Изобретение относится к контрольно-измерительной технике и может быть использовано в машиностроении для определения параметров колебаний упругих систем.
Целью изобретения является повышение точности за счет уменьшения влияния на результат измерения нелинейности и петли гистерезиса характеристики упругого элемента системы.
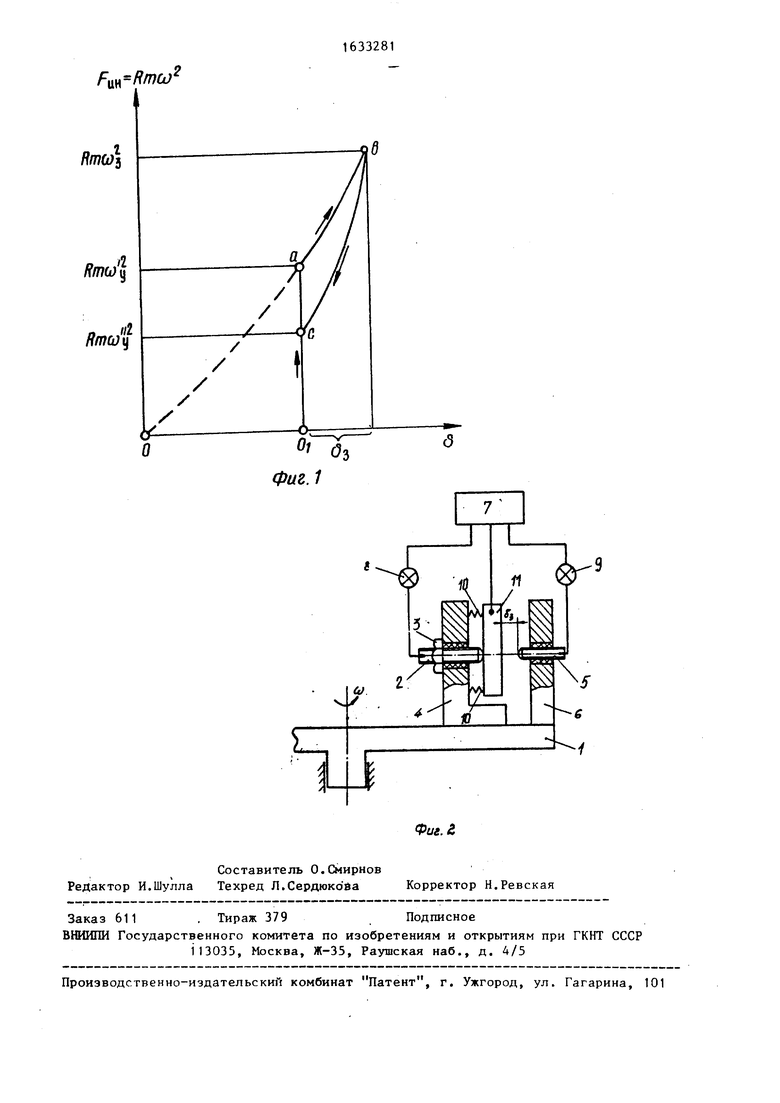
На фиг. 1 представлена диаграмма нагружения упругой системы; на фиг.2 - схема устройства для осуществления предлагаемого способа.
