Изобретение относится к области машиностроения, в частности к средствам пневмоавтоматики, и может быть использовано в приводах промышленных роботов и манипуляторов.
Цель изобретения - повышение быстродействия и точности позиционирования.
На чертеже представлена функциональная схема механизма.
Пневматический исполнительный меха- низм содержит пневмоцилиндр 1 с установленным в нем с образованием рабочих полостей 2 и 3 поршнем 4 со штоком 5, электроуправляемое уплотнение, включающее основную 6 и дополнительную 7 обмот- ки возбуждения и ферромагнитную жидкость 8. заполняющую зазор 9 между цилиндром 1 и поршнем 4, при этом цилиндр 1 и поршень 4 со штоком 5 выполнены из ферромагнитного материала. Поршень4 выпол- пен с неферромагнитной перегородкой 10, разделяющей его на две секции 11 и 12, а по обе стороны перегородки 10 выполнены кольцевые пазы 13 и 14, в которых установлены основная и дополнительная обмотки 6 и 7 возбуждения, гальванически не связанные между собой. В перегородке 10 выпол- нены каналы 15 и 16 для сообщения кольцевых пазов 13 и 14 с атмосферой. Рабочие полости 2 и 3 связаны с источником
17давления через пневмораспределитель
18и обратные клапаны 19 и 20. Шток 5 сочленен с датчиком 21 обратной связи (перемещения, скорости) и электротормозом 22.
Механизм работает следующим образом.
При подаче управляющего напряжения в обмотки 6 или 7 ферромагнитная жидкость 8 втягивается в область максимальной маг- нитной индукции, условно представленной на чертеже в виде двух магнитных силовых линий В, заполняя зазор 9, образуя тем самым управляемое магнитно-жидкостное уплотнение с предельным перепадом давле- ния, пропорциональным управляющему напряжению. При поступлении рабочей среды от источника 17 давления в рабочих полостях 2 и 3 происходит перепуск рабочей среды через ферромагнитную жидкость 8 так, что между рабочими полостями 2 и 3 устанавливается перепад давления, пропорциональный управляющему напряжению, при этом плавное изменение последнего приводит к плавному изменению силы, действующей на шток 5.
Допустим, по команде программно-логического блока (совместно с системой управления условно не показаны) отключается электротормоз 22, а рабочая среда от
источника 17 давления через пневмораспределитель 18 и обратный клапан 19 поступает в рабочую полость 2 пневмоцилиндра 1. Для быстрого разгона поршня 4 дается команда на подключение обмотки 6 возбуждения на номинальное управляющее напряжение и отключение от источника управляющего напряжения (не показан) обмотки 7 возбуждения, т.е. кольцевой зазор 9 между пневмоцилиндром 1 и секцией 11 поршня 4 полностью закрыт магнитно-жидкостным уплотнением, а кольцевой зазор 9 между пневмоцилиндром 1 и секцией 12 поршня 4 полностью открыт. При этом рабочая среда из рабочей полости 3 пневмоцилиндра 1 через открытый зазор 9, каналы 15 и 16 выходит в атмосферу, а поршень 4 усиленно разгоняется.
Далее дается команда на подключение обмотки 7 возбуждения на номинальное управляющее напряжение, т.е. оба зазора 9 между пневмоцилиндром 1 и секциями 11 и 12 поршня 4 закрыты, а установившаяся скорость перемещения поршня 4 и штока 5 определяется тем значением, которое было получено в момент равенства давлений воздуха в рабочих полостях 2 и 3.
При отклонении скорости перемещения штока 5 в ту или иную сторону от установившегося значения программно-логический блок по сигналу датчика 21 обратной связи (скорости) дает команду на уменьшение величины тока, протекающего по соответствующей обмотке 6 или 7 возбуждения. Если скорость перемещения уменьшилась, то ток уменьшается только в обмотке 7 возбуждения. Если же скорость увеличилась, то ток уменьшается только в обмотке б возбуждения, Следовательно, имеется возможность плавного регулирования скорости перемещения штока 5 в широком диапазоне.
