Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля поверхностей оптических деталей.
Цель изобретения - повышение точности за счет упрощения закона движения оптического датчика.
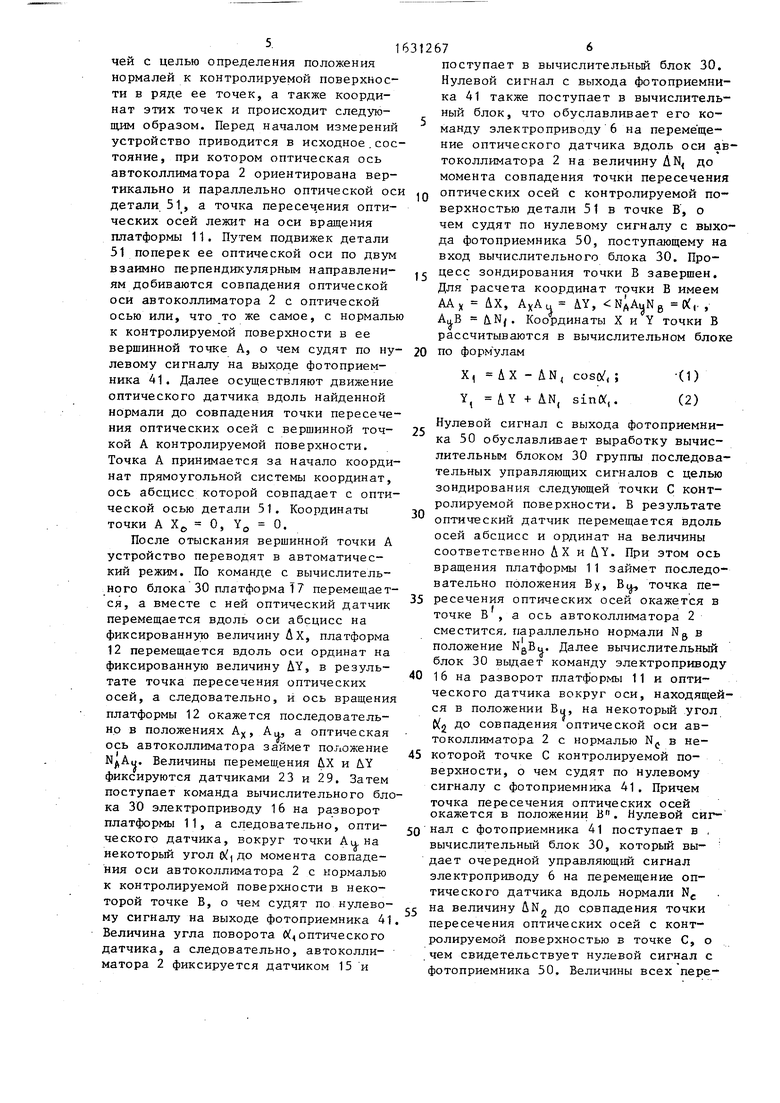
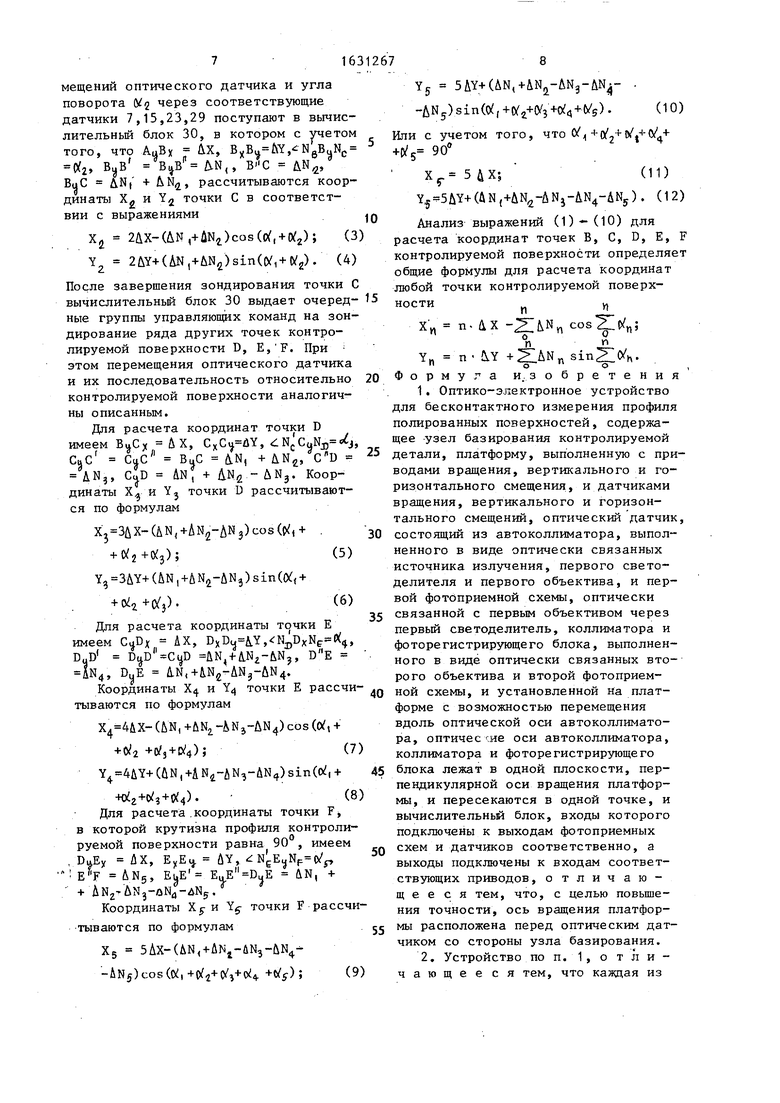
