Изобретение относится к машиностроению, а именно к конструкциям механических прессов.
Цель изобретения - повышение надежности.
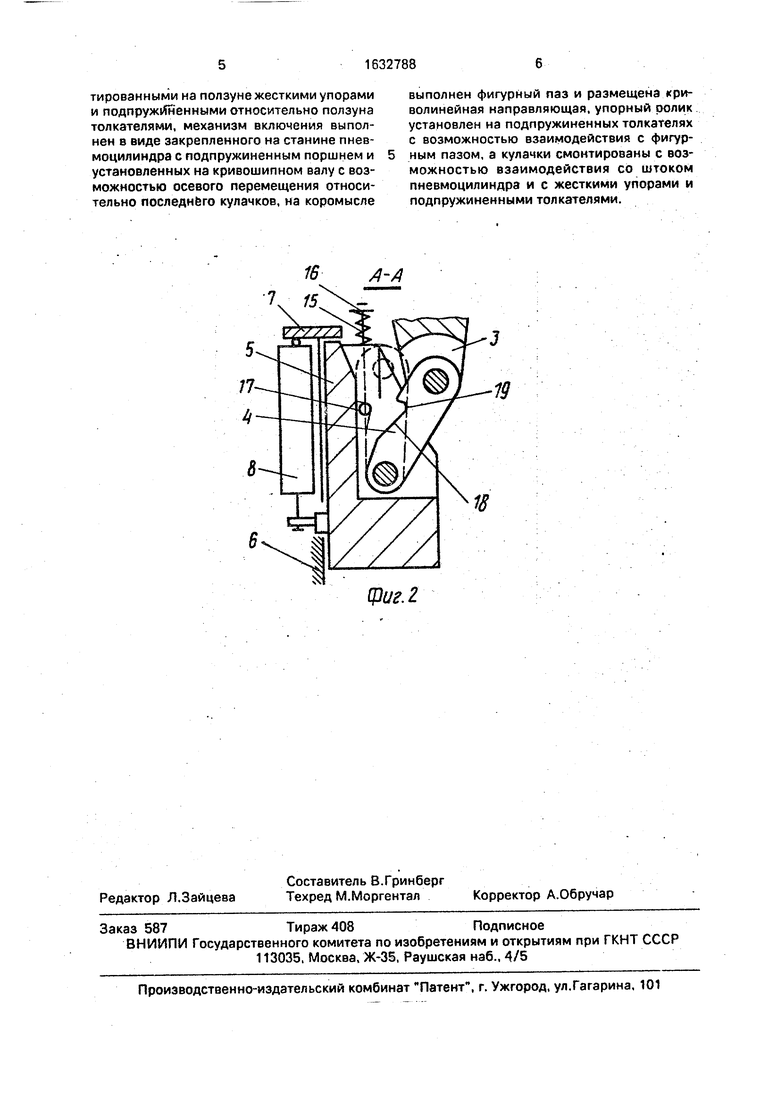
На фиг. 1 показана схема механического пресса; на фиг. 2 - сечение А-А на фиг. 1.
Механический пресс содержит станину
1,в которой смонтирован кривошипный вал
2,соединенный посредством двух шарнир- но связанных звеньев - шатуна 3 и коромысла 4 с ползуном 5, установленным в направляющих 6 станины 1. Ограничитель 7 хода ползуна 5 и уравновешиватель 8 также закреплены на станине 1. Механизм вклю- чения выполнен в виде пневмоцилиндра 9, жестко закрепленного на станине 1, с подпружиненным относительно него пружиной
10 поршнем 11 со штоком 12, взаимодействующим с кулачками 13. Последние установ- лены на кривошипном валу 2 с возможностью осевого перемещения относительно вала 2. Пресс снабжен установленными на ползуне 5 жесткими упорами 14 и подпружиненными относительно ползуна 5 посредством пружин 15 толкателями 16. На подпружиненных толкателях 16 установлен упорный ролик 17, взаимодействующий с криволинейной направляющей 18 и фигурным пазом 19, выполненными на коромысле 4. Кулачки 13 в зависимости от их положения могут взаимодействовать соответствен- но с жесткими упорами 14 или подпружиненными толкателями 16.