При подходе к точке позиционирования программно-логический блок по сигналу датчика 21 обратной связи (перемещения) дает команду на уменьшение тока, протекающего через обмотку б возбуждения, а затем и ее полное отключение от источника управляющего напряжения, т.е. кольцевой зазор 9 между пневмоцилиндром 1 и секцией 11 поршня 4 плавно открывается, а кольцевой зазор 9 между пневмоцилиндром 1 и секцией 12 полностью закрыт. При этом рабочая среда из рабочей полости 2 через открытый зазор 9, каналы 15 и 16 выходит в атмосферу. Начинается процесс торможения. Поршень 4 со штоком 5 переходят на так называемую ползучую скорость перемещения, а при подходе штока 5 к заданной точке позиционирования программно-логический блок по сигналу датчика 21 обратной
связи (перемещения) дает команду на увеличение тока, протекающего через обмотку 6 возбуждения, а также и подключение ее на номинальное управляющее напряжение. Зазоры 9 между внутренней поверхностью пневмоцилиндра 1 и секциями 11 и 12 поршня 4 при этом будут закрыты и обе рабочие полости б и 7 не связаны с атмосферой.
Поршень 4 со штохом 5 останавливаются в заданной точче позиционирования и одновременно с этим последний фиксируется в ней электротормоэом 22, который срабатывает по команде программно-логического блока.
Работа исполнительного механизма при перемещении в обратном направлении происходит аналогично при соответствующем состоянии обмоток 6 и 7 и полостей 2 иЗ.
Таким образом, имеет место расшире- ние функциональных возможностей и улучшение динамических характеристик за счет быстрого и точного позиционирования поршня 4 со штоком 0 в любой точке перемещения.
Формула изобретения
Пневматический исполнительный механизм, содержащий пневмоцилиндр с установленным в нем с образованием рабочих полостей поршнем со штоком, элекгроуп- равляемое уплотнение поршня, включающее обмотку возбуждения и ферромагнитную жидкость, заполняющую зазор между цилиндром и поршнем, при этом цилиндр и поршень со штоком выполнены из ферромагнитного материала, отличающийся тем. что, с целью повышения быстродействия и точности позиционирования, цилиндр снабжен дополнительной обмоткой возбуждения, поршень выполнен с неферромяг- нитной перегородкой, разделяющей его на две секции, а по обе стог ны перегородки выполнены кольцевые пазы, в который установлены основная и дополнительная гальванически не связанные обмотки возбуждения, при этом в перегородке выполнелы каналы для сообщения кольцевых пазов между собой и с атмосферой.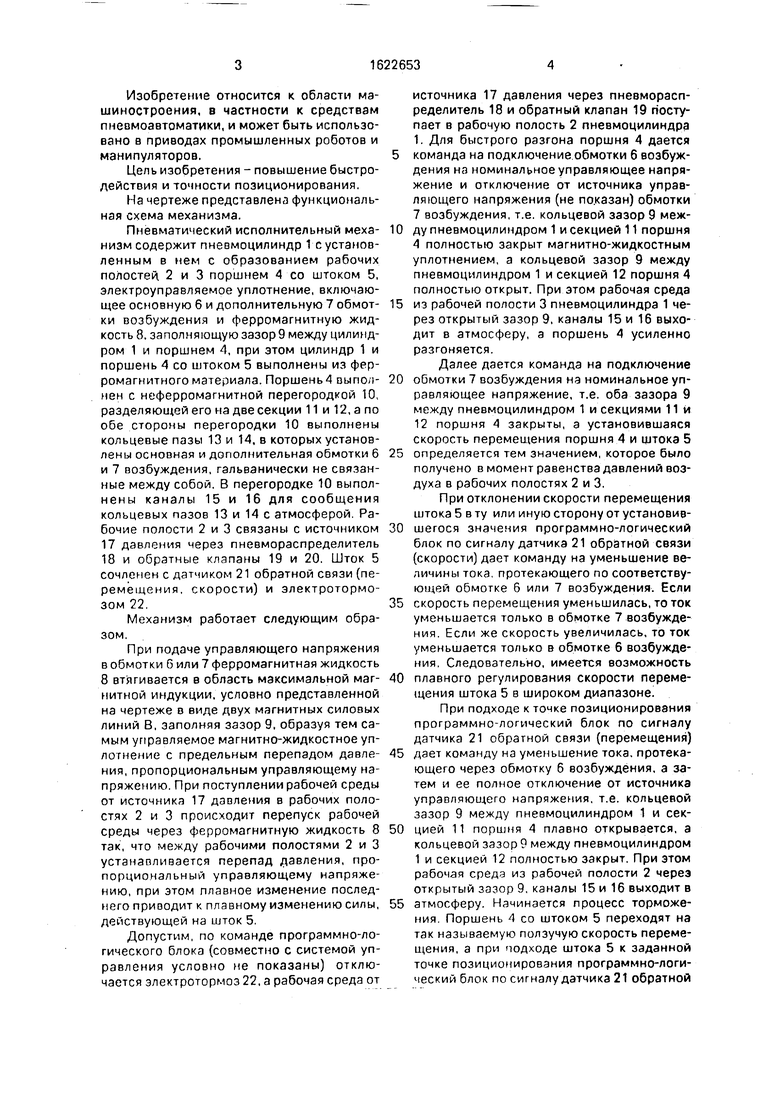