Способ определения собственной частоты упругой системы заключается в том, что осуществляют с помощью жесткого упора предварительную деформацию упругой системы в направлении ее статического смещения, закрепляют упругую
316
систему на центрифуге на радиусе R с возможностью перемещения в радиальном направлении от оси центрифуги, плавно увеличивают угловую скорость центрифуги, фиксируют значение СОи угловой скорости центрифуги, соответствующее предварительному смещению (моменту снятия системы с упора), фиксируют при дальнейшем увеличении скорости центрифуги ее значение 00, соответствующее заданному статическому смещению определяют собственную частоту
Ј упругой системы из соотношения
1
щ
(GjJ-G&R
Т,
(1)
Способ основан на использовании линеаризованной жесткости, определяемой (фиг. 1) как отношение ДГИИ Мо , где - сила нагружения упругой
системы (в данном случае сила инерции) ; - статическое смещение системы (величина деформации). Конкретизация согласно способу значений предварительной деформации и статического смещения L позволяет значительно уменьшить погрешность линеаризации жесткости упругой системы. Обеспече- ние предварительной деформации с помощью жесткого упора также способствует повышению точности, так как при статическом смещении упругой системы действует только ее собственная сила упругости (упор считается абсолютно жестким),
Для упругих систем со значительным демпфированием, т.е. для тех, у кото- рых характеристика упругого элемента имеет заметную петлю гистерезиса, имеет место погрешность, связанная с неоднозначностью параметра G)u, соответствующего одному и тому же значению статического смещения (фиг. 1, i точки а и с). В способе по п. 2 фор- мулы устраняется также и указанная погрешность. После фиксирования значения СОч угловую скорость центрифуги плавно снижают, а значение СО уг- ловой скорости центрифуги фиксируют в момент .постановки упругой системы на жесткий упор (фиг. 1, точка с), статическое смещение о« задают равным удвоенной амплитуде колебаний системы на собственной частоте, опреде- i ленной, например, расчетным путем.
Выбор величины и, равной удвоенной амплитуде колебаний, приближает условия определения собственной частоты к
условиям нагружения упругой системы при колебаниях, что также способствует повышению точности.
Соотношение (1) получают следующим образом. Сила энерции Рин определяется известным соотношением
F«H - Rmu,
где m - сосредоточенная масса упругой
системы;
G) - угловая скорость центрифуги. Ра-зность сил инерции при СО COi, и
Ј уравновешивается силой Гц уп ругости системы°
с V
где с - линеаризованная жесткость упругой системы при статическом смещении О .
Тогда, учитывая (2) и (3)
С учетом известного соотношения
получают
0
5
,
0 .
0
5
-
UЈ(u})R
|- т, . - 1fly
Устройство (фиг. 2) содержит центрифугу 1, винт 2 с гайкой 3, установленные на столе центрифуги 1 с помощью кронштейна 4 и электрически изолированные от последнего, регулируемый микрометрический винт 5, также установленный на столе центрифуги 1 с помощью второго кронштейна 6 и также электрически изолированный от кронштейна 6, при этом винты 2 и 5 расположены соосно один навстречу другому и радиально по отношению к оси вращения центрифуги, источник 7 питания, две лампочки 8 и 9, каждая из которых соединена с винтами 2 или 5 соответственно и соответствующим выходом источника 7 питания.
Устройство работает следующим образом.
Упругую систему, состоящую, например, из упругих элементов 10 (например, шброизоляторов) и сосредоточенной массы 11 (например, защищаемого объекта) помещают на стол центрифуги 1 таким образом, чтобы перемещение происходило в радиальном направлении относительно оси вращения центрифуги 1. Винтом 2 обеспечивается предварительная деформация упругой системы, после чего винт 2 контрится гайкой 3. После этого с помощью регулируемого микрометрического винта 5 устанавли-. вают заданное пермещение 8 , равное, например, удвоенному значению амплитуды колебаний упругой системы на собственной частоте.
