Изобретение относится к измерительной технике и приборостроению и может быть использовано для адаптивного измерения физических величин с помощью всевозможных датчиков и измерительных устройств, работающих в условиях мешающих внешних воздействий, а также для автоматической коррекции выходных сигналов датчиков и измерительных устройств.
Цель изобретения - повышение точности, помехоустойчивости и быстродействия измерений физических величин с помощью различных средств измерения в условиях непрерывно меняющихся возмущающих воздействий путем адаптивной периодической с достаточной высокой частотой повторения калибровки средств измерения в течение всего времени измерения.
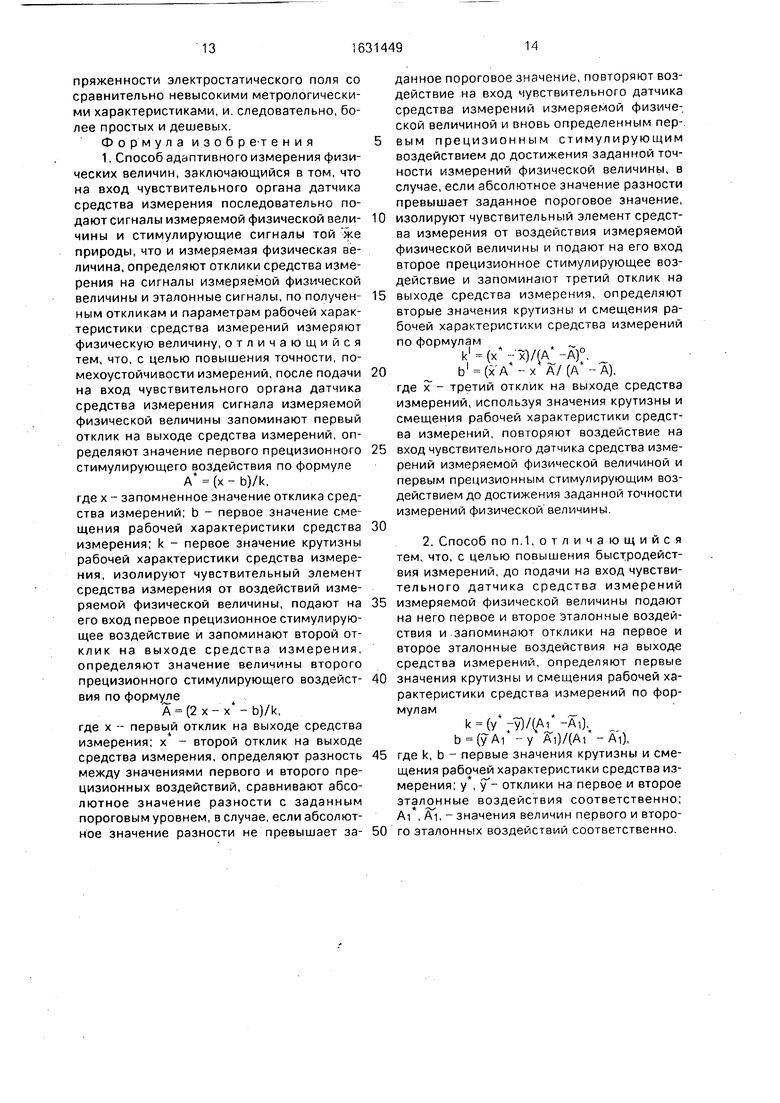
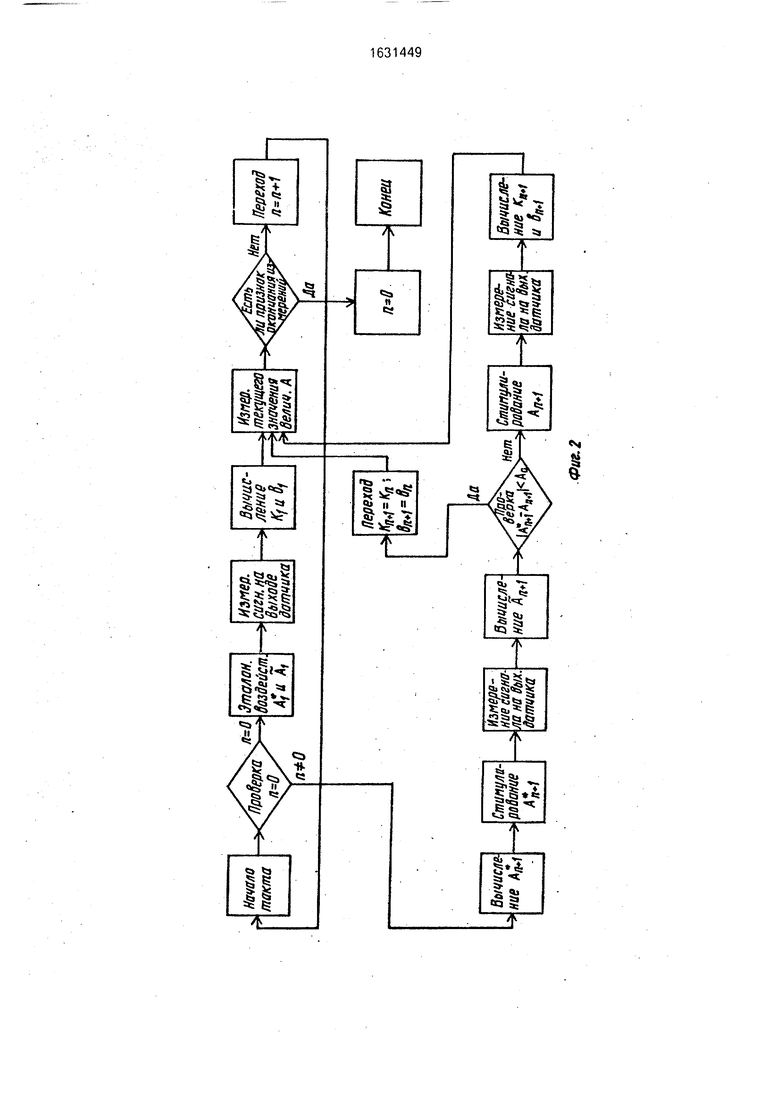
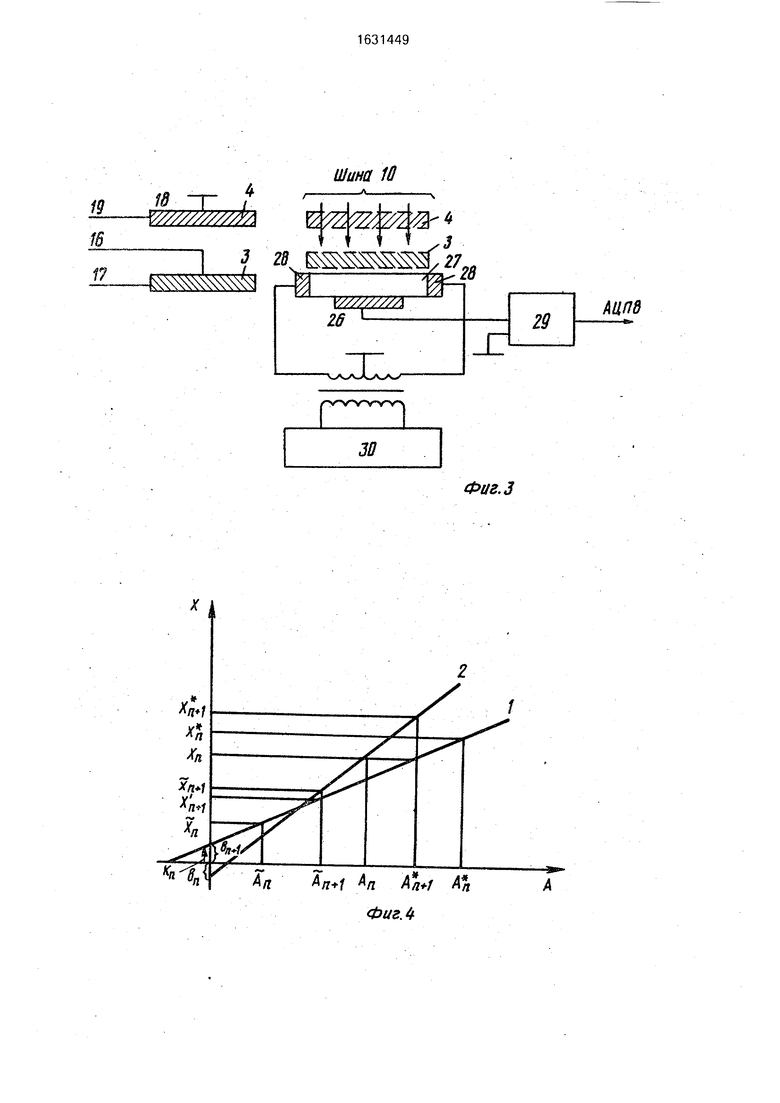
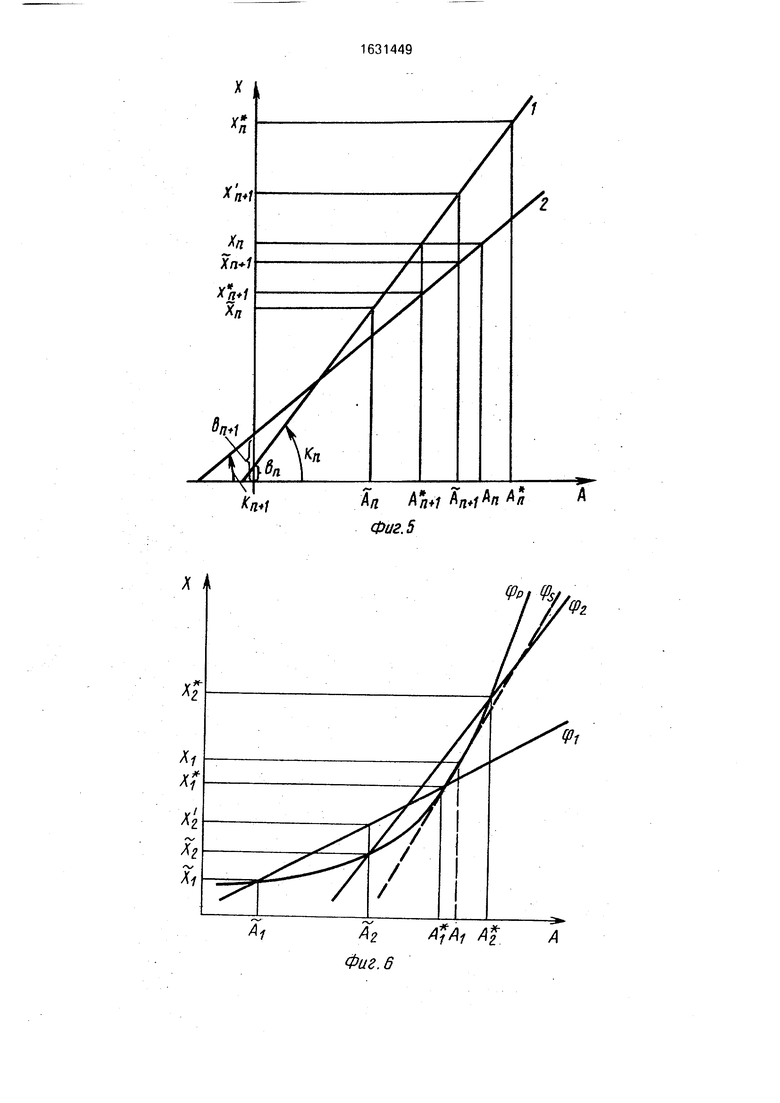
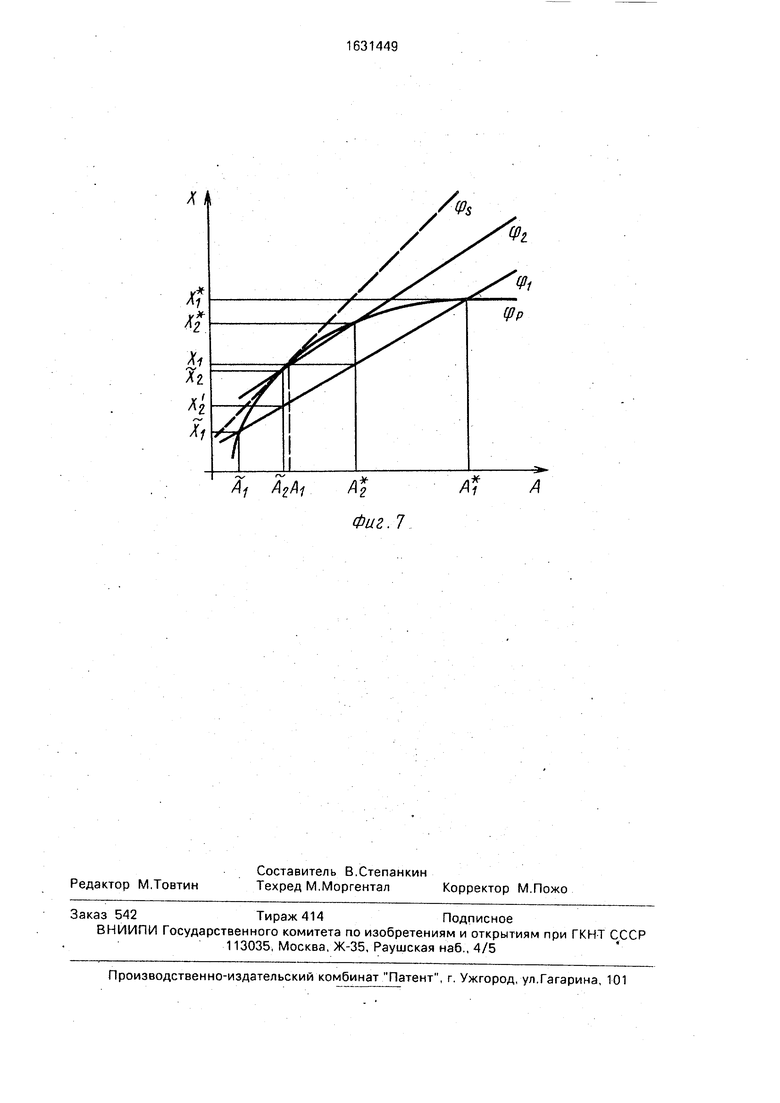
На фиг.1 приведена функциональная схема устройства для измерения напряженности электростатического поля, реализующего способ; на фиг. 2 - блок-схема алгоритма блока управления; на фиг.