Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации электростатических гироскопов со сферическим ротором.
Известен способ калибровки датчика угла гироскопа (Инструкция по определению параметров датчика угла ДУ-4Ф. Прибор КФ2.567.360. - Предприятие ЦНИИ "Электроприбор", 1979). Способ реализуется при выполнении следующих операций:
1. Устанавливают статор датчика угла на неподвижной части приспособления. Подключают обмотки статора к источнику питания 40 В 400 Гц.
2. Устанавливают ротор датчика на подвижной части приспособления. Обмотки ротора подключают к измерительному прибору.
3. Включают питание датчика угла прибора и питание оптического датчика угла приспособления.
4. Осуществляют дискретные развороты ротора датчика на углы Xi= iΔx, где Δx = 5 угл. мин, i = 0, 1, 2,..., 24.
5. В каждом фиксированном положении осуществляют измерение выходного сигнала Ui датчика угла, определяют зависимость Ui = f(Xi) (калибровочную кривую).
6. Используя полученные результаты, рассчитывают параметры (крутизну, нелинейность выходной характеристики и т.д.) датчика угла.
Недостатком способа является малая точность. Указанный недостаток обусловлен тем, что калибровка датчика угла проводится в условиях, отличных от условий работы его в приборе.
Известен также способ калибровки датчика угла электростатического гироскопа ("Инструкция по проверке и контролю КФ2.562.098И2. - Предприятие ЦНИИ "Электроприбор", 1991), который принят за прототип.
Способ реализуется при выполнении следующих технологических операций:
1. Устанавливают гироскоп на платформе поворотного основания в положение, при котором продольная ось его корпуса перпендикулярна оси вращения платформы и параллельна оси вращения Земли, а одна из осей чувствительности, например OX, датчика угла параллельна оси вращения платформы.
2. Приводят гироскоп в рабочее состояние. Для этого взвешивают ротор в подвесе, разгоняют его до рабочей скорости, демпфируют нутационные колебания.
3. Приводят ось вращения ротора к продольной оси корпуса. В этом положении ось вращения ротора параллельна оси вращения Земли и из результатов измерений исключаются составляющие погрешности, обусловленные вращением Земли.
4. Осуществляют дискретные развороты платформы вместе с прибором на эталонные углы Xi= iΔx, где Δx - дискретность угла разворота в пределах заданного диапазона.
5. В каждом фиксированном положении измеряют угловое положение платформы и значение амплитуды сигнала Ux на первом выходе датчика угла (выходе, соответствующем оси OX чувствительности датчика). Определяют зависимость (калибровочную кривую) Uxi = f(Xi).
6. Производят разворот корпуса вокруг продольной оси на угол 90o. При этом вторая ось OY чувствительности датчика займет положение, параллельное оси вращения платформы.
7. Повторяют операции по пп. 4 и 5, разворачивая платформу с прибором на дискретные углы Yi= iΔY, где ΔY - дискретность угла разворота, и измеряя амплитуду сигнала на втором выходе датчика угла (выходе, соответствующем оси чувствительности OY), определяют зависимость (калибровочную кривую) UYi = f(Yi).
Далее полученные калибровочные зависимости вводятся в ЭВМ и используются при испытаниях и эксплуатации гироскопа (при обработке результатов измерений).
Недостатком способа является малая точность калибровки датчика угла.
Указанный недостаток обусловлен тем, что при калибровке датчика в результатах измерений (калибровки) присутствует составляющая погрешности, определяемая (вызванная) угловым движением ротора относительно корпуса. Это движение (дрейф) происходит под влиянием момента возмущений из-за технологических погрешностей, например, осевой разбалансировки ротора, неидеальной формы ротора и т.д., которые всегда присутствуют в реально изготавливаемых приборах.
Цель изобретения - повышение точности калибровки.
