фиг
Изобретение относится к машиностроению, в частности к средствам пневмоавто- матики, может быть использовано в качестве исполнительного механизме промышленных роботов, станков с позиционной сис гемой программного управления и машин-автоматов, где требуется шаговое перемещение, и является усовершенствованием изобретения по авт.св. 1504379.
Целью изобретения является повышение точности позиционирования и тяговых усилий.
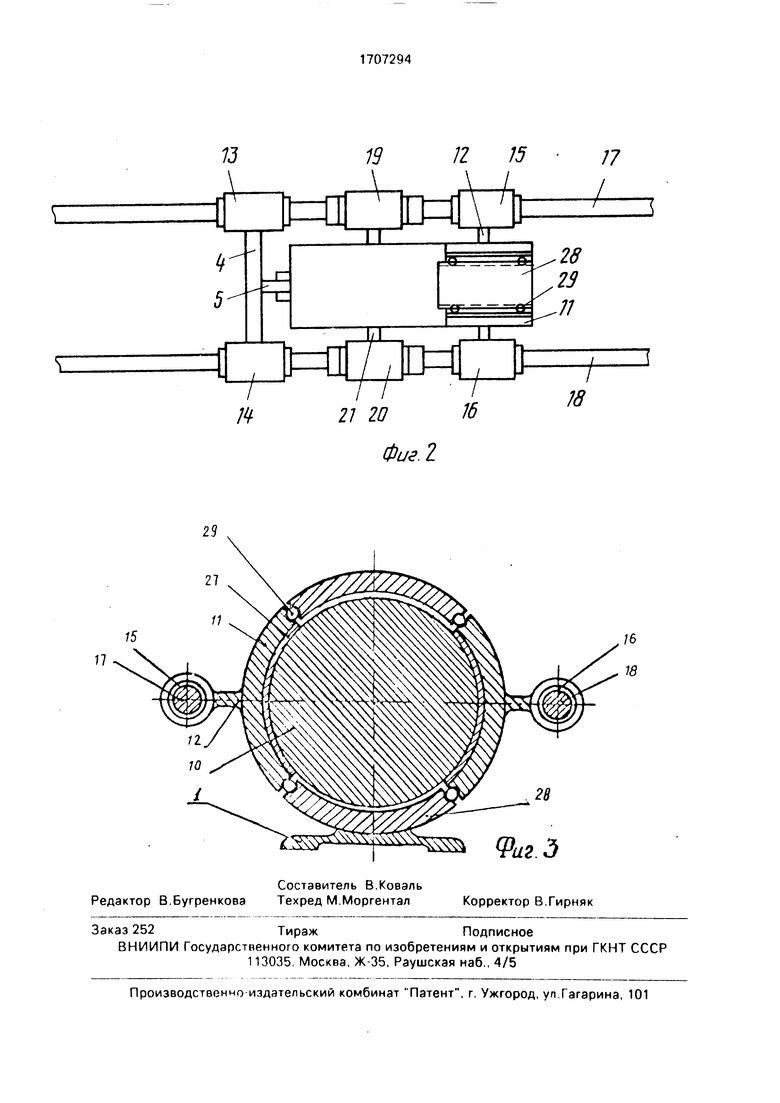
На фиг.1 представлен приьод с двумя выходами, продольный разрез; ни фиг.2 -то же. вид сверху; на фиг.З - разрез Л--Л на фиг.2.
Пневматический шаговый привод содержит (фиг.1 и 2) жестко прикрепленные к основанию 1 пневмоцилиндры 2, в каждом из которых установлен поршень 3, закрепленный с планкой 4, через тягу и два дисковые электромагнита, выполненные в виде магнитопроводов 6 и 7 с обмотками 8 и 9 возбуждения и общим якорем 10. С якорем 10 жестко связана (фиг.З) направляющая 11 посредством планки 12. На планках 4 и 12 установлены основные и дополнительные управляемые рабочие захваты 13-16, с помощью которых возвратно-поступательные движения поршня 3 и якоря 10, каждого из пневмоцилиндров 2 передается к двухсторонним штокам 17 и 18. Кроме того, привод снабжен управляемыми рабочими захватами 19 и 20, жестко связанными с корпусом 1 с помощью планки 21. Каждый из захватов 13, 14, 15, 19 и 20 выполнен в виде электромагнитных порошковых муфт (не показано).