Механический пресс работает следую- щим образом.
В исходном состоянии ползун 5 поднят уравновешивателем 8 в свое верхнее положение и прижат ограничителем. Пневмоци- линдр 9 отключен, а его шток 12 и кулачки 13 пружиной 10 переведены в крайнее левое положение. В этом положении кулачки 13 взаимодействуют с подпружиненными толкателями 16, несущими упорный ролик 17. Вращение кривошипного вала 2 обеспе- чивается от привода (не показан}. При холостом ходе вращение вала 2 преобразуется в качательное движение коромысла 4 относительно ползуна 5, который удерживается в верхнем положении у ограничителей 7 урав- новешивателем 8, При этом, когда коромысло 4 поднимается и стремится занять вертикальное положение (при прохождении кривошипа валом 2 крайнего верхнего положения) кулачки 13 набегают на толкатели 16 и опускают упорный ролик 17, который, контактируя с криволинейной направляющей 18 на коромысле 4, препятствует случайному замыканию коромысла 4 на ползуне 5. Для перевода пресса из холостого в рабо-
чий режим в цилиндр 9 подается энергоноситель и его шток 12 переводит кулачки 13 из левого в крайнее правое положение. В этом положении кулачки 13 взаимодействуют с жесткими упорами 14. Вращением вала 2 кулачки 13 сдвигают ползун 5 вниз от ограничителей 7 на величину, при которой шатун 3 и коромысло 4 получают возможность расположения на одной прямой вдоль оси пресса, когда кривошип находится в верхнем положении. При этом упорный ролик 17 поднят пружинами 15 в верхнее положение и заскакивает в фигурный паз 19, фиксируя коромысло 4 относительно ползуна 5, Таким образом, исполнительный механизм преобразуется в кривошипно-ползунный и вращение вала 2 преобразуется в возвратно-поступательное движение ползуна 5, т.е. пресс включается в рабочий режим.
Перевод пресса в холостой режим осуществляется отключением цилиндра 9. При этом под действием пружины 10 через шток 12 пневмоцилиндра 9 кулачки 13 переводятся в левое положение, где они взаимодействуют с подпружиненными толкателями 16. При подходе кривошипа 2 к верхнему положению кулачки 13 набегают на толкатели 16, опускают их вместе с упорным роликом 17, который выходит из профильного паза 19 и расклинивается между ползуном 5 и криволинейной направляющей 18, что приводит к отклонению коромысла 4 на угол больше критического угла передачи движения между шатуном 3 и коромыслом 4. Тогда ползун 5 поджимается к ограничителям 7 уравновешивателем 8, а исполнительный механизм преобразуется из кривошипно-ползунного в шарнирный четырехзвенник. Таким образом пресс переводится из рабочего режима в холостой. Кинематическая связь перемещения ползуна 5 в момент включения с поворотом кривошипного вала 2 однозначно определяв состояние исполнительного механизма и обеспечивает мягкие (безударные) режимы включения и выключения.
Экономический эффект при внедрении изобретения получается за счет повышения надежности.