З - развернутая структура адаптивного датчика напряженности электростатического поля; на фиг. 4 и 5 - основные этапы процедуры калибровки (фиг.4 соответствует калибровке датчика, крутизна рабочей характеристики которого возросла по сравнению с предыдущей (n-ой) калибровкой, фиг.5 - уменьшилась); на фиг.6 и 7 - графики, иллюстрирующие начальный этап работы калибровки при включении датчика при вогО 00
Ј 4ь. О
нутой и выпуклой рабочих характеристиках соответственно,
Сущность способа заключается в периодически чередующемся воздействии на вход средства измерения (на чувствительный орган датчика или первичного преобразователя) сигналов измеряемой физической величины и эталонных сигналов такого же рода, что и измеряемая физическая величина. После такого воздействия определяют значение измеряемой физической величины по значению отклика на нее на выходе средства измерения и параметрам функции преобразования (рабочей характеристики) средства измерения (фиг.4,5), Воздействуют на чувствительный элемент средства измерения (датчика) физической величиной той же природы, что измеряемая физическая величина, и реализуют итерационно (циклически) характерную последовательность операций, состоящую в том, что подают на вход средства измерения измеряемую -физическую величину, запоминают получаемое на выходе средства измерения значение отклика на измеряемую физическую величину, определяют значение вели- чиныпервого прецизионного
стимулирующего воздействия в соответствии с формулой
А { (х - b ),
где А - значение величины первого стимулирующего воздействия; k - значение крутизны рабочей характеристики средства измерения; х - значение отклика на измеряемую физическую величину; b - значение смещения рабочей характеристики средства измерения.
Запоминают значение величины первого прецизионного стимулирующего воздействия, прекращают воздействие на чувствительный элемент средства измерения измеряемой физической величины, осуществляют первое прецизионное стимулирующее воздействие, запоминают значение получаемого на выходе средства измерения отклика на первое стимулирующее воздействие, определяют значение ве- личины второго прецизионного стимулирующего воздействия в соответствии с формулой
А 1 (),(2)
где А - значение величины второго прецизионного стимулирующего воздействия; k - значение крутизны рабочей характеристики средства измерения; х - значение отклика на измеряемую физическую величину; х - значение отклика на первое стимулирующее воздействие; b - значение смещения
рабочей характеристики средства измерения.