Массу 11 электрически соединяют с общей клеммой источника 7 питания. Затем включают центрифугу 1 и плавно повышают скорость вращения. Момент снятия системы с жесткого упора (винта 2) определяют по индикатору разры- ва электрической цепи (в момент погасания лампочки 8, включенной в электрическую цепь с источником 7 питания, массой 11 и винтом 2). В момент погасания лампочки 8 фиксируют значение угловой скорости (0,. . При дальнейшем повышении скорости определяют по индикатору наличие тока в электрической цепи (по загоранию лампочки 9, включенной в электрическую цепь с источником 7 питания, массой 11 и винтом 5 в момент, когда перемещение упругой
системы достигло значения
V
В этот
момент фиксируют значение 63. Затем скорость вращения снижают и в момент загорания лампочки 8 фиксируют значение угловой скорости Ои. По полученным данным с помощью соотношения (1) определяют собственную частоту
ормула
изобретения
r
1. Способ определения собственной частоты упругой системы, заключающийся в том, что закрепляют упругую систему на центрифуге на радиусе R, увеличивают угловую скорость центрифуги до получения заданного статического смещения $. системы, фиксируют значение б), угловой скорости центрифуги, соответствующее значению й , по значению COi угловой скорости центрифуги определяют собственную частоту упру- гол системы, отличающийся тем, что, с целью повышения точности, осуществляют с помощью жесткого упора предварительную деформацию упругой системы в направлении ее статического
0 смещения, при изменении угловой скорости центрифуги фиксируют также ее значение Ј0., соответствующее предварительной деформации, а собственную частоту Ј0 упругой системы определяют
5 из соотношения
1 huJ-e R
Го 2fl| -$} -
2. Способ по п. отличающийся тем, что статическое смещение о 1 задают равным удвоенной амплитуде колебаний системы на собственной
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИКИ УПРУГОЙ СИСТЕМЫ | 1990 |
|
RU2009461C1 |
| Способ определения собственной частоты упругой системы прибора | 1982 |
|
SU1107006A1 |
| Способ определения собственной частоты упругой системы | 1988 |
|
SU1635012A1 |
| Способ определения собственных частот приборов | 1990 |
|
SU1795305A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК АМОРТИЗАТОРОВ ПРИ ВИБРАЦИОННОМ ВОЗДЕЙСТВИИ | 2006 |
|
RU2323426C1 |
| Аэростатический измеритель линейных перемещений | 2024 |
|
RU2829305C1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| ВИБРОИЗОЛЯТОР НИЗКОЧАСТОТНЫЙ БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ РАЗГРУЖЕННЫЙ (ВНБГР) | 2012 |
|
RU2506473C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2013 |
|
RU2540432C1 |
Изобретение относится к контрольно-измерительной технике. Целью изоб.ретения является повышение точности за счет уменьшения влияния на результат измерения нелинейности и петли гистерезиса характеристики упругого элемента системы. Способ осуществляется путем измерения угловых скоростей центрифуги, на которой на радиусе закреплена предварительно сдеформированная упругая система с различными значениями статического смещения. Показано, что значение собственной частоты упругой системы связано с измеряемыми параметрами соотношением f0 1 I (Ог-ОйЖ Ј Т Где заданное статическое смещение упругой систе,. мы; Сд)} и CDu- угловые скорости центрифуги, соответствующие моменту снятия упругой системы с жесткого упора и соответственно заданному значению Сущность способа состоит в использовании линеаризованной жесткости упругой системы. Конкретизация значений предварительной деформации и статического смещения позволяет значительно уменьшить погрешность линеаризации. Использование для предварительной деформации жесткого упора способствует повышению точности, т.к. в этом случае действует только собственная сила упругости системы. Способ по п. 2 отличается значением ij, равным удвоенной амплитуде колебаний упругой системы на собственной частоте и тем, что значение СОи соответствует момен) ту постановки упругой системы на жесткий упор. Способ позволяет устранить также и погрешность, связанную с неоднозначностью параметра CGu, соответствующего одному и тому же значению статического смещения, что характерно для систем со значительным демпфированием. 1 з.п.ф-лы, 2 ил. Ф (Л а со со ISD 00
упругой системы. При этом используютчастоте, определенной, например, рас /1 / JJ
значение СО
0)
ju если характеристи-четным путем, после фиксирования знака упругого элемента системы не име-чения ffl/i угловую скорость центрифуги
ет заметной петли гистерезиса, либоплавно снижают, а значениеСОиугловой
зн ачение 03 Щ., если петлей гистере- скорости центрифуги фиксируют в мозиса пренебречь по условиям измерения о мент постановки упругой системы на недопустимо.жесткий упор.
Fm Rma}2
| Способ определения собственной частоты упругой системы прибора | 1982 |
|
SU1107006A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
