(54) ПНЕВМОГИДРАВЛИЧЕСКИЙ ДОЗАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический позицион-Ный пРиВОд | 1979 |
|
SU795870A1 |
| Пневмогидравлическое программное дозирующее устройство для управления гидроцилиндром | 1983 |
|
SU1140099A1 |
| Пневмогидравлический дозатор | 1976 |
|
SU606266A1 |
| Многопозиционный агрегатный станок | 1989 |
|
SU1779544A1 |
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| АВТОМАТИЧЕСКОЕ НАГНЕТАТЕЛЬНОЕ УСТРОЙСТВО ВЫСОКОВЯЗКИХ МАТЕРИАЛОВ | 2012 |
|
RU2499947C1 |
| Пневмогидравлический позиционныйпРиВОд | 1979 |
|
SU795869A1 |
| Устройство для розлива жидкости | 1989 |
|
SU1631043A1 |
| Пневмогидравлический привод машин для сварки трением | 1983 |
|
SU1098722A1 |
| Пневмогидравлический позиционный привод | 1984 |
|
SU1186838A1 |
1
Изобретение относится к машиностроению и может быть использовано в различном технологическом оборудовании, перемещение исполнительных j гидравлических приводов которого производится по заданной программе.
Известны конструкции дозаторов, содержащие пневмогидравлический мультипликатор , программоаппар т с при- 10 водом и управляющую аппаратуру, обеспечивающие подачу определенной дозы рабочей жидкости в исполнительный гидроцилиндр, что позволяет получить соответствующее перемещение послед- 15 него. Последовательно выдавая разные по величине дозы рабочей жидкости в разные полости исполнительного гидроцилиндра по заданной программе, можно управлять работой механизма (1.20
В известном пневмогидравлическом дозаторе регулировка дозы рабочей жидкости, а следовательно, и величина шага .исполнительного гидропровода, определяется положением гайки-упора, 25 размещенной внутри полого плунжера дозатора и перемещаемой винтом, приводимым во вращение через коническую пару от электродвигателя. Управление электродвигателем осуществляется 30