Запоминают значение величины второго прецизионного стимулирующего воздей5 ствия, определяют разность между значениями величин первого и второго прецизионных стимулирующих воздействий, сравнивают абсолютное значение разности между значениями величин первого и второ10 го прецизионных стимулирующих воздействий с пороговым уровнем, если абсолютное значение разности между значениями величин первого и второго прецизионных симулирующих воздействий не превышает
15 пороговый уровень, то стирают запомненные значения величин первого прецизионного стимулирующего воздействия, второго прецизионного стимулирующего воздействия, откликов на первое и второе прецизи20 онные стимулирующие воздействия и отклика на измеряемую физическую величину, и повторяют сначала характерную последовательность операций, если же абсолютное значение разности между зна25 чениями величин первого и второго прецизионных стимулирующих воздействий превышает пороговый уровень, то осуществляют второе прецизионное стимулирующее воздействие, запоминают значение
30 получаемого на выходе средства измерения отклика на второе прецизионное стимулирующее воздействие, стирают значения крутизны и смещения рабочей характеристики средства измерения, определяют но35 вые значения крутизны и смещения рабочей характеристики средства измерения в соответствии с формулами
k
b
х - х
. ,
хА -х А
где k - новое значение крутизны рабочей характеристики средства измерения; х - значение отклина на первое прецизионное стимулирующее воздействие; значение отклика на второе прецизионное стимулирующее воздействие; А - значение величины первого прецизионного стимулирующего воздействия; А - значение величины второго прецизионного стимулирующего воздействия; b - новое значение смещения рабочей характеристики средства измерения.
Запоминают новые значения крутизны
и смещения рабочей характеристики средства измерения, стирают значения величин первого прецизионного стимулирующего воздействия, второго прецизионного стимулирующего воздействия, откликов на первое и второе стимулирующие воздействия, отклика на измеряемую физическую величину, повторяют сначала характерную последовательность операций.
Кроме того, для устранения необходимости предварительной калибровки средств измерения при их производстве и повышения точности измерений на начальных итерациях, перед первоначальным осуществлением характерной последовательности операций исключены воздействия на чувствительный элемент средства измерения, измеряемой физической величины, осуществляют первое эталонное воздействие, запоминают получаемое на выходе средства измерения значение отклика на первое эталонное воздействие, осуществляют второе эталонное воздействие, запоминают получаемое на выходе средства измерения значение отклика на второе эталонное воздействие, определяют исходные значения крутизны и смещения рабочей характеристики средства измерения в соответствии с формулами
AI-AI
где k - значение крутизны рабочей характеристики средства измерения, у - значение отклика на первое эталонное воздействие, значение отклика на второе эталонное воздействие; AI - значение величины первого эталонного воздействия; AI - значение величины второго эталонного воздействия, b - значение смещения рабочей характеристики средства измерения
Запоминают значения Крутизны и смещения рабочей характеристики средства измерения, стирают значения откликов на первое и второе эталонные воздействия, снимают экранирование чувствительного элемента средства измерения, причем значения величин первого и второго эталонных воздействий являются постоянными для данного средства измерения (фиг,6, 7).
Если данный такт калибровки не является начальным, то после получения на выходе датчика сигнала, являющегося откликом на текущее измеряемое внешнее воздействие, вычисляют значение измеряемой физической величины, которое в соответствии с крутизной и смещением линейной рабочей характеристики датчика или измерительного устройства, определенными на предыдущем калибровочном такте, должно было бы дать полученное текущее
значение сигнала на выходе датчика, а затем осуществляют генерирование измеряемой физической величины, равной этому вычисленному значению. Полученную в ре- 5 зультате такого преобразования физическую величину подают в качестве первого стимулирующего воздействия. После получения на выходе датчика, являющегося откликом на первое стимулирующее воздей0 ствие, формируют величину второго стимулирующего воздействия, путем вычисления такого значения измеряемой физической величины, которое в соответствии с крутизной и смещением линейной рабочей харак5 теристики датчика сигнала или измерительного устройства, определенным на предыдущем такте калибровки, должно было бы дать значение сигнала, равное разности между удвоенным текущим значени0 ем сигнала на выходе датчика или измерительного устройства и полученным откликом на первое стимулирующее воздействие. Значение величины первого и второго стимулирующих воздействий сравнивают
5 между собой. Если разность значений величин первого и второго стимулирующих воздействий превосходит по абсолютной величине некоторый установленный пороговый уровень, то генерируют второе стиму0 лирующее воздействие, тождественное по своей природе измеряемой физической величине и равное по значению вычисленной величине второго стимулирующего воздействия Второе стимулирующее воздействие
5 подают на чувствительный элемент и по значениям величин двух стимулирующих воздействий и выходных сигналов, являющихся откликами на них, корректируют значения параметров линейной рабочей характери0 стики датчика. В противоположном случае, т.е. если модуль разности значений первого и второго стимулирующих воздействий меньше или равен пороговому уровню, второе стимулирующее воздействие на данном
5 калибровочном такте не подают, так как рабочая характеристика датчика или измерительного устройства, полученная на предыдущем калибровочном такте, не нуждается в корректировке (при данных по0 грешностях измерений, определяющих пороговый уровень), следовательно, значения параметров линейного представления рабочей характеристики датчика или измерительного устройства, определенные на
5 предыдущем калибровочном такте, сохраняют и на данном такте калибровке.
В том случае, если данный такт калибровки является начальным, последовательно подают два эталонных воздействия, тождественных по физической природе измеряемой величине, значения которых хранят в памяти, причем значения этих эталонных воздействий и выходных сигналов, являющихся откликами на них, используют для вычисления значений параметров линейного представления рабочей характеристики датчика на начальном такте калибровки. Калибровочные такты повторяют периодически в процессе выполнения измерений с частотой, превышающей характерные частоты изменений измеряемой величины, помех и дестабилизирующих факторов.
Результат измерения обеспечивается с заданной точностью с момента выполнения условия I Ап+1-Ап+1 I АО (Ао-заданный пороговый уровень), которое обязательно будет достигнуто в процессе адаптации.
