Изобретение относится к измерительной технике и может использоваться для измерения геометрии деталей сложной формы, например лопаток турбин газотурбинных двигателей.
Цель изобретения - повышение точности измерений за счет использования бесконтактного метода измерений.
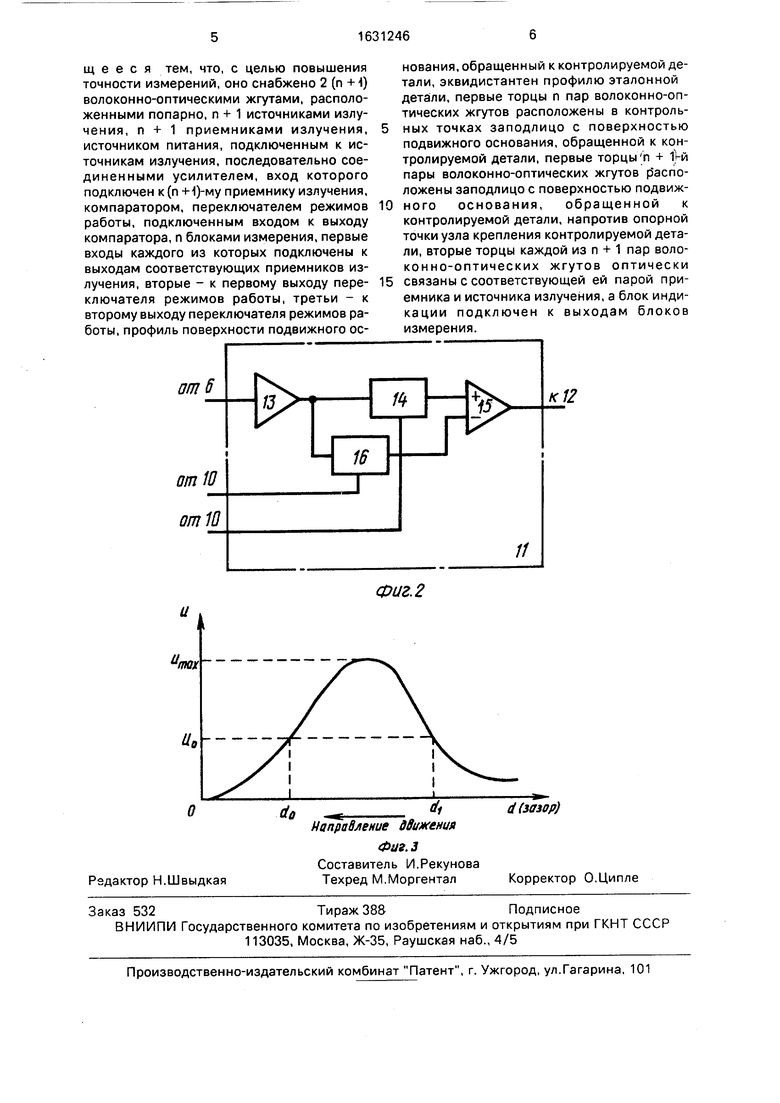
На фиг.1 приведена блок-схема устройства; на фиг,2 - вариант выполнения измерительного блока; на фиг.З - зависимость сигнала на выходе фотоприемника от расстояния до поверхности контролируемой детали.
Устройство (фиг.1) содержит неподвижное основание f, размещенный на нем узел 2 крепления контролируемой детали, подвижное основание 3 с 2 (п + {) волоконно-оптическими жгутами 4. Волоконно- оптические жгуты 4 располагаются парами, причем п пар располагаются в точках, соответствующих контрольным точкам контролируемой детали передними концами заподлицо с поверхностью, обращенной к контролируемой детали. Эта поверхность выполняется эквидистантной поверхности контролируемой детали.(п + 1)-я пара волоконно-оптических жгутов 4 располагается в точке, соответствующей опорной точке на узле 2 крепления контролируемой детали. Источники 5 излучения расположены заподлицо с задними концами первых волоконно- оптических жгутов 4 каждой пары. Приемники 6 излучения расположены заподлицо с задними концами вторых волоконно-оптических жгутов 4 каждой пары. Источники 5 излучения соединены с выходом источника 7 питания. Выход (п + 4)-го приемника 6 излучения соединен с входом усилителя 8, выход которого подключен к первому входу компаратора 9. Источник опорного напряжения (не показан) подключен к второму входу компаратора 9. Выход компаратора 9 соединен с переключающим контактом переключателя 10 режима работы Работа - обучение. Выходы п приемников излучения подключены к первым входам блоков 11 измерения, выходы которых подключены к п входам блока 12 индикации. Вторые входы блоков 11 измерения соединены с контактом Работа переключателя 10 режима работы. Третьи входы блоков 11 измерения соединены с контактом Обучение переключателя 10 режима работы.