В зависимости от требуемой точности позиционирования привода устанавливается зазор между магнитопроводами 6 и 7 и якорем 10. Рабочие полости 22 и 23 каждого из пневмоцилиндров 2 подключены через соответствующий пневмораспределитель 24 к магистрали 25 и 26 высокого и низкого давлений. Между якорем 10 и направляющей 11 установлены экранирующие втулки 27, которые служат для уменьшения рассеяния магнитного потока. Направляющая 11 свободно перемещается относительно корпуса 28 на шариках 29.
Привод работает следующим образом.
Устройство управления (ж; показано) вырабатывает управляющие сшнэлы для пневмораспределителей 24 обмоток Б и 9 возбуждения и захватов 13, 14, 15, 16 и 19, 20 в зависимости от величины хода перемещения X привода.
При этом с помощью пневмоцилиндроп 2 и захватов 13 и 14 осуществляется перемещение штоков 17 и 18 с шагом(5п. равным величине хода поршней 3, С помощью дисковых электромагнитов и захватов 15 и 16 осуществляется перемещение штоков 17 и
18с шагом дэ , равным величине хода якорей 10.
Устройство управления вычисляет количество шагов Мп для пневмоцилиндров 2 и количество шагов N3 для электромагнитов
по следующим выражениям
N,i INT
XN
5п,
ЗГ
5п
(-1 где INT - целая часть.
Привод вначале отрабатывает количество шагов Nn, далее N3. Возможны варианты, при которых привод совершает движения с
0 шагом 5Э в начале, в середине хода перемещений штоков и 18 в зависимости от требований, предъявляемых к приводу.
Такая необходимость возникает в тех случаях, когда требуется быстрое переме5 щение объекта до нужной точки и при дальнейшем перемещении его с малым шагом и с большим тяговым усилием.
Поясним принцип работы привода в случае, когда шток 17 перемещается влево
0 (по чертежу), совершая при этом движения вначале с шагом Nn и в конце с шагом N31, a шток 18 перемещается вправо с одинаковым шагом N32.
Устройство управления вычисляет коли5 чество шагов Nn и N3 по вышеприведенным соотношениям для обоих шгоков 17 и 19 в зависимости от величины их ходов Xi и Х2. Допустим в исходном положении поршень 3 находится в правом крайнем по чер0 тежу положении и якорь 10 находится так. же в правом притянутом к магнитопроводу 7 положении,
С помощью соответствующего пневмо- рчспределителя 29 полости 22 и 23 соединя5 иэтся с магистралями 25 и 26 таким образом, что поршень 3 совершает один шаг влево. Это движение передается к штоку 17 путем поочередного включения и отключения рабочих захватов 13 и 19 и шток 17 перемеща0 ется на один шаг влево, После этого пневмораспределитель 27 устанавливается э исходную позицию и отключаются рабочие захваты 19 и 13, а поршень 3 перемещается в исходное состояние. Этот цикл
6 повторяется Мп раз. После отработки Мп шагов прекращается управление соответствующим пневмоцилиндром 2 с помощью пневмораспределителя 24, и включается захват 13. Далее вырабатываются сигналы для
управления обмотками 8 и 9 магнитопрово- дов 6 и 7 и захватом 15 для перемещения штока 17 с малыми шагами Nsi. При этом шток 17 будет перемещаться на N31 шагов.