Поскольку избежать влияния помех и дестабилизирующих факторов, случайным образом воздействующих как на измеряемый сигнал, тЈ и на рабочую характеристику, не удается, в способе производится автоматический контроль за поведением рабочей характеристики (функции преобразования), средства измерения, адаптация ее в соответствии с результатами воздействия внешней среды коррекции результатов измерения, обеспечивающая их оптимальное приближение к истинным значениям измеряемой физической величины.
Для этого процесс калибровки производится в ходе функционирования средства измерения периодически с частотой, превышающей характерные частоты изменения как измеряемых сигналов, так и дестабилизирующих факторов, влияющих на характеристики средства измерения.
Так как по способу реальная характеристика датчика при калибровке заменяется линейной, то важно обеспечить выполнение следующего условия: линейная аппроксимация рабочей характеристики должна быть касательной к реальной нелинейной характеристике в точке, соответствующей значению измеряемой физической величины. Это достигается тем, что прецизионные стимулирующие воздействия выбираются в окрестности текущего значения измеряемой физической величины An, причем для этого используют следующий алгоритм определения величины первого Ап+1 и второго Ап+1 прецизионных стимулирующих воздействий на (п + 1)-ом калибровочном такте. Сначала находят расчетную величину текущего значения сигнала на выходе средства измерения, равное хп т.е.
Ап+1 у- (хп - bn),(3)
Кп
где kn и bn - соответственно крутизна и смещение линейного представления рабочей характеристики датчика или измерительного устройства, полученные в ходе
предыдущего п-го калибровочного такта.
Генерируют физическую величину, соответствующую по природе измеряемой величине, но никак с ней не связанную и равную по величине Ап+1 и подают эту физическую величину на датчик, в результате чего на выходе средства измерения получают сигнал Хп+1 . Величину второго прецизионного стимулирующего воздействия берут равной такому значению Ап+1 измеряемой
физической величины, которое в соответствии с рабочей характеристикой датчика или измерительного устройства, полученной на n-ом (предыдущем) калибровочном такте, должно было бы дать значение сигнала на
выходе средства измерения, равное разности между удвоенным текущим значением xi сигнала на выходе средства измерения, соответствующим измеряемой физической величине AI и значением выходного сигнала
средства измерения, являющимся откликом Хп+1 на первое прецизионное стимулирующее воздействие Ап+1 . Таким образом величина второго прецизионного стимулирующего воздействия определяется
выражением
Ап+1 -J- (2х - хпн - Ьп) (4)
kn,
Совокупность значений Ап+1 , An+i,
Xn+i , Хп+1 и в дальнейшем используют для
вычисления параметров рабочей характеристики датчика или измерительного устройства на данной (п + 1)-ой калибровке.
При этом до осуществления второго прецизионного стимулирующего воздействия определяет абсолютное значение разности | Ап+1 - Ап+11 между величиной первого прецизионного стимулирующего воздействия и расчетным значением величины прецизионного второго стимулир ющего воздействия и сравнивают I Ап+1 - Ап+11 с пороговым уровяем. Если
lAvV-AVil Ao,(5)
то параметры линейного приближения функции преобразования средства измерения сохраняют свои значения
55
kn + 1 kn ; bn -f 1 bn ,
(6)
и второе стимулирующее воздействие не осуществляют.
Если
I Ап+1 -Ап+11 АО,(7)
то осуществляют стимулирующее воздействие Ап+1, в результате чего получают на выходе средства измерения сигнал хп+1 и определяют новые значения Кп-и и Ьп+1.
kn -И
xn + 1 - xn + 1 An + 1 - An + 1
Xn + 1 An + 1 - x + 1 Kn + 1 ,. Dn + 1 (8)
An + 1 - An + 1
Величина порогового уровня А0 определяется в зависимости от свойств конкретного датчика или измерительного устройства следующим образом: если (Зд - абсолютная погрешность измерения внешних воздействий А, то
А0 t рдь,(9)
где t fi- коэффициент, учитывающий заданный уровень доверительной / вероятности /, для которого принимается справедливостьзаключения по неравенствам (5) и (7), так, для ft 0,95 величина t /J 1,96, а для / 0,99 величина t yj 2,58.
Использованный в данном способе алгоритм определения величины стимулирующих воздействий обеспечивает самосогласованность способа. Самосогласованные процедуры всегда приводят к логически правильному, а не абсурдному результату. Иначе говоря, если параметры линейного представления рабочей характеристики на данном калибровочном также приближаются к ее параметрам на предыдущем такте, то разность между величинами двух последовательных стимулирующих воздействий стремится к нулю, обеспечивается касание прямой линейного представления рабочей характеристики датчика к кривой реальной нелинейной характеристики в точке, соответствующей измеряемому значению измеряемой физической величины, т.е. возникает необходимости в использовании выражений (8) при калибровке. Это можно показать следующим образом.
При kn+1 - knnbn+i - bn ми получим, что An+i - Ап. Следовательно, хп - хпииз формул (3) и (4) следует, что Ап-н - АП+Г, т.е. выполняется условие (9).
Поскольку измеряемая физическая величина является медленно меняющейся по сравнению с частотой выполнения калибровочных процедур (тактов), то реальная, в общем случае нелинейная функция преобразования (рабочая характеристика) средства измерения (датчика, или измерительного устройства) в процессе выполнения измерений между двумя
последовательными калибровками заменяется линейной с определенными параметрами (крутизной и смещением) характеристикой. В результате каждого ка- 5 либровочного такта производится коррекция параметров рабочей характеристики, т.е. снова используется линейная характеристика, но крутизна и смещение ее могут быть другими.