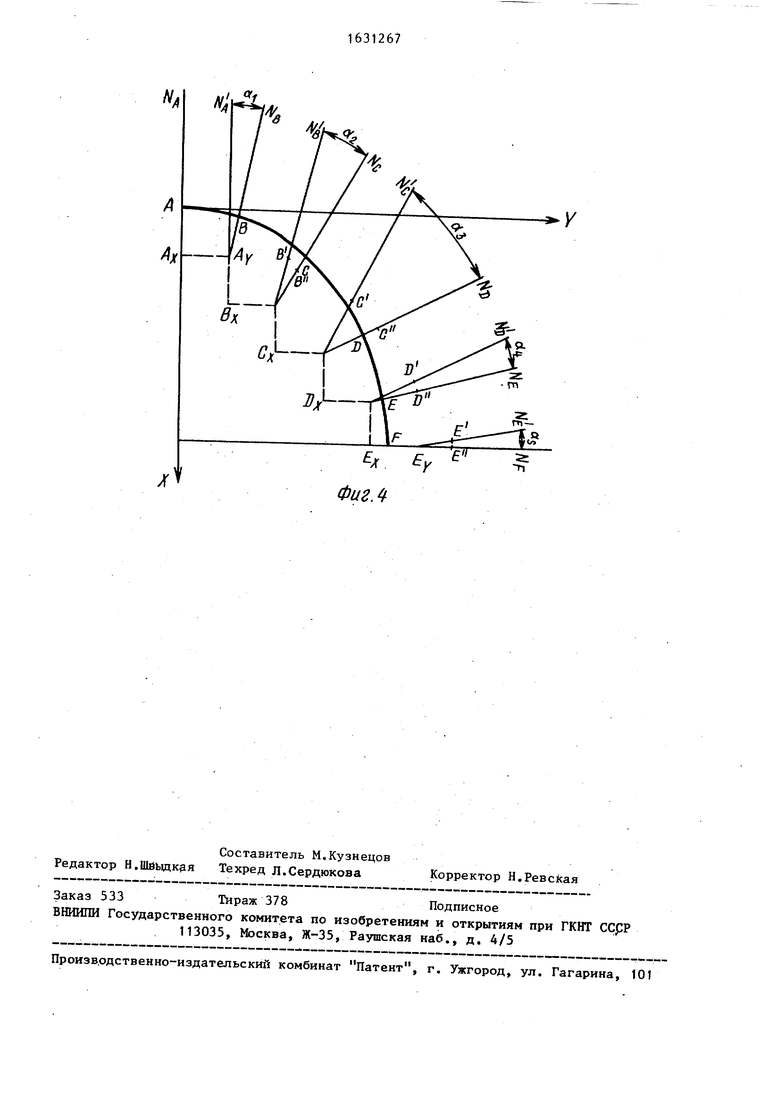
На фиг. 1 представлена кинематическая схема устройства; на фиг. 2 - схема подключения к вычислительному блоку элементов устройства; на фиг.З- оптическая схема оптического датчика; на фиг. 4 - схема передвижения оптического датчика в процессе изме- рения.