Формула изобретения Механический пресс, содержащий установленный в направляющих станины ползун, соединенные с кривошипным валом посредством двух шарнирно связанных звеньев, шатуна и коромысла, механизм включения, ограничитель хода ползуна и упорный ролик, установленный с возможностью контакта с криволинейной направляющей, отличающийся тем, что, с целью повышения надежности/ он снабжен смонтированными на ползуне жесткими упорами и подпружиненными относительно ползуна толкателями, механизм включения выполнен в виде закрепленного на станине пнев- моцилиндра с подпружиненным поршнем и установленных на кривошипном валу с возможностью осевого перемещения относительно последнего кулачков, на коромысле
выполнен фигурный паз и размещена криволинейная направляющая, упорный ролик установлен на подпружиненных толкателях с возможностью взаимодействия с фигурным пазом, а кулачки смонтированы с возможностью взаимодействия со штоком пневмоцилиндра и с жесткими упорами и подпружиненными толкателями.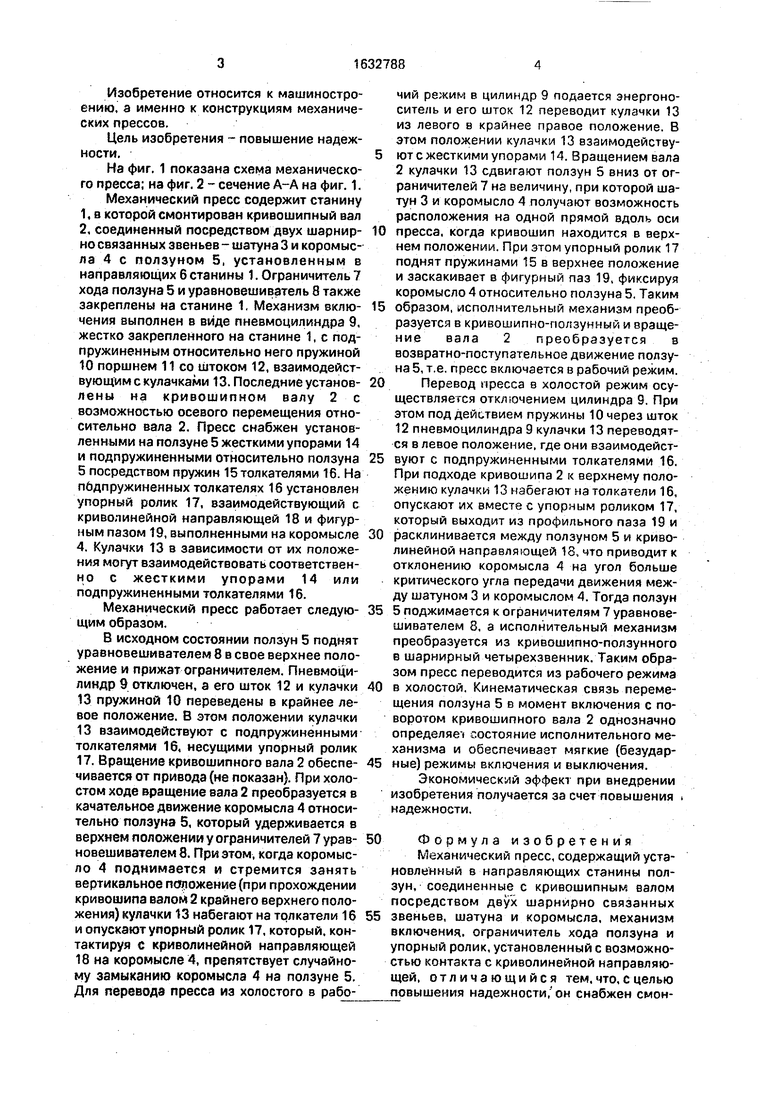
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКИЙ ПРЕСС | 2001 |
|
RU2217314C2 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 1976 |
|
SU671162A1 |
| Силовой орган механического пресса | 1980 |
|
SU893572A1 |
| Безмуфтовый механический пресс | 1990 |
|
SU1796481A1 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 1976 |
|
SU671164A1 |
| Механический пресс | 1976 |
|
SU606739A1 |
| Безмуфтовой механический пресс | 1991 |
|
SU1774921A3 |
| Система управления механического пресса | 1970 |
|
SU366674A1 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 1976 |
|
SU646545A1 |
| Механический пресс с нижним приводом | 1980 |
|
SU899369A1 |