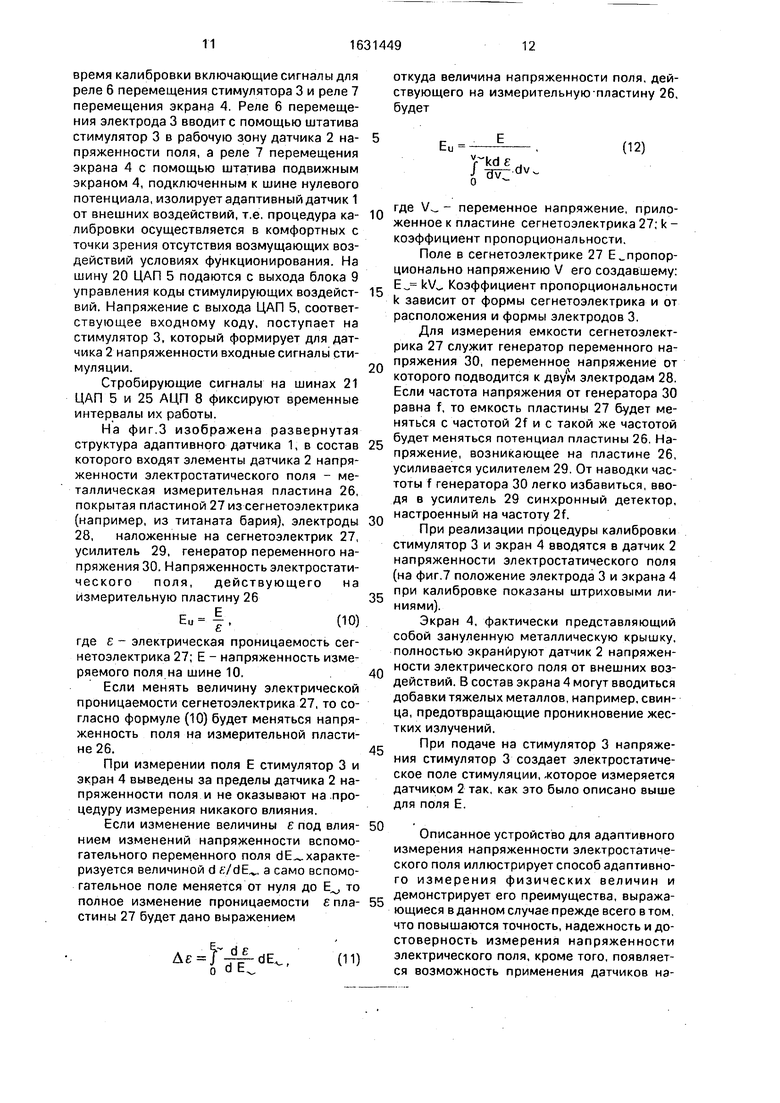
10 Структурная схема устройства для измерения напряженности электростатического поля в атмосфере, дополненного блоками и связями, реализующими способ, представлена на фиг.1 и содержит адаптив5 ный датчик 1 электростатического поля, в состав которого входит датчик 2 напряженности электростатического поля, стимулятор 3 (металлический электрод) и экран 4 внешних воздействий, цифроэналоговый
0 преобразователь (ЦАП) 5 стимулирующего воздействия, реле 6 перемещения электрода 3, реле 7 перемещения экрана 4, анало- гоцифровой преобразователь (ЦАП) 8 выходного сигнала датчика 1, блок 9 улрав5 ления измерением и калибровкой, входную шину 10 измеряемой величины - напряженности электростатического поля атмосферы, выходную шину 11 управляющих и синхронизирующих сигналов, выходную шину 12
0 кода измеренной величины, шину 13 механической связи электрода 3 и датчика 2, шину 14 стимулирующего воздействия на датчик 2, шину 15 механической связи экрана 4 и датчика 2, шину 16 напряжения (тока)
5 стимуляции, шину 17 механической связи реле 6 и электрода 3, шину 18 нулевого потенциала, шину 19 механической связи реле 7 и экрана 4, шину 20 кода стимулирующего воздействия, шину 21 стробирования, шину
0 22 сигнала включения реле 6, шину 23 сигнала включения реле 7, шину 24 выходного сигнала датчика 1, шину 25 стробирования, шину 26 коды выходного сигнала АЦП 8. Устройство функционирует следующим
5 образом.
Блок 9 вырабатывает на своих выходах заданную последовательность управляющих и синхронизирующих сигналов, а также кодов данных, необходимую для измерения
0 сигналов на шине 10.
Аналоговые сигналы с выхода адаптивного датчика 1 преобразуется АЦП 8 в коды, которые в процессе измерения и адаптивной калибровки запоминаются в оператив5 ном запоминающем устройстве блока 9 управления, обрабатываются и выдаются на шину 12 блока 9 управления совместно с сигналами на шине 11 для индикации.
В процессе калибровки адаптивного датчика 1 блок 9 управления формирует на
время калибровки включающие сигналы для реле 6 перемещения стимулятора 3 и реле 7 перемещения экрана 4. Реле 6 перемещения электрода 3 вводите помощью штатива стимулятор 3 в рабочую зону датчика 2 напряженности поля, а реле 7 перемещения экрана 4 с помощью штатива подвижным экраном 4, подключенным к шине нулевого потенциала, изолирует адаптивный датчик 1 от внешних воздействий, т.е. процедура калибровки осуществляется в комфортных с точки зрения отсутствия возмущающих воздействий условиях функционирования. На шину 20 ЦАП 5 подаются с выхода блока 9 управления коды стимулирующих воздействий. Напряжение с выхода ЦАП 5, соответствующее входному коду, поступает на стимулятор 3, который формирует для датчика 2 напряженности входные сигналы стимуляции.
Стробирующие сигналы на шинах 21 ЦАП 5 и 25 АЦП 8 фиксируют временные интервалы их работы.
