p ir Tni на оГп- де Один конец подпружиненною гпеьт снабжен при «имнои го ю us с ) m с тором в виде пальца, другой закргппеч на верхней балке обоймы балка оПеймч снль- жсна бойком та 1мо,г й( тм i, ji / л и руемим по F г о т е упором установленным на опопнгч, рлмр 3 ил № С
Фиг.1
7 ч и о
#
5
fl/
3093291
Фиг.З
| Бондарик Г.К Динамическое и статическое зондирование в инженерной теологии М Недра, 1964, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| и Воробков Л Н Полевые методы исследования строительных свойств грунтов | |||
| М.: Стройиздат, 1981, с 136, рис | |||
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