Изобретение относится к машиностроению, а именно к конструкциям механических прессов. Цель изобретения - повышение надежности. В станине 1 пресса смонтирован кривошипный вал 2, соединенный посредством шатуна 3 и коромысла 4 с ползуном5. Механизм включения выполнен в виде закрепленного на станине 1 лневмоцилиндра 9 с подпружиненным поршнем 11 и штоком 12. Последний взаимодействует с кулачками 13, установленными с возможностью .осевого перемещения относительно кривошипного вала 2. На ползуне 5 установлены жесткие упоры 14 и подпружиненные толкатели 16, на которых «-, закреплен упорный ролик 17. На коромысле 4 выполнены фигурный паз и криволинейная направляющая. При выключенном пнев- моцилиндре 9 шток 12 и кулачки 13 находятся в левом положении. При этом кулачки 13 при вращении вала взаимодействуют с подпружиненными толкателями 16, которые вместе с упорным роликом 17 смещаются вниз. Коромысло 4 и шатун 3 совершают качательное движение. Ползун 5 уравновешивателями прижат к ограничителям 7 хода ползуна и неподвижен. При включении пневмоцилиндра 9 шток 12 и кулачки 13 перемещаются в правое положение. Кулачки 13 в крайнем верхнем положении кривошипа перемещают, воздействуя на жесткие упоры 14, ползун 5 вниз. Коромысло 4 и шатун 3 выстраиваются в одну линию. Упорный ролик 17 фиксирует коромысло 4 относительно ползуна 5. Совершается рабочий ход. При отключении пневмоцилиндра 9 кулачки 13 взаимодействуют с подпружиненными толкателями 16. Упорный ролик 17 выходит из фигурного паза коромысла 4 и, воздействуя на криволинейную направляющую, отклоняет коромысло 4 и отключает ползун пресса. 2 ил. е О 00 S3 00 00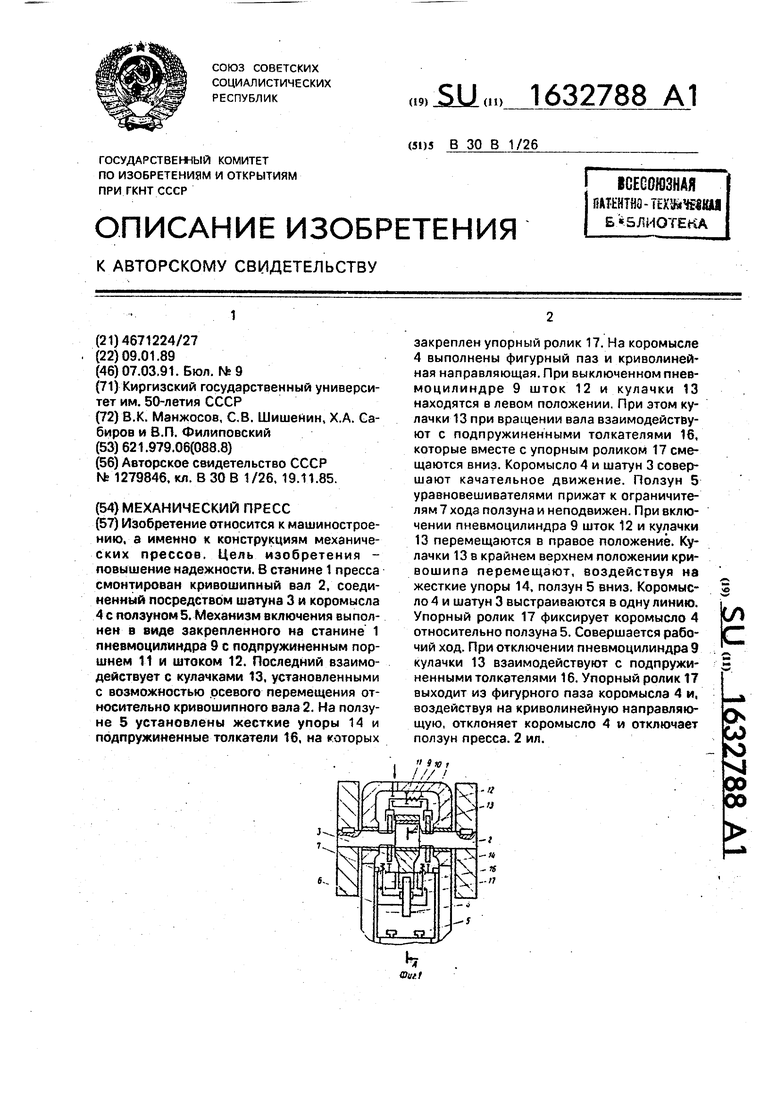
А-А
18
Щие.2
| Механический безмуфтовый пресс | 1985 |
|
SU1279846A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