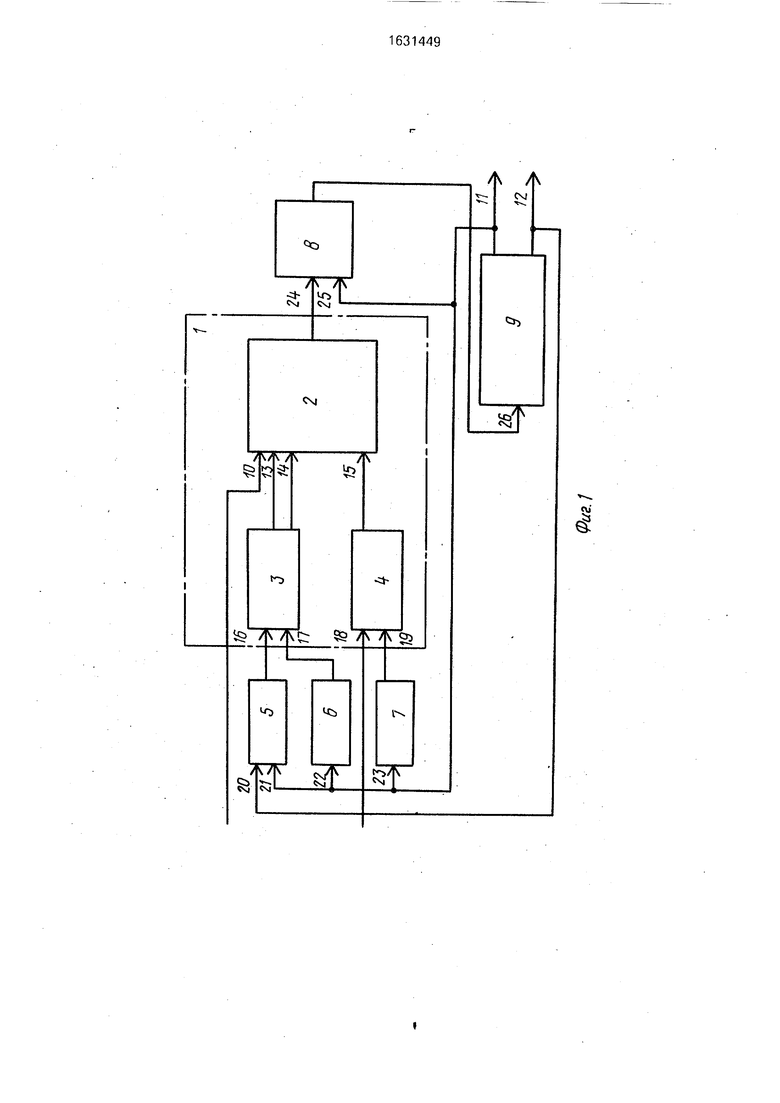
На фиг.З изображена развернутая структура адаптивного датчика 1, в состав которого входят элементы датчика 2 напряженности электростатического поля - металлическая измерительная пластина 26, покрытая пластиной 27 из сегнетоэлектрика (например, из титаната бария), электроды 28, наложенные на сегнетоэлектрик 27, усилитель 29, генератор переменного напряжения 30. Напряженность электростатического поля, действующего на измерительную пластину 26
(Ю)
где Ј - электрическая проницаемость сегнетоэлектрика 27; Е - напряженность измеряемого поля на шине 10.
Если менять величину электрической проницаемости сегнетоэлектрика 27, то согласно формуле (10) будет меняться напряженность поля на измерительной пластине 26.
При измерении поля Е стимулятор 3 и экран 4 выведены за пределы датчика 2 напряженности поля и не оказывают на процедуру измерения никакого влияния.
Если изменение величины Ј под влиянием изменений напряженности вспомогательного переменного поля dE характеризуется величиной d Ј/dE., а само вспомогательное поле меняется от нуля до Е, то полное изменение проницаемости Ј пластины 27 будет дано выражением
Г d Ј
,
dEA
(11)
откуда величина напряженности поля, действующего на измерительную-пластину 26, будет
kdЈ
3vT
(12)
dv.
0
5
0
где V - переменное напряжение, приложенное к пластине сегнетоэлектрика 27; k - коэффициент пропорциональности.
Поле в сегнетоэлектрике 27 Е „пропорционально напряжению V его создавшему: Е kVv Коэффициент пропорциональности k зависит от формы сегнетоэлектрика и от расположения и формы электродов 3.
Для измерения емкости сегнетоэлектрика 27 служит генератор переменного на- пряжения 30, переменное напряжение от которого подводится к двум электродам 28. Если частота напряжения от генератора 30 равна f, то емкость пластины 27 будет меняться с частотой 2f и с такой же частотой будет меняться потенциал пластины 26. Напряжение, возникающее на пластине 26, усиливается усилителем 29. От наводки частоты f генератора 30 легко избавиться, вводя в усилитель 29 синхронный детектор, настроенный на частоту 2f.
При реализации процедуры калибровки стимулятор 3 и экран 4 вводятся в датчик 2 напряженности электростатического поля (на фиг.7 положение электрода 3 и экрана 4
при калибровке показаны штриховыми линиями).
Экран 4, фактически представляющий собой зануленную металлическую крышку, полностью экранируют датчик 2 напряжен- ности электрического поля от внешних воздействий. В состав экрана 4 могут вводиться добавки тяжелых металлов, например, свинца, предотвращающие проникновение жестких излучений.
При подаче на стимулятор 3 напряжения стимулятор 3 создает электростатическое поле стимуляции, -которое измеряется датчиком 2 так, как это было описано выше для поля Е.