Указанная цель достигается тем, что в известном способе калибровки электростатического гироскопа дискретные развороты корпуса гироскопа осуществляют при его установке на платформе двухосного гиростабилизатора и включении в качестве чувствительного элемента путем поочередной подачи на вход усилителя-преобразователя соответствующей следящей системы гиростабилизатора эталонного сигнала в виде ступенчато изменяющегося напряжения, сравнивают во время подачи каждой ступеньки ее амплитуду с амплитудой сигнала датчика угла, а измерение углового положения платформы производят в момент достижения равенства этих амплитуд.
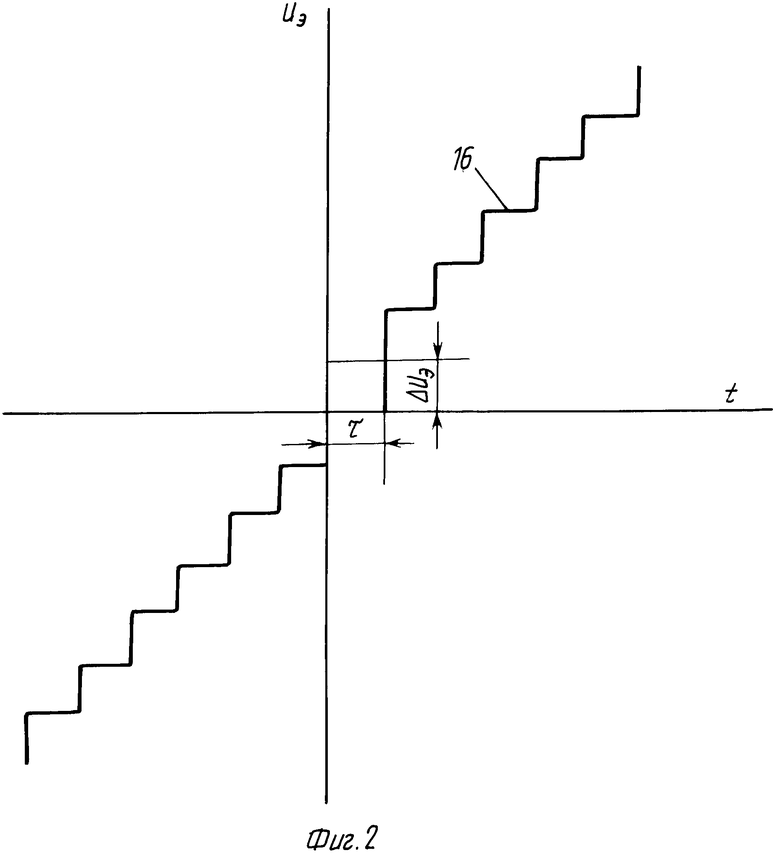
На фиг. 1 приведена принципиальная схема включения прибора для проведения испытаний; на фиг. 2 - график изменения эталонного напряжения. На фиг. 1 и 2 приняты следующие обозначения: 1 - электростатический гироскоп со сферическим ротором; 2 - платформа двухосного гиростабилизатора; 3 - датчик угла гироскопа; 3, 4 - суммирующий усилитель; 5, 9 - усилитель-преобразователь; 6 - наружное кардановое кольцо гиростабилизатора; 7, 10 - двигатель стабилизации; 11 - внутреннее кардановое кольцо; 12 - переключающее устройство; 13 - источник эталонного напряжения; 14, 15 - датчик угла платформы; 16 - кривая изменения эталонного напряжения на выходе источника 13; OXY - система координат, связанная с корпусом прибора; OXiYiZi - система координат, связанная с гиростабилизатором; OXpYpZp - система координат, связанная с ротором гироскопа; ωз - скорость вращения Земли; ωэ - амплитуда эталонного напряжения; ΔUэ - дискретность изменения амплитуды напряжения; t - время; τ - длительность ступеньки.
Предлагаемый способ реализуется при выполнении следующих технологических операций:
1. Электростатический гироскоп 1 (фиг. 1) устанавливают на платформе 2 двухосного гиростабилизатора в положение, при котором продольная ось OZ корпуса (не показан) перпендикулярна базовой (установочной) плоскости платформы 2, а оси чувствительностью OX, OY датчика 3 угла параллельны осям OXi, OYi вращения платформы 2 карданового подвеса.