от электрической системы управления по заранее составленной программе.
Недостатками указанной конструкции являются наличие дорогостоящей и громоздкой системы управления электродвигателем привода ходового винта; . Наличие шагового электродвигателя кинематической цепи между эЛектродвигателем и гайкой-упором с характерной кинематической погрешностью, отражающейся на точности позиционирования гайки-упора, а, следовательно, и на точности дозирования рабочей жидкости.
Цель изобретения - упрощение конструкции и повышение точности выдаваемых по определенной программе доз рабочей жидкости.
Указанная цель достигается тем, что программоаппарат выполнен в виде многопозиционного делительного устройства, в позициях которого установлены задающие и управляющие упоры. Кроме того, задающие упоры выполнены с возможностью осевого перемещения и снабжены пружинами.
Все это дает возможность обеспечивать полное программное управление работой исполнительного гидравличес4
кого устройства без сложной системы управления. Пружины задающих упоров .позволяют разгрузить nporpaNnvioannaрат от усилия дозатора.
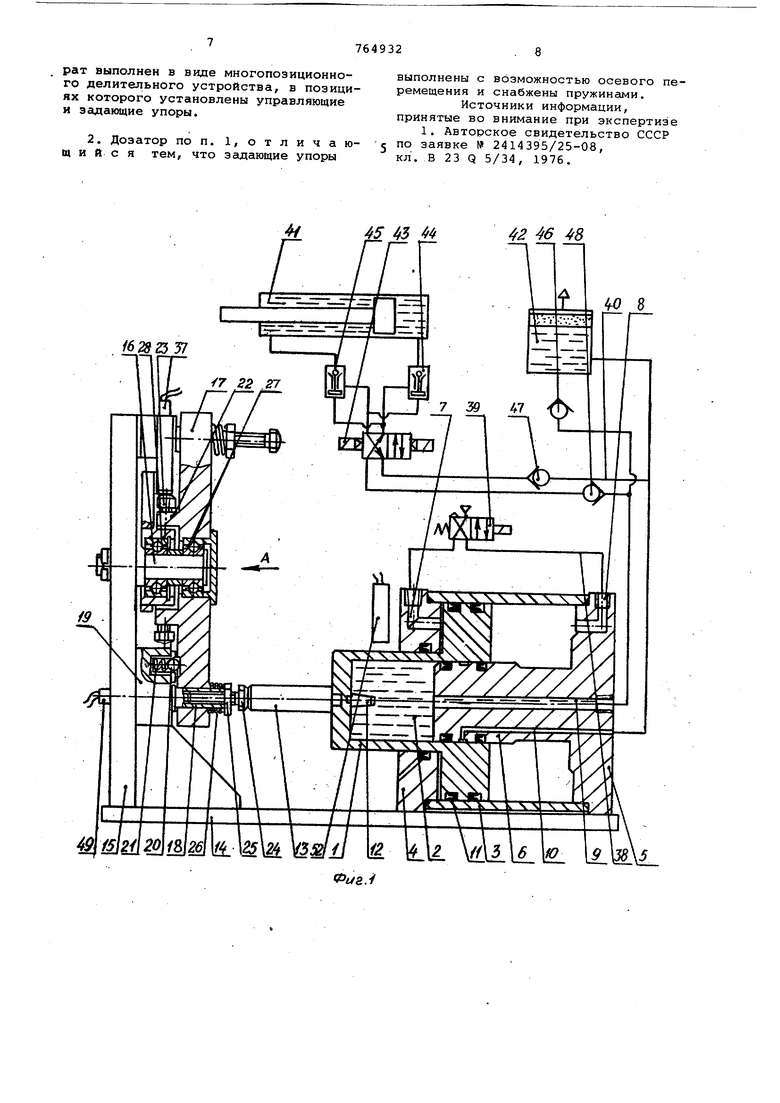
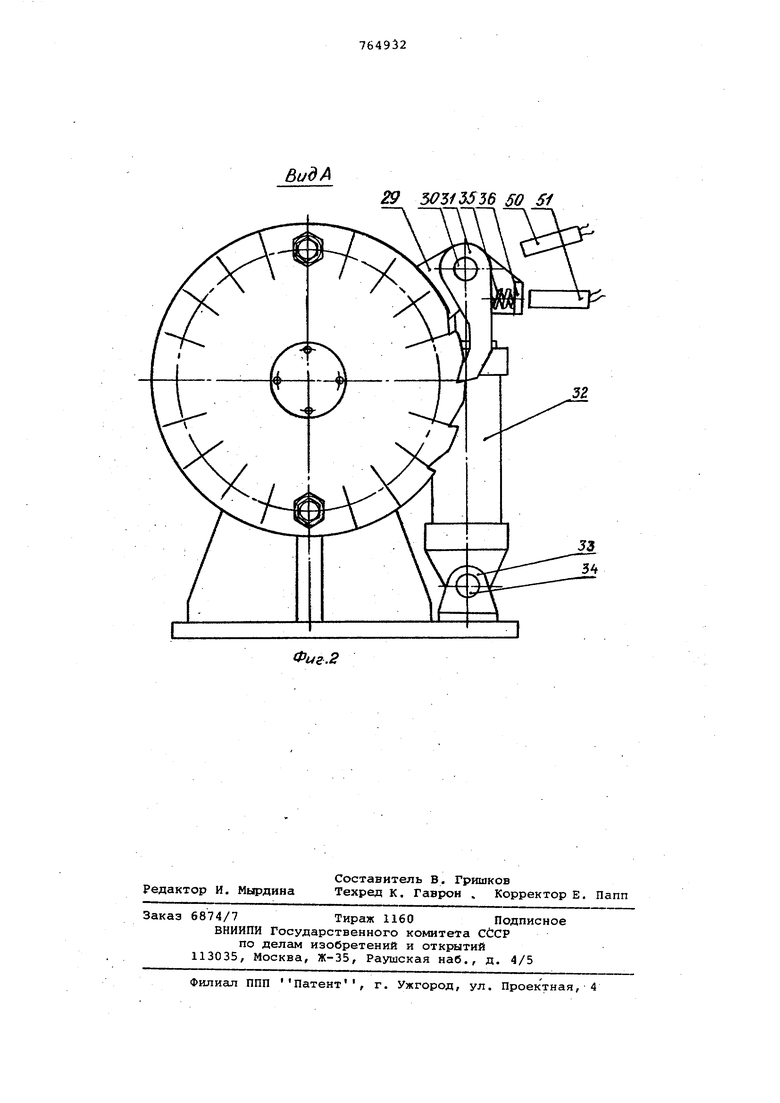
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 вид А на фиг. 1.
Пневмогидравлический дозатор со(Держит Пневмогидравлический мультипликатор, имеющий шток-поршень1, в штоковой части которого выполнена плунжерная полость 2. Шток-поршень помещен внутри корпуса, состоящего из гильзы 3, крышки 4 и плунжер-крышки 5, содержащей плунжер 6. В крышке 4 и плунжер-крышке 5 выполнены пневматические каналы 7 и 8. В плун-жер-крышке 5 выполнен гидравлический канал 9, расположенный по оси, и дренажный канал 10. Плунжерная полость 2 и плунжер б образуют плунжерную пару, предназначенную для дозирования жидкости, а поршневая часть шток-поршня 1 и корпус образую пневмопривод.