Устройство состоит из узла 1 базирования контролируемой детали оптического датчика, состоящего из автоколлиматора 2, коллиматора 3 и фо- торегистрирующего блока 4, платформы 5 , на которой расположен оптический датчик, механизма линейного перемещения оптического датчика вдоль оси автоколлиматора, механически свя- занного с платформой 5 и состоящего из электропривода 6, датчика 7 линейных перемещений, ходового винта 8, подшипников 9, жестко установленных на платформе 5, причем цапфы винта 8 установлены в подшипниках 9, и ходовой гайки 10, платформы 11, гайка 10 жестко связана с платформой 11, а платформа 5 установлена с возможность
перемещения вдоль направляющих плат
формы 11, параллельных оси автоколлиматора 2, платформы 12 с подшипниками 13 и 14 вращения, механически связанными с платформой 5, датчика 15 угла поворота, и электропривода 16, платформа 11 установлена в подшипниках 13 с возможностью вращения вокруг оси подшипников 13, перпендикулярной плоскости осей автоколлиматора 2, коллиматора 3 и фоторегистрирующего блока 4 и проходящей перед оптическим датчиком со стороны базирующего узла 1, платформы 17 с подшипниками 18 и 19 вращения, механизма горизонтального смещения, состоящего из ходового винта 20, цапфы которого закреплены в подшипниках 18 и 19, ходовой гайки 21, механически связанной с винтом 20 и закрепленной на платформе 12, и механически связанных с винтом 20 электропривода 22 и датчика 23, платформа 12 установлена с возможностью горизонтального перемещения в плоскости осей автоколли
5
Q
матора 2, коллиматора 3 и блока. 4 относительно платформы 17, механизма вертикального смещения, состоящего из неподвижно установленных подшипников 24 и 25 вращения, ходового винта 26, цапфы которого закреплены в подшипниках 24 и 25, ходовой гайки 27, механически связанной с винтом 26 и закрепленной на платформе -17, и механически связанных с винтом 26 электропривода 28 и датчика 29, вычислительного блока 30, выходы которого подключены к входам электроприводов 6,16,22 и 28 соответственно, узкополосных усилителей 31 и 32, входы блока 30 подключены к выходам усилителей 31 и 32 и датчиков 7,15,23 и 29 соответственно, входы усилителей 31 и 32 подключены к выходам автоколлиматора 2 и блока 4 соответственно.
Автоколлиматор 2 выполнен в виде оптически связанных источника 33 излучения, конденсатора 34, диафрагмы 35, светоделителя 36 и объектива 37 и фотоприемной схемы, выполненной в виде оптически связанных с объективом 37 через светоделитель 36 светоделителя кубика 38 и выпуклого зеркала 39, оптически связанных с зеркалом 39 через светоделитель 38 объектива 40 и координатно-чувствитель- ного фотоприемника 41, выход которого является выходом автоколлиматора 2.
Коллиматор 3 выполнен в виде оптически связанных источника 42, конденсора 43, диафрагмы 44 и объектива 45.
Фоторегистрирующий блок 4 выполнен в виде оптически связанных объектива 46 и фотоприемной схемы, выполненной в виде оптически связанных светоделителя 47 и выпуклого зеркала 48 и оптически связанных с зеркалом
48через светоделитель 47 объектива
49и координатно-чувствительного фотоприемника 50, выход которого является выходом блока 4. Оптические оси объективов 37,45 и 46 лежат в одной плоскости и пересекаются в одной точке.
Устройство работает следующим образом.
Измерение профиля контролируемой поверхности устройством сводится к зондированию контролируемой поверхности детали 51 световыми лучами автоколлиматора 2 и коллиматора 3, пространственному отслеживанию этих лу51
чей с целью определения положения нормалей к контролируемой поверхности в ряде ее точек, а также координат этих точек и происходит следующим образом. Перед началом измерений устройство приводится в исходное.состояние, при котором оптическая ось автоколлиматора 2 ориентирована вертикально и параллельно оптической ос детали 51, а точка пересечения оптических осей лежит на оси вращения платформы 11. Путем подвижек детали 51 поперек ее оптической оси по двум взаимно перпендикулярным направлени- ям добиваются совпадения оптической оси автоколлиматора 2 с оптической осью или, что то же самое, с нормалью к контролируемой поверхности в ее вершинной точке А, о чем судят по ну- левому сигналу на выходе фотоприемника 41. Далее осуществляют движение оптического датчика вдоль найденной нормали до совпадения точки пересечения оптических осей с вершинной точ- кой А контролируемой поверхности. Точка А принимается за начало координат прямоугольной системы координат, ось абсцисс которой совпадает с оптической осью детали 51. Координаты точки А Х0 О, Y0 0.