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИЛОВЫМ ЭЛЕМЕНТОМ ТРЕНАЖЕРА | 1992 |
|
RU2081643C1 |
| БЕСШТОКОВЫЙ ПРИВОД | 1991 |
|
RU2054133C1 |
| Пневмогидравлический дозатор | 1978 |
|
SU764932A1 |
| Компрессор на основе линейного двигателя | 2022 |
|
RU2792183C1 |
| Пневматический шаговый привод | 1989 |
|
SU1707294A2 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ПОДВИЖНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2426922C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОТЕЗОМ НИЖНЕЙ КОНЕЧНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032434C1 |
| ЯСС ГИДРОМЕХАНИЧЕСКИЙ | 1998 |
|
RU2145659C1 |
| Пневматический амортизатор | 1984 |
|
SU1178982A1 |
| ТРАНСПОРТАБЕЛЬНАЯ ТЕПЛОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ЖИЗНЕОБЕСПЕЧЕНИЯ ПОЛЕВЫХ ГОСПИТАЛЕЙ ПУСТЫНЦЕВА | 1995 |
|
RU2109156C1 |
Изобретение м.б. использовано в приводах промышленных роботов и манипуляторов. Цель изобретения - повышение быстродействия и точности позиционирования. Пневматический исполнительный механизм содержит пневмоцилиндр 1 с рабочими полостями 2 и 3 и поршнем 4 со штоком } выполненными из ферромагнитного материала. Поршень 4 разделен неферромагнитной перегородкой 10 на секции 11 и 12, а по обе стороны перегородки 10 выполнены кольцевые пазы 13 и 14, в которых устгчовлены обмотки 6 и 7 возбуждения, гальванически не свчзаы-ше между собой. Серромагнитная жидкость 8 заполняет за- зоо 9 между цилиндром 1 и поршнем 4. При подаче управляющего напряжения в обмотки 6 и 7 ферромагнитная жидкость 8 втягивается в обтасть максимальной магнитной индукции, заполняя зазор 9. образуя тем самым управляемое магнитно-жидкостное уплотнение. Плавное изменение управляющего напряжения приводит к плавному изменению силы, действующей на шток 5 впоть до его полной остановки. 1 ил. ё
| Пневматический амортизатор | 1984 |
|
SU1178982A1 |
| кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