в шток-поршне 1, крышке 4 и плунжере 6 установлены манжеты 11. На шток-поршне 1 в плунжерной полости 2, соосно с гидравлическим каналом 9, закреплен дроссельный конус 12, а снаружи - стержень 13.
Пневмогидравлический дозатор закреплен на основании14, к которому приварена стойка 15. На стойке закреплена ось 16, предназначенная для монтажа программоаппарата.
Программоаппарат состоит из многопоэйционного диска 17, в каждой позиции которого выполнено отверстие, в котором помещена ось 18. )Многопозиционный диск выполнен в виде храпового колеса, эубья которого предназначены для его поворота с. позиции на позицию. Число храповых зубьев равно (или кратно) числу позиций.
В планке 19, приваренной к стойке 15, расположены шарик-фиксатор 20 и пружина 21, предназначенные для прижатия шарика-фиксатора к поверхноти многопозиционного диска 17, На этой поверхности выполнены,впадины, предназначенные для фиксации диска 17. Впадины расположены по окружноети равномерно, а их число равно числу позиций. На многопозиционном.диске выполнен кольцевой выступ 22, в некоторых отверстиях которого помещены управляющие упоры 23. Отверстия рао оложены-по окружности равномерно, а их число равно числу позиций. Ось 18 имеет с одной стороны головку, а.с другой - резьбовое отверстие, в которое ввинчивается задающий упор 24. Гайка 25 предназначена для стопорения упора 24 и ограничения пржины 26.
Многопозиционный диск 17 установлен на подшипнике 27 (на оси 16) с возможностью вращения. На этой же
оси на подшипнике 28 установлен качающийся рычаг 29. На оси 30, закрепленной в качающемся- рычаге, помещен храповик 31 и закреплен шток привода программоаппарата, выполненного в виде пневмоцилиндра 32 с проушиной на задней крышке.
К оснЬванию 14 приварено ушко 33, на котором осью 34 шарнирно закреплена проушина пневмоцилиндра 32. Пружина 35 вставлена между выступом 36 качающегося рычага 29 и храповиком 3 Она предназначена для прижатия храповика 31 к храповым зубьям многопозиционного диска 17.
Устройство включает управляющую аппаратуру для пневмо-, электро- и гидросистем.
На стойке 15 закреплен индуктивный торцовый датчик 37, предназначенный для выдачи сигнала о наличии или отсутствии под его торцем управляющего упора.
В пневматической системе 38, присоединенной к пневматическим каналам 7 и 8 дозатора установлен пневмораспределитель 39, предназначенный для пневмопривода дозатора.
В гидравлической системе 40, питающей исполнительный цилиндр 41, присоединенный к гидравлическому каналу 9 дозатора и гидробачку 42, предназначенному для приема сливаемого из полости исполнительного цилиндра 41 масла и питания дозатора при наборе дозы, расположен гидрораспределитель 43, yпpaвляe яae обратные клапаны 44 и 45 и обратные клапаны 46, 47 и 48. Гидробачок 42 соединен также и с дренажным каналом 10 дозатора.
В планке 19 закреплен индуктивный торцовый датчик 49, предназначенный для выдачи сигнала в крайнем левом положении шток-поршня 1. Индуктивные торцовые датчики 50 и 51 предназначены для выдачи сигнсша в крайних положениях пневмоцилиндра 32. Индуктивный торцовый датчик 52 предназначен для выдачи сигнала в крайнем правом положении шток-поршня 1.
В исходном положении дозатора исполнительный цилиндр 41 находится в одном из крайних положений. Все задающие упоры 24 отрегулированы на объем доз, которые должны быть последовательно выданы в исполнительный гидроцилиндр для получения движений в соответствии с циклограммой оборудования .
Многопозиционный диск установлен так, что задающий упор, определяющий набор Д93Ы для первого движения, находится напротив стержня 13. Штокпоршень дозатора находится в крайнем правом положении.
Управляющие упоры 23 помещены в резьбовые отверстия кольцевого выступа 22 только в тех позициях, в которых требуется подать .сигнал на изменение положения гидрораспределителя 43, т.е. направить новую дозу масла в другую полость исполнительного гидроцилиндра. Шток пневмоцилиндра 32 находится в нижнем положении (ра ботает индукционный торцовый датчик 51).
Устройство работает следующим образом.
По команде Пуск пневмораспределитель 39 направляет- воздух в пневматический канал 8, при этом штокпоршень 1 перемещается в сторону крыки 4, а масло из гидробачка 42 через обратный клапан 46 и гидравлический канал 9 засасывается в плунжерную полость до тех пор, пока стержень 13 не встретится.с задающими упорами 24 и не переместит ось 18, сжав пружину 26, до упора в опорную плоскость планки 19.