После отыскания вершинной точки А устройство переводят в автоматический режим. По команде с вычислительного блока 30 платформа 17 перемещается, а вместе с ней оптический датчик перемещается вдоль оси абсцисс на фиксированную величину Дх, платформа 12 перемещается вдоль оси ординат на фиксированную величину ДУ, в результате точка пересечения оптических осей, а следовательно, и ось вращения платформы 12 окажется последовательно в положениях Ах, Аи, а оптическая ось автоколлиматора займет положение МдАч. Величины перемещения АХ и AY фиксируются датчиками 23 и 29. Затем поступает команда вычислительного блока 30 электроприводу 16 на разворот платформы 11, а следовательно, опти- ческого датчика, вокруг точки Аи, на некоторый угол 0 до момента совпадения оси автоколлиматора 2 с нормалью к контролируемой поверхности в некоторой точке В, о чем судят по нулевому сигналу на выходе фотоприемника 41 Величина угла поворота # оптического датчика, а следовательно, автоколлиматора 2 фиксируется датчиком 15 и
,Q .,- 0 5 о
с п
5
0
676
поступает в вычислительный блок 30. Нулевой сигнал с выхода фотоприемника 41 также поступает в вычислительный блок, что обуславливает его команду электроприводу 6 на перемещение оптического датчика вдоль оси автоколлиматора 2 на величину ДМ до момента совпадения точки пересечения оптических осей с контролируемой поверхностью детали 51 в точке В , о чем судят по нулевому сигналу с выхода фотоприемника 50, поступающему на вход вычислительного блока 30. Процесс зондирования точки В завершен. Для расчета координат точки В имеем АА„ ДХ, AxAu AY, Ј,. , Аи В U.Nj. Координаты X и Y точки В рассчитываются в вычислительном блоке по формулам
X, Ах - AN, cosjtf,; -(1) Y( Д Y + AN, sintf,. (2)
Нулевой сигнал с выхода фотоприемни- ка 50 обуславливает выработку вычислительным блоком 30 группы последовательных управляющих сигналов с целью зондирования следующей точки С контролируемой поверхности. В результате оптический датчик перемещается вдоль осей абсцисс и ординат на величины соответственно ДХ и . При этом ось вращения платформы 11 займет последовательно положения By, B(Ј, точка пересечения оптических осей окажется в точке В , а ось автоколлиматора 2 сместится, параллельно нормали NB в положение N6B,. Далее вычислительный блок 30 выдает команду электроприводу 16 на разворот платформы 11 и оптического датчика вокруг оси, находящейся в положении Вм, на некоторый угол P(g до совпадения оптической оси автоколлиматора 2 с нормалью NO в некоторой точке С контролируемой поверхности, о чем судят по нулевому сигналу с фотоприемника 41. Причем
точка пересечения оптических осей окажется в положении В. Нулевой сигнал с фотоприемника 41 поступает в , вычислительный блок 30, который выдает очередной управляющий сигнал электроприводу 6 на перемещение оптического датчика вдоль нормали Nc на величину ДК„ до совпадения точки пересечения оптических осей с контролируемой поверхностью в точке С, о чем свидетельствует нулевой сигнал с фотоприемника 50. Величины всех переещений оптического датчика и угла оворота W2 через соответствующие атчики 7,15,23,29 поступают в вычисительный блок 30, в котором с учетом того, что AuBx &Х, ,NeBuNc 5 (Х2, ВиВ (, ДН4, ВцС &Nt + Л NU, рассчитываются координаты Х- и Y2 точки С в соответствии с выражениямиJQ
Xu 2U.X-(AN,+ AN2,)cos(tf, + tf2); (3) Y2 2AY+(ANl+AN,)sin((y1+tfJ). (4)
После завершения зондирования точки С вычислительный блок 30 выдает очеред- 15 ные группы управляющих команд на зондирование ряда других точек контролируемой поверхности D, E, F. При этом перемещения оптического датчика и их последовательность относительно 20 контролируемой поверхности аналогичны описанным.
Для расчета координат точки D имеем - А X, , Шс Сц% в, СиСГ СиС BuC U.N, + UN,,, 25 AN,, CuD AN, + &N2 - UN3. Координаты Хл и Y точки D рассчитываются по формулам
(AN(+AN2-AN3)cos(tf, + 3Q + Й2+К3);(5)
Y,3AY+(AN,+ANu-AN5)sin((Xf +
+ 0i4+tf,).(6)
Для расчета координаты точки Е имеем АХ, .Y,, DuD( AN4+AN -bN, AN4, DyE U.N,+&N2-AN3-UN4.
Координаты Х4 и Y4 точки Е рассчи- .Q тываются по формулам
(UN, +Л% -&N j-AN4) cos W, +
+ 0/2 +0/3 + 4);(7)
(UN,+AN4-iN,)sin( 45
-HJi2+0 +0(4). (8)
Для расчета координаты точки F, в которой крутизна профиля контролируемой поверхности равна 90°, имеем , DuEy ИХ, Е„Е UY, 5°
: &N5, EuE .Е UN, +
+ AN2 UN -oNrt-AN5.