2. Ориентируют гиростабилизатор в положение, при котором базовая плоскость платформы 2 перпендикулярна оси вращения Земли (продольная ось OZ корпуса гироскопа 1 параллельна оси вращения Земли).
3. Приводят гироскоп 1 в рабочее состояние. Для этого осуществляют взвешивание ротора в подвесе, разгоняют его до рабочей скорости, демпфируют нутационные колебания, приводят ось OZp его вращения к продольной оси корпуса. При этом ось вращения OZp ротора становится параллельной оси вращения Земли.
4. Приводят в рабочее состояние гиростабилизатор. Для этого замыкают две его следующие системы: первый выход (1) датчика 3 угла - суммирующий усилитель 4, первый усилитель - преобразователь 5 (усилитель 4 и усилитель 5 могут быть выполнены в одном блоке) - двигатель 7 стабилизации, установленный по оси OYi наружного карданового кольца 6 подвеса платформы 2, второй выход датчика 3 угла - второй суммирующий усилитель 8 - второй усилитель-преобразователь 9 - двигатель 10 стабилизации, установленный по оси OXi внутреннего карданового кольца 11 (совмещенно с платформой 2). При этом после замыкания следящих систем перемещение (дрейф) ротора относительно корпуса (из-за технологических погрешностей изготовления прибора i) исключается. Происходит отслеживание движения ротора разворотом корпуса с помощью соответствующих двигателей стабилизации.
5. По второму входу суммирующего усилителя 4 через переключатель 12 подсоединяют источник 13 эталонного напряжения (напряжение на выходе источника изменяется ступеньками с регулируемой дискретностью изменения амплитуды и регулируемой длительностью ступеньки).
6. Замыкают цепь источника 13 эталонного напряжения. При этом на двигатель 7 через усилители 4 и 5 поступает ступенька напряжения амплитудой Uэ= ΔUэ (фиг. 2) и длительностью τ. При подаче ступеньки напряжения на двигатель 7 происходит разворот платформы 2 с корпусом относительно ротора вокруг оси OYi наружного кольца.
7. Одновременно с разворотом корпуса осуществляют измерение амплитуды UXi выходного сигнала датчика 3 угла и амплитуды Uэ ступеньки. Производят сравнение амплитуд.
8. В момент достижения равенства амплитуд осуществляют измерение углового положения (угла αi ) платформы 2 (измерение сигнала датчика угла 14).
9. Повторяют операции по пп. 6 - 8, осуществляя ступенчатое изменение эталонного напряжения на входе усилителя 4. При этом дискретность изменения амплитуды эталонного напряжения определяют, исходя из заданной (требуемой) дискретности определения калибровочной кривой, длительность - исходя из максимального времени установления равенства амплитуд сигнала на входе усилителя 4. В результате выполнения указанных операций получают зависимость (калибровочную кривую) αi= f(Uдуii) = f(Uэтi).
10. Осуществляют переключение источника 13 на второй вход суммирующего усилителя 8.
11. Повторяют операции по пп. 6 - 9, определяя зависимость (калибровочную кривую) βi= f(Uэтi) = f(Uду2i).
В результате выполнения предлагаемых операций осуществляется калибровка угла электростатического гироскопа, при этом из результатов измерений (калибровки) исключается погрешность, обусловленная перемещением ротора относительно корпуса. Точность калибровки повышается. Поставленная цель достигнута.
На предприятии ЦНИИ "Электроприбор" предлагаемый способ проверен, получены положительные результаты. В настоящее время разрабатывается техническая документация, в которой этот способ будет использоваться при производстве электростатических гироскопов со сферическим ротором.
Технико-экономическая эффективность изобретения заключается в повышении точности гироскопа, что в свою очередь ведет к повышению точности инерциальных систем, в которой он используется.