Блок 11 измерения (фиг.2) содержит усилитель 13, первый элемент 14 памяти,, дифференциальный усилитель 15, второй элемент 16 памяти. Вход усилителя 13 является первым входом блока. Выход усилителя 13 соединен с входами первого элемента 14 памяти и второго элемента 16 памяти, выходы которых соединены с первым и вторым входами дифференциального усилителя 15 соответственно.
Стробирующие входы первого элемента 14 памяти и второго элемента 16 памяти являются вторым и третьим входами блока соответственно. Выходом блока 11 измере0 ния является выход дифференциального усилителя 15.
Устройство работает следующим образом.
В режиме Обучение в узле 2 крепле5 ния закрепляется эталонная деталь. Подвижное основание 3 перемещается к узлу 2 крепления. При движении напряжение на выходах усилителей 13 (фиг.2) изменяется по закону, показанному на фиг.З. При дости0 жении зазора между подвижным основанием 3 и узлом 2 крепления, равного di (соответствует значению Uo), на выходе компаратора 9 формируется логическая единица. Это вызывает открывание элементов 14
5 памяти, т.е. напряжение на их выходах точно соответствует входному в каждый момент времени. На спадающем участке (имакс,0) характеристики (фиг.З) в момент равенства выходного напряжения усилителя 8
0 (фиг.1) напряжению Do источника опорного напряжения (не показан) на выходе компаратора 9 появляется напряжение О. Это приводит к запиранию элементов 14 памяти (фиг.2), т.е. напряжение на их выходах не
5 зависит от входного и равно входному напряжению, действовавшему в момент запирания.
Далее подвижное основание 3 перемещается в исходное положение. В узле 2
0 крепления закрепляется контролируемая деталь. Переключатель 10 режима работы переводится в положение Работа. Подвижное основание 3 перемещается к узлу крепления 2. При этом аналогично режиму
5 Обучение производится запись выходных напряжений усилителей 13 (фиг.2) в элементы 16 памяти. После этого подвижное основание 3 перемещается в исходное положение. При этом сразу после перехода
0 компаратора 9 из состояния Г в О блок 12 индикации показывает отклонение размеров в контролируемых точках измеряемой детали от размеров эталонной детали в этих точках.