Координаты и Yg- точки F рассчитываются по формулам55 X5 - 5AX-(AN +AN4-UN3-UN4- -iN5)cos(Oi,+ 2+0 3+oi4 +); (9)
Y5 5AY+(AN,+&Na-UNg-UN j- - -UN)sin(0(,(y3+0(:i5+6( 5).(Ю
Или с учетом того, что /4+(+« t+(yl + 9(f
Х-- 5 АХ;(11)
9
(А N ,+ANU-U N5-AN4-AN5 ) . (12
Анализ выражений (1)-(10) для расчета координат точек В, С, D, Е, контролируемой поверхности определяе общие формулы для расчета координат любой точки контролируемой поверхности п „
Х„ п-ДХ -2UNn cosZl ;
°ПИ
Yn n - UY +2LANn sinZl.
Формула и. зобретения
1.Оптико-электронное устройство для бесконтактного измерения профиля полированных поверхностей, содержащее узел базирования контролируемой детали, платформу, выполненную с приводами вращения, вертикального и горизонтального смещения, и датчиками вращения, вертикального и горизонтального смещений, оптический датчик состоящий из автоколлиматора, выполненного в виде оптически связанных источника излучения, первого светоделителя и первого объектива, и первой фотоприемной схемы, оптически связанной с первым объективом через первый светоделитель, коллиматора и фоторегистрирующего блока, выполненного в виде оптически связанных второго объектива и второй фотоприемной схемы, и установленной на платформе с возможностью перемещения вдоль оптической оси автоколлиматора, оптичес ие оси автоколлиматора, коллиматора и фоторегистрирующего блока лежат в одной плоскости, перпендикулярной оси вращения платформы, и пересекаются в одной точке, и вычислительный блок, входы которого подключены к выходам фотоприемных схем и датчиков соответственно, а выходы подключены к входам соответствующих приводов,отличающее с я тем, что, с целью повышения точности, ось вращения платформы расположена перед оптическим датчиком со стороны узла базирования.
2.Устройство по п. отличающее ся тем, что каждая из
фотоприемных схем выполнена в виде оптически связанных дополнительного светоделителя и выпуклого зеркала и оптически связанных с выпуклым зеркалом через дополнительный светоде31
литель дополнительного объектива и координатно-чувствительного фотоприемника, выход которого является выходом схемы.
7 15 23 29
у 1r w 4г
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронное автоколлимационное устройство для измерения профиля полированных поверхностей | 1989 |
|
SU1686305A1 |
| Оптико-электронное устройство для бесконтактного измерения профиля полированных поверхностей | 1988 |
|
SU1696862A1 |
| Автоколлимационное устройство для бесконтактного измерения профиля полированных поверхностей | 1986 |
|
SU1394035A1 |
| Устройство для бесконтактного измерения профиля полированных поверхностей | 1983 |
|
SU1186942A1 |
| Устройство для бесконтактного измерения мередиональный профиля полированных поверхностей | 1990 |
|
SU1788432A1 |
| Автоколлимационное устройство для бесконтактного контроля профиля полированных поверхностей | 1986 |
|
SU1320660A1 |
| Фотоэлектрическое автоколлимационное устройство | 1979 |
|
SU783743A1 |
| Способ измерения углов,образуемых тремя гранями призмы,и устройство для его осуществления | 1985 |
|
SU1250848A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
Изобретение относится к контрольно-измерительной технике. Цель изобретения - повышение точности за счет упрощения закона движения оптического датчика. Устройство состоит из узла 1 10 базирования контролируемой детали, оптического датчика, состоящего из автоколлиматора 2, коллиматора 3 и фото- ре гистрирующего блока 4, платформы 5. Оптический датчик установлен на платформе 5, которая выполнена с возможностью перемещения вдоль оси автоколлиматора 2, вертикального и горизонтального перемещения и вращения вокруг оси, расположенной между узлом 1 и оптическим датчиком перпендикулярно плоскости осей автоколлиматора 2, коллиматора 3 и блока 4. Расположение оси вращения между узлом 1 и оптическим датчиком позволяет упростить закон движения платформы 5 в процессе измерения. 1 з.п.ф-лы, 4 ил. о 8 (Л о со tsD 05 Л
сн
Р
32
30
шо
6 16 22 28
Фиг. 2
48
Фцг.З
Фиг А
| Авторское свидетельство СССР № 1311361, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