В исходном положении якорь 10 нахо- дится в правом крайнем положении,
Для перемещения штока 17 на один шаг влево включается захват 15, при этом шток
17 и якорь 10 сцепляются друг с другом. Далее включается обмотка 8 магнитопрово- да 6 и якорь 10 вместе со штоком 17 притягиваются к магнитопроводу 6, т.е. шток 17 совершает один шаг влево на величину, равную величине воздушного зазора дэ .
Далее включаются фиксирующий за- хват 19 и обмогка 9 магнитопровода 7, При этом включаются рабочий захват 15 и обмотка 8 магнитопровода 6. Так как фиксирующий захват 19 установлен неподвижно на корпусе 28 привода, то и шток 17 тоже оста- ется неподвижным в момент, когда якорь 10 притягивается к магнитопроводу 7, т.е. якорь 10 совершает холостой ход, возвращаясь в исходное положение.
Далее с выключением фиксирующего захвата 19 и обмотки 9 магнитопровода 7 включается рабочий захват 16 и обмотка 8 магнитопровода 6. При этом шток 17 совершает второй шаг и аналогичным образом якорь 10 возвращается в исходное положе- ние. Таким образом, цикл повторяется до тех пор, пока шюк 17 перемещается влево на N3i шагов.
Теперь поясним перемещение штока 18 вправо с шагами 32 на N32 шагов.
При этом надо отметить, что штоки 17 и
18 могут перемещаться одновременно, т.е. в момент перемещения штока 17 влево на Nai шагов шток 18 перемещается вправо на N32 шагов или последовательно, после пере- мещения штока 17 влево на N3i шагов начинает перемещаться вправо шток 18. Это становится возможным благодаря автономным управлениям пневмораспределителей 24, обмоток 8 и 9 возбуждения, рабочих за- хватов 13-16 и фиксирующих захватов 19 и 20.
Допустим шток 18 перемещается вправо в момент, когда шток 17 начал перемещаться влево с шагами dj . Тогда при перемещении штока 17 влево (вкпючему обмотка 8, захват 15 и выключены обмотка 9 и фиксирующий захват 19) шток 18 остается неподвижным, тзк как якорь 10 перемещается влево. При этом фиксирующий захват 20 включен, а рабочий захват 16 выключен.
Далее, с выключением соответствующей обмотки 8, фиксирующего захвата 20 включается обмотка 9 и рабочий захват 16. При этом шток 18 и якорь 10 зацеплены друг с другом и вместе совершают вправо один шаг. В этот момент захват 19 включен, а захват 15 выключен и шток 17 остается неподвижным.
Далее, с выключением соответствую щей обмотки 9 и рабочего захвата 16 включаются обмотка 8 и фиксирующий захват 20. Якорь 10 притягивается к магнитопроводу б, шток 18 неподвижен, а шток 17 перемещается влево на один шаг и таким образом цикл повторяется до отработки приводом N3i шагов для штока 17 и N32 шагов для штока 18.
Аналогичным образом перемещаются штоки 17 и 18 в противоположные стороны или одновременно в одну сторону.
Таким образом, устройство гознолачт осуществлять фиксацию штока (ir-токов i 7 и 18) с заданной тичмост; О в любой ; IMKG позициониропанич во осем диапазоне порк- мещения и повысить тяговые усилит, гут ем комбинации пневматического и электромагнитное приводов.
Формула и с о 5 р :i т е н и я
Пневматический шаговый ПОИРСД по авт.св. Nk 1504379, отличающий с т---м, что, с целью повышения точности п..ииио- нирования и увеличения тягоэых .чтий каждый из пневмоцилиндров дополнтель- но снабжен двумя дисковыми электромагнитами с общим якорем, выполненным с возможностью взаимодействия со штоками посредством дополнительно установленных управляемых рабочих захватов.