5Формула изобретения
Устройство для контроля деталей сложной формы, содержащее неподвижное основание, размещенные на нем узел крепления контролируемой детали, подвижное основание, блок индикации,отл и ч а ющ е е с я тем, что, с целью повышения точности измерений, оно снабжено 2 (п + 4) волоконно-оптическими жгутами, расположенными попарно, п + 1 источниками излучения, п + 1 приемниками излучения, источником питания, подключенным к источникам излучения, последовательно соединенными усилителем, вход которого подключен к (п -Н)-му приемнику излучения, компаратором, переключателем режимов работы, подключенным входом к выходу компаратора, п блоками измерения, первые входы каждого из которых подключены к выходам соответствующих приемников излучения, вторые - к первому выходу переключателя режимов работы, третьи - к второму выходу переключателя режимов работы, профиль поверхности подвижного основания, обращенный к контролируемой детали, эквидистантен профилю эталонной детали, первые торцы п пар волоконно-оптических жгутов расположены в контрольных точках заподлицо с поверхностью подвижного основания, обращенной к контролируемой детали, первые торцы п + fi-й пары волоконно-оптических жгутов р аспо- ложены заподлицо с поверхностью подвижного основания, обращенной к контролируемой детали, напротив опорной точки узла крепления контролируемой детали, вторые торцы каждой из п + 1 пар воло- конно-оптических жгутов оптически
связаны с соответствующей ей парой приемника и источника излучения, а блок инди- кации подключен к выходам блоков измерения.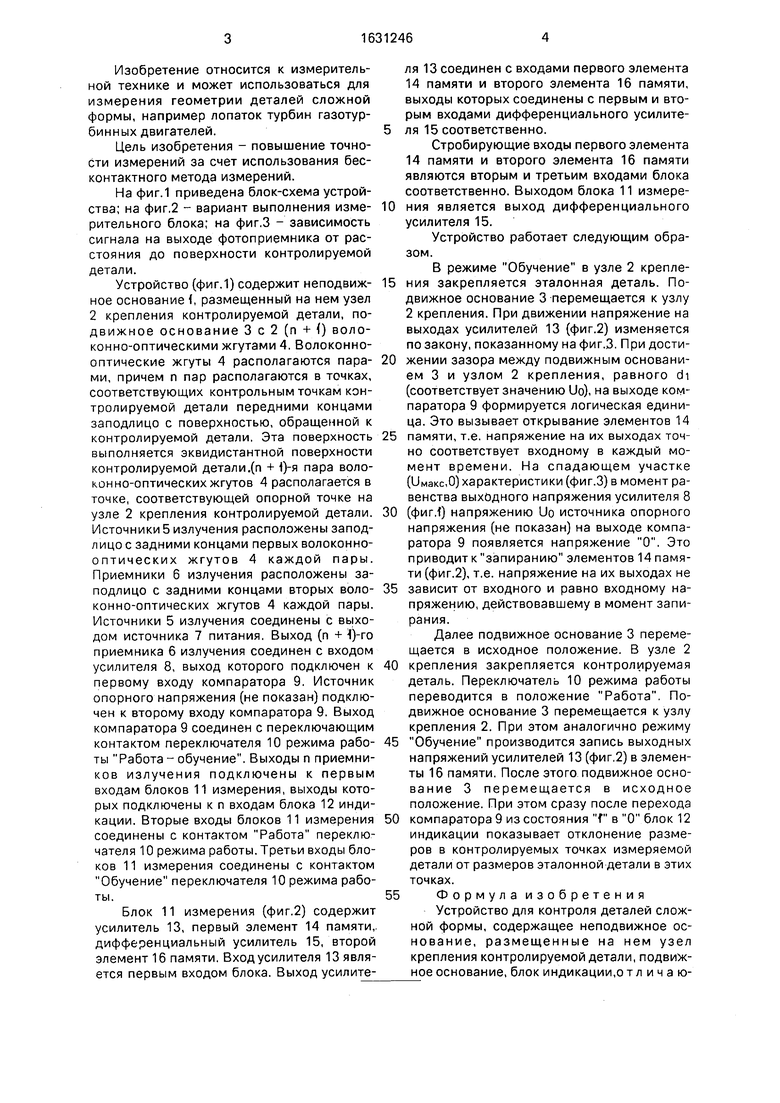
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля деталей сложной формы | 1990 |
|
SU1793201A1 |
| Способ измерения формы объекта и устройство для его осуществления | 1988 |
|
SU1665231A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НЕПРЕРЫВНОГО КОНТРОЛЯ СОСТОЯНИЯ ОБЪЕКТА, СОДЕРЖАЩЕГО ГЕРМЕТИЧНЫЕ КОНТЕЙНЕРЫ С ВЫСОКОТОКСИЧНЫМИ РАДИОАКТИВНЫМИ МАТЕРИАЛАМИ | 2021 |
|
RU2757867C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА С БЕЗОПАСНОЙ ПЕРЕДАЧЕЙ ИНФОРМАЦИИ | 1995 |