Шток-поршень 1 в момент сжатия пружины 26 несколько гасит скорость перемещения и ликвидирует.удар.
Индуктивный торцовый датчик 49 выдает сигнал о том, что ось 18 переместилась до встречи с планкой 19. По этому сигналу пневмораспределитель 39 переключается и воздух напраляется в пневматический канал 7. При этом шток-поршень 1 перемещается вправо, а задающий упор 24, ас ним и ось 16, под действием пружины отойдут от индуктивного торцового датчика 49, который дает сигнал на работу пневмоцилиндра 32. Шток пневмоцилиндра 32 идет вверх до срабатывания индуктивного торцового датчика 50. К зтому моменту храповик 31 проходит расстояние несколько больше шага храпового зуба многопозиционного диска 17, который при этом не поворачивается благодаря усилию фиксации, создаваемому пружиной 21 и шариксн -фиксатором 20, и западает по действием пружины 35 в следующий зуб Так как датчик 50 срабатывает , то по его команде шток пневмоцилиндра идет вниз и храповик 31 поворачивает многопозиционный диск, преодолев усилие шарика-фиксатора, пока не сработает индуктивный торцовый датчик 51. Он установлен так, что к моменту его срабатывания многопозиционный диск поворачивается точно на одну позицию а шарик-фиксатор 20 западает в его впадину. От управляющего упора 23 датчик 37 подает сигнал на изменение положения гидрораспределителя 43, но оно происходит только после окончания хода дозатора и срабатывания индуктивного торцового датчика 52,
Шток-поршень 1, перемещаясь вправо, выдавливает масло из плунжерной полости по гидравлическому каналу 9 в гидросистему, через обратный клапан 48 (клапан 46 не пропускает масло) к гидрораспределителю 43 и далее в какую-либо полость исполнительного
цштиндра 4. В конце хода шток-поршня дроссельный конус 12 начинает перекрывать сечение гидравлического канала. Скорость истечения жидкости постепентяо уменьшается. Одновременно . уменьшается скорость шток-поршня, и в момент встречи его с плунжер-крышкой 5 удара не происходит. Кроме того, так как скорость истечения - уменьшается, скорость штока исполнительного цилиндра 41, а следовательfOно, и перемещаемого узла так же в конце хода уменьшается, и остановка про;исходит плавно, без удара. Когда вся доза масла вытесняетея,срабатывает индуктивный торцовый датчик 52, по
15 сигналу которого может изменить положение гидрораспределитель 43, если есть команда датчика .37 от управляющего упора 23, и пневмораспределитель 39, если поворот многопозиционногр
0 диска 17 уже завершился и индуктивный торцовый датчик 51 сработал. Пневмораспределитель 39 направляет воздух в пневматический канал 8, .штокпоршень перемещается в сторону крьвлки 4, и цикл повторяется, но доза
5 масла определяется уже новым задаю- . щим упором.
Перед исполнительным цилиндром 41 в гидросистеме 40 установлены управляемые обратные клапаны 44 и 45. Они
0 пропускают масло, т.е. открыты, только тогда, когдя хотя бы в одной ветви есть давление (идет подача масла). Если ни в одной из полостей масло не поступает, они закрыты и предот5вращают перемещение штока исполнительного цилиндра 41 от внешнего усилия. В электрической системе устройства помещен счетчик циклов срабатывания датчика 49 (на схеме не указан),
0 который после прохождения всех позиций программоаппарата (многопозиционного диска 17) выдает команду на загрузку-разгрузку деталей, в станке, после чего по команде Пуск оператора полный цикл .работы повторяется.
5
Данная конструкция и схема гйэдключения при всей своей простоте обеспечивают программируемое перемещение исполнительного рабочего гидропривода в обоих направлениях с плавным тор0можениемпри подходе к заданному положению. В результате программное управление гидравлического исполнительного устройства :осуществляетея отказом от дорогостоящей системы уп5равления, кинематических устройств и электродвигателей, снижающих точность дозирования.
Формула изобретения 1. Пнёвмогидравлический дозатор,
0 содержащий Пнёвмогидравлический мультипликатор, программоаппарат с приводом и управляющую аппаратуру, отличающийся тем, что, с целью упрощения конструкции и повышения
5 точности дозирования, программоаппаpar выполнен в виде многопозиционного делительного устройства, в позициях которого установлены управляющие и задающие упоры.
выполнены с возможностью осевого перемещения и снабжены пружинами.
Источники информации, принятые во внимание при экспертизе
Фиг.1/ 48
Вид А