Фие.2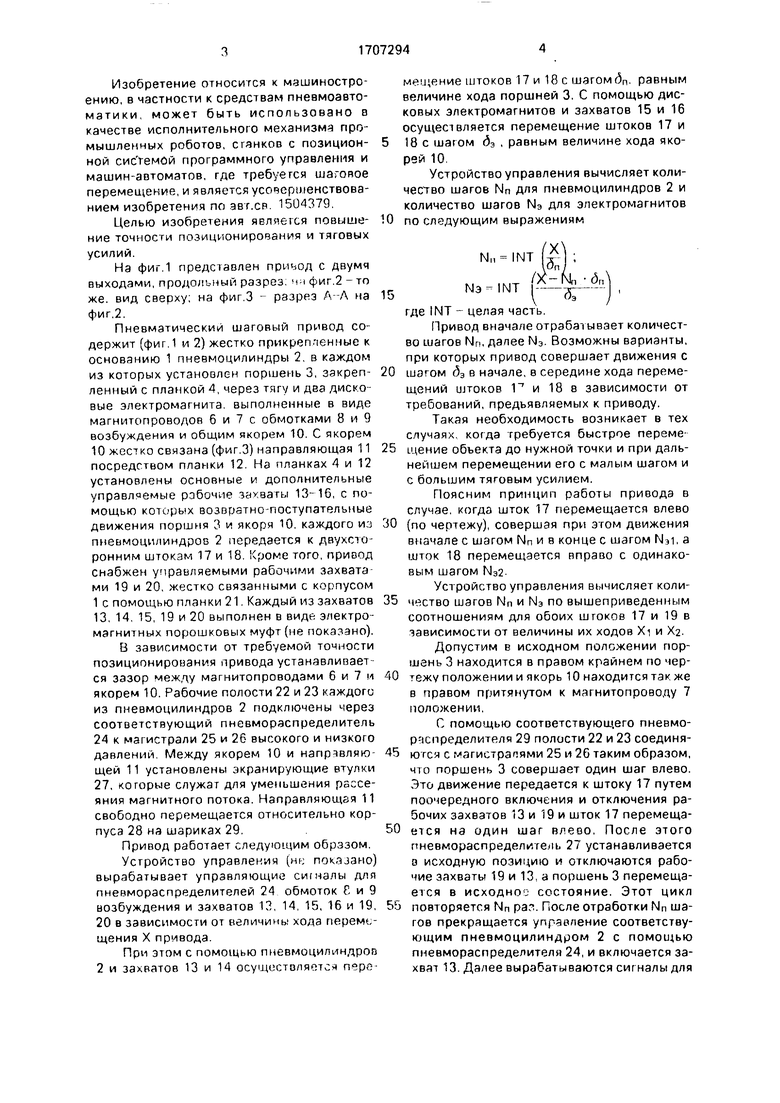
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический шаговый привод | 1988 |
|
SU1504379A1 |
| Устройство для подачи многослойного настила материала к вырубочному прессу | 1985 |
|
SU1370142A1 |
| Станок для намотки якорей электрических машин | 1977 |
|
SU736280A1 |
| Пневматический шаговый привод | 1979 |
|
SU802659A1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1986 |
|
SU1371746A1 |
| СПОСОБ УПРАВЛЕНИЯ РУЛЕВЫМ ПНЕВМОПРИВОДОМ УПРАВЛЯЕМОЙ РАКЕТЫ И РУЛЕВОЙ ПНЕВМОПРИВОД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254501C2 |
| Автомат для обработки отверстий в деталях | 1986 |
|
SU1342679A1 |
| СПОСОБ УСТАНОВКИ ЭЛЕМЕНТОВ ПРОТИВОСКОЛЬЖЕНИЯ В ПРОТЕКТОР ПОКРЫШЕК ПНЕВМАТИЧЕСКИХ ШИН | 1993 |
|
RU2050286C1 |
| Станок для ротационной обработки давлением полых изделий | 1989 |
|
SU1639833A1 |
| Позиционный пневмопривод | 1986 |
|
SU1359503A1 |