Описанное устройство для адаптивного измерения напряженности электростатического поля иллюстрирует способ адаптивного измерения физических величин и демонстрирует его преимущества, выражающиеся в данном случае прежде всего в том, что повышаются точность, надежность и достоверность измерения напряженности электрического поля, кроме того, появляется возможность применения датчиков напряженности электростатического поля со сравнительно невысокими метрологическими характеристиками,и следовательно, более простых и дешевых.
Формула изобре-тения 1. Способ адаптивного измерения физических величин, заключающийся в том, что на вход чувствительного органа датчика средства измерения последовательно подают сигналы измеряемой физической величины и стимулирующие сигналы той же природы, что и измеряемая физическая величина, определяют отклики средства измерения на сигналы измеряемой физической величины и эталонные сигналы, по полученным откликам и параметрам рабочей характеристики средства измерений измеряют физическую величину, отличающийся тем, что, с целью повышения точности, помехоустойчивости измерений,после подачи на вход чувствительного органа датчика средства измерения сигнала измеряемой физической величины запоминают первый отклик на выходе средства измерений, определяют значение первого прецизионного стимулирующего воздействия по формуле
А (х- b)/k,
где х - запомненное значение отклика средства измерений; b - первое значение смещения рабочей характеристики средства измерения; к - первое значение крутизны рабочей характеристики средства измерения, изолируют чувствительный элемент средства измерения от воздействий измеряемой физической величины, подают на его вход первое прецизионное стимулирующее воздействие и запоминают второй отклик на выходе средства измерения, определяют значение величины второго прецизионного стимулирующего воздействия по формуле
А (2 х-х - b)/k,
где х -- первый отклик на выходе средства измерения; х - второй отклик на выходе средства измерения, определяют разность между значениями первого и второго прецизионных воздействий, сравнивают абсолютное значение разности с заданным пороговым уровнем, в случае, если абсолютное значение разности не превышает заданное пороговое значение, повторяют воздействие на вход чувствительного датчика средства измерений измеряемой физической величиной и вновь определенным пер- 5 вым прецизионным стимулирующим воздействием до достижения заданной точности измерений физической величины, в случае, если абсолютное значение разности превышает заданное пороговое значение,
0 изолируют чувствительный элемент средства измерения от воздействия измеряемой физической величины и подают на его вход второе прецизионное стимулирующее воздействие и запоминают третий отклик на
5 выходе средства измерения, определяют вторые значения крутизны и смещения рабочей характеристики средства измерений по формулам
к (х - х)/(А -А)°,
0b (х А -х А/ (А -А),
где х - третий отклик на выходе средства измерений,используя значения крутизны и смещения рабочей характеристики средства измерений, повторяют воздействие на
5 вход чувствительного датчика средства измерений измеряемой физической величиной и первым прецизионным стимулирующим воздействием до достижения заданной точности измерений физической величины
0
2. Способ по п. 1,отличающийся тем, что, с целью повышения быстродействия измерений, до подачи на вход чувствительного датчика средства измерений
5 измеряемой физической величины подают на него первое и второе эталонные воздействия и запоминают отклики на первое и второе эталонные воздействия на выходе средства измерений, определяют первые
0 значения крутизны и смещения рабочей характеристики средства измерений по формулам
k ()/(,)v b (y Ai -у )/(Ai - Ai),
5 где k, b - первые значения крутизны и смещения рабочей характеристики средства измерения; у , отклики на первое и второе эталонные воздействия соответственно; At , AI, - значения величин первого и второ0 го эталонных воздействий соответственно.
Изпер.
/пекущего
значения
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ | 2016 |
|
RU2723887C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЛАЖНОСТИ ДРЕВЕСИНЫ | 2012 |
|
RU2504759C1 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА УГЛА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2114396C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА ТКАНИ И АППАРАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1995 |
|
RU2138192C1 |
| Система для разработки интеллектуального датчика | 2019 |
|
RU2714039C1 |
| МЕМБРАННОЕ ЗЕРКАЛО | 1984 |
|
SU1841109A1 |
| Способ определения допустимости использования феррозонда в магнитометре | 2020 |
|
RU2749303C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗМЕНЕНИЯ ТЕМПЕРАТУРЫ ОБЪЕКТА ОТНОСИТЕЛЬНО ЗАДАННОЙ ТЕМПЕРАТУРЫ | 2014 |
|
RU2549223C1 |
| Способ производственного контроля характеристики преобразования феррозонда | 2019 |
|
RU2723154C1 |
| Аналого-цифровой преобразователь с цифровой коррекцией погрешностей | 1978 |
|
SU788374A1 |
Изобретение относится к измерительной технике и приборостроению для измерения различных физических величин в условиях мешающих внешних воздействий и дестабилизирующих факторов. Целью изобретения является повышение точности помехоустойчивости и быстродействия измерений. Это достигнуто путем адаптивной периодической с достаточно высокой частотой повторения калибровки датчиков и измерительных устройств в течение всего времени измерения и автоматизации процесса коррекции результатов измерения. В способе адаптивного измерения физических величин осуществляется использование двух последовательно подаваемых эталонных или стимулирующих воздействий на каждом калибровочном такте. Согласно алгоритму, приведенному в описании, осуществляется итерационный процесс калибровки чувствительного датчика средства измерения и адаптивной коррекции результатов измерений. 1 з.п. ф-лы, 7 ил. Ё
Фиг, 2
Шина 10
18
У////////я гл
&
3 28
I А
s1
у
27
XV vOTWA
у
Фиг.З
ФигЛ
JT ДЛ
Ы
Хп Хп+1
п
i6n
п
/1
/
Z
An АЛ+/ЛЛ /ЛЯЛЛ Фиг. 5
A1
Фиг. 7
| Способ измерительного преобразования физической величины | 1980 |
|
SU924508A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Спектор С.А | |||
| Электрические измерения физических величин | |||
| Л.: Энергбатомиздат, 1987, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