В связи с отсутствием сведений о потребностях промышленности в таких гироскопах экономический эффект изобретения подсчитать не представляется возможным.
Использование: в области прецизионного приборостроения при производстве и эксплуатации электростатических гироскопов со сферическим ротором. Сущность изобретения: ось вращения ротора гироскопа ориентируют параллельно оси вращения Земли. Дискретно поворачивают корпус гироскопа последовательно вокруг двух его экваториальных осей, параллельных осям чувствительности датчика. Дискретные развороты корпуса осуществляют при установке гироскопа на платформе двухосного гиростабилизатора и включении его в качестве чувствительного элемента гиростабилизатора путем поочередной подачи на вход усилителя - преобразователя соответствующей следящей системы гиростабилизатора эталонного сигнала в виде ступенчато изменяющегося напряжения. Во время подачи каждой ступеньки сравнивают ее амплитуду с амплитудой сигнала датчика угла гироскопа и при достижении равенства этих амплитуд измеряют угловое положение платформы. 2 ил.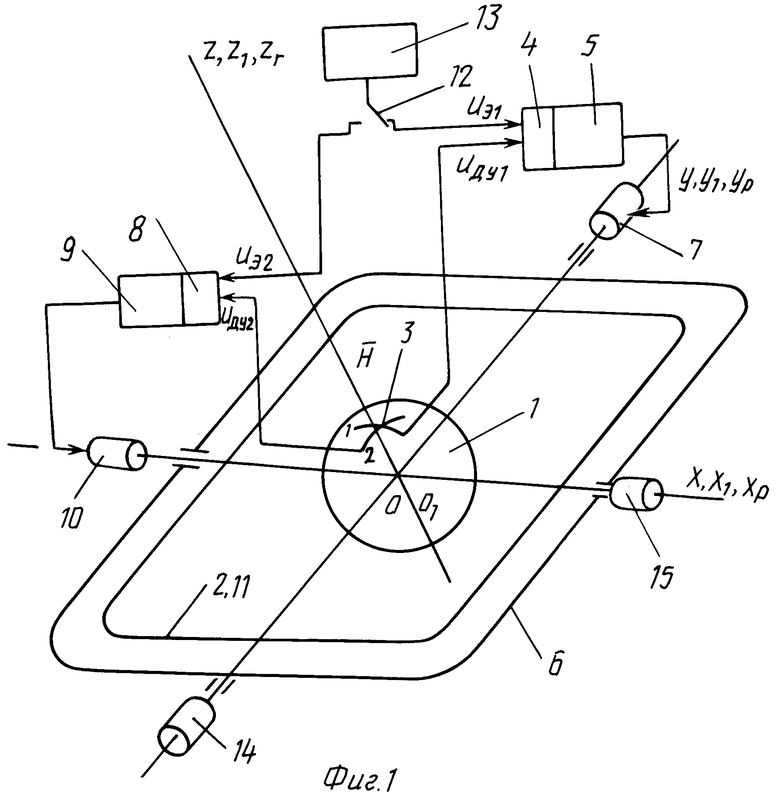
Способ калибровки датчика угла электростатического гироскопа, заключающийся в ориентации оси вращения ротора гироскопа параллельно оси вращения Земли, в дискретных разворотах корпуса последовательно вокруг двух его экваториальных осей, параллельных осям чувствительности датчика, измерениях углового положения платформы и сигналов датчика угла гироскопа, отличающийся тем, что дискретные развороты корпуса осуществляют при установке гироскопа на платформе двухосного гиростабилизатора и включении его в качестве чувствительного элемента гиростабилизатора, путем поочередной подачи на вход усилителя-преобразователя соответствующей следящей системы гиростабилизатора эталонного сигнала в виде ступенчато изменяющегося напряжения, причем во время подачи каждой ступеньки производят сравнение ее амплитуды с амплитудой сигнала датчика угла гироскопа, а измерение углового положения платформы производят в момент достижения равенства этих амплитуд.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Предприятие ЦНИИ "Электр оприбор", 1991. | |||