Изобретение м.б. использовано в качестве исполнительного механизма промышленных роботов, станков с позиционной системой программного управления и т.д. Цель изобретения - повышение точности 22 I Abx позиционирования и тяговых усилий. Привод состоит из двух частей - пневматической и эпектромагнитной. Пневматическая часть выполнена в виде пневмоцилиндров 2, поршни 3 которых связаны с одной планкой (П). а электромагнитная часть - в виде магни- топроводов б и 7 с обмотками 8 и 9 и дискового якоря 10. связанного с другой П. П снабжены управляемыми рабочими захватами (УРЗ), с помощью которых возвратно-поступательные движения поршня 3 и якоря 10 передаются к двухсторонним штокам (Ш) 17 и 18. Кроме тог о, привод снабжен УРЗ, которые фиксируют III 17 и 18 относительно основания 1. Осуществляя циклическое переключение УРЗ при работе пневматической и электромагнитной частей, достигается шаговое перемещение Ш 17 и 18с необходимым тяговым усилием и заданной точностью. 3 ил. ел С Si to VJ 3 &ь ю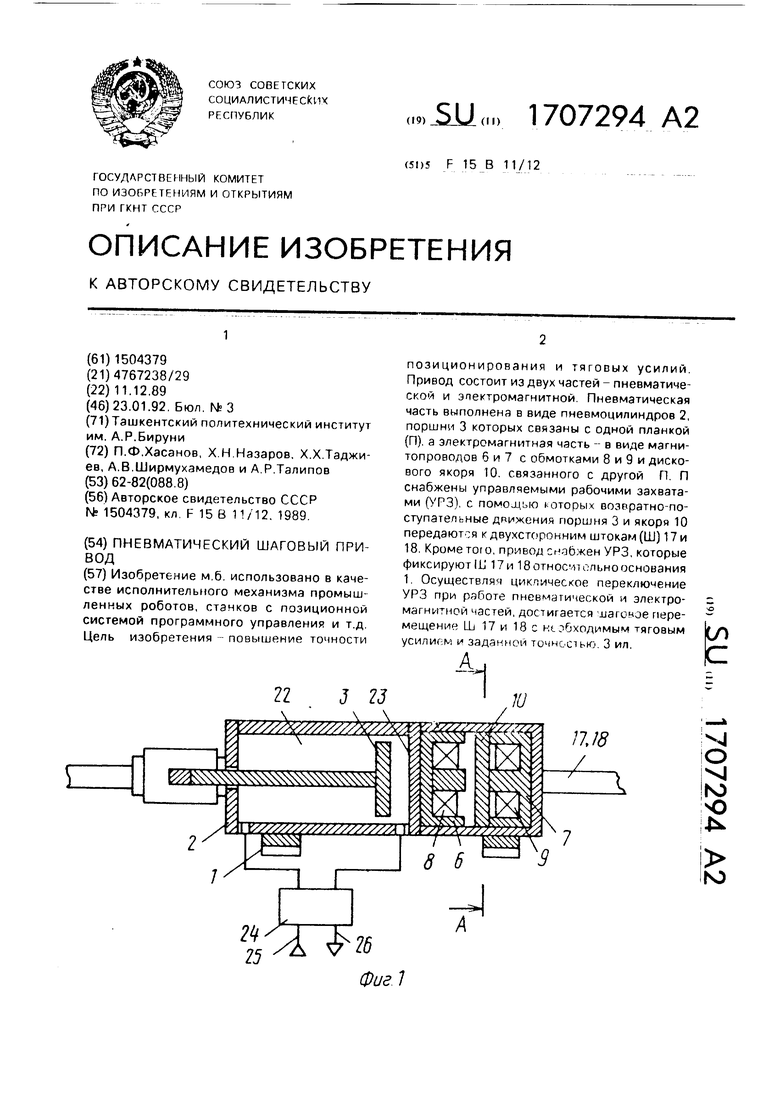
Составитель В.Коваль Редактор В.Бугренкова Техред М.Моргентал
| Пневматический шаговый привод | 1988 |
|
SU1504379A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