|
RU2100906C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАЗМЕРОВ ИЗДЕЛИЙ | 2004 |
|
RU2282140C2 |
| Тренажер сварщика | 1984 |
|
SU1374271A1 |
| Тренажер сварщика | 1986 |
|
SU1330649A1 |
| Устройство для контроля качества наружной резьбы | 1991 |
|
SU1803735A1 |
| ИЗМЕРИТЕЛЬ ШЕРОХОВАТОСТИ | 2008 |
|
RU2375677C1 |
| ОДОМЕТР ДЛЯ ВНУТРИТРУБНОГО СНАРЯДА-ДЕФЕКТОСКОПА | 2004 |
|
RU2275598C2 |
Изобретение относится к измерительной технике и может использоваться для измерения геометрии деталей сложной формы, например лопаток турбин газотурбинных двигателей. Целью изобретения является повышение точности измерений за счет использования бесконтактного метода измерений. В режиме Обучение в узле 2 крепления закрепляется эталонная деталь. Подвижное основание 3 перемещается к узлу крепления. В зависимости от расстояния подвижного узла крепления от эталонной детали изменяется сигнал приемника 6 излучения света, расположенного на приемном конце волоконно-оптического жгута 4. Приемник 6 излучения света воспринимает отраженный от поверхности эталонной детали в соответствующей точке свет от источника 5 излучения. Сигнал с выхода каждого из п приемников 6 излучения света поступает на первый вход соответствующего блока 11 измерения. Сигнал c(n +f)-ro приемника 6 излучения поступает через усилитель 8, компаратор 9, переключатель 10 режимов работы на вторые входы всех блоков 11 измерения. При достижении подвижным осно- ванием 3 заданного положения относительно узла 2 крепления компаратор 9 срабатывает и в блоках 11 измерения фиксируются сигналы, пропорциональные измеряемой величине. Переключатель 10 режимов работы устанавливается в положение Работа, в узле 2 крепления крепится контролируемая деталь. Измерения протекают аналогично. 3 ил. СО о со го -N Os Фп.1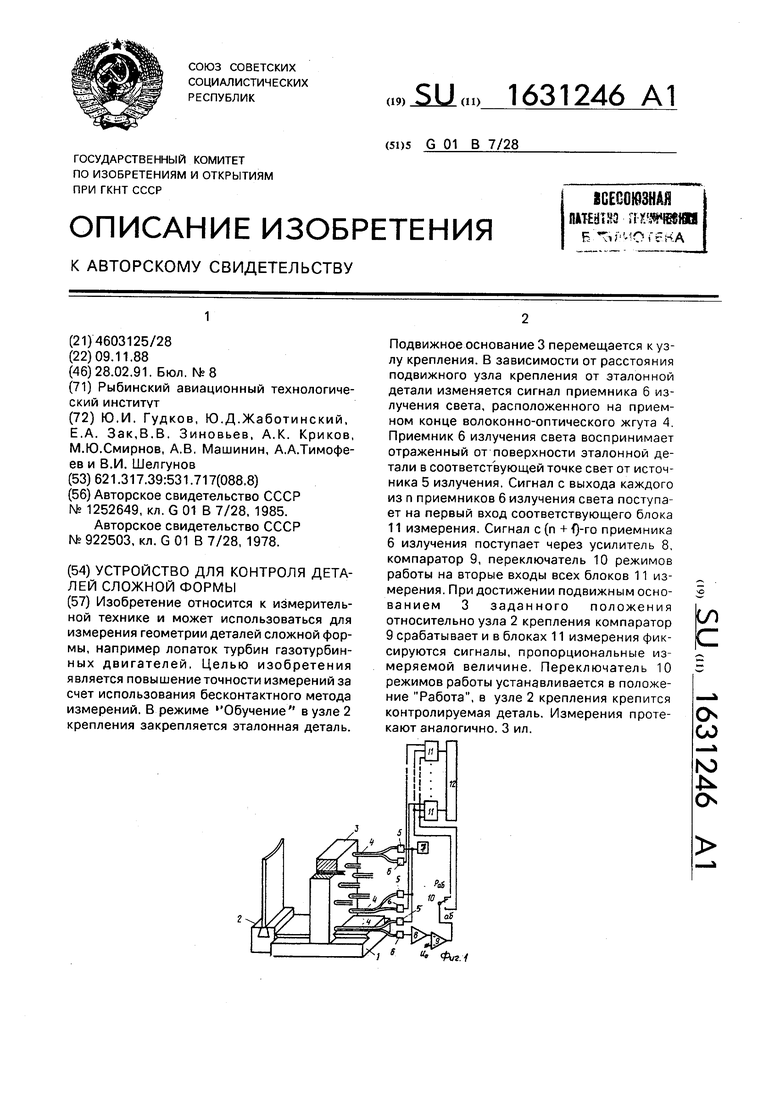
ат 6
от W
от 10
и,
VJW
И
Фиг. 2
| Устройство для контроля профиля деталей | 1985 |
|
SU1252649A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля профиля деталей | 1978 |
|
SU922503A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
