Изобретение относится к измерительной технике и может быть использовано для измерения абсолютных значений линейных перемещений.
Цель изобретения - повышение точности измерения путем исключения операций определения параметров преобразователя и линеаризации выходной характеристики преобразователя.
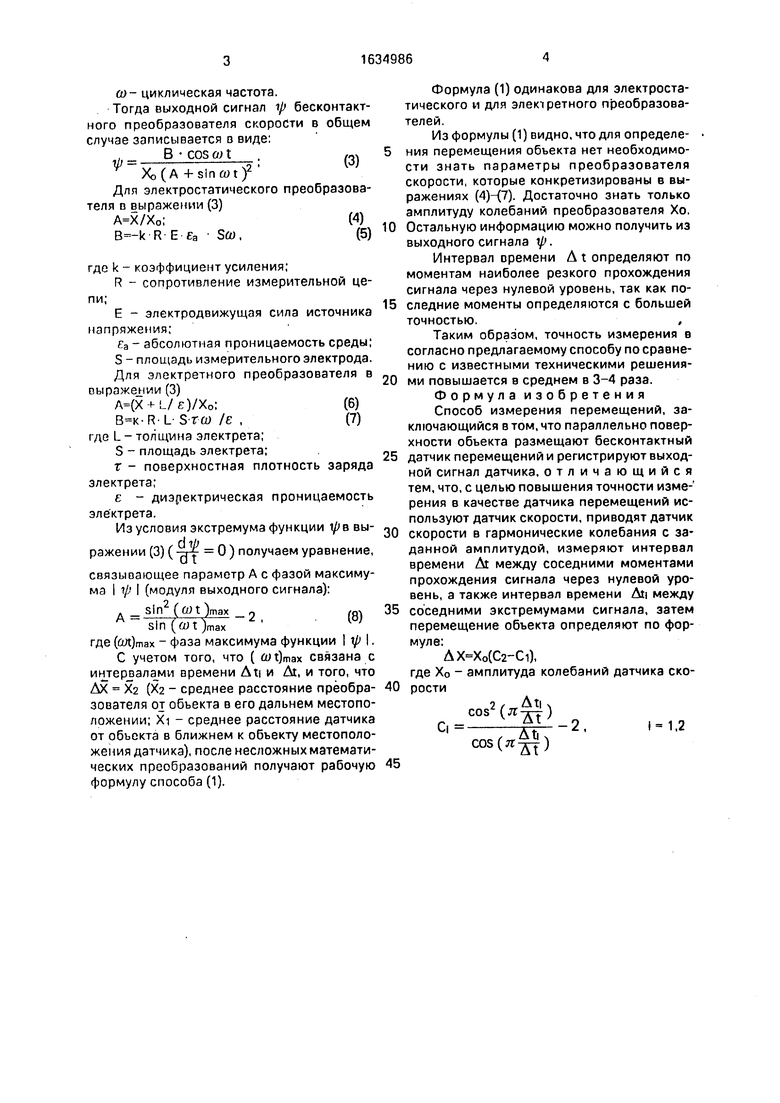
На фиг. 1 изображена структурная схема для реализации способа; на фиг. 2 - характерный выходной сигнал бесконтактного датчика скорости.
Способ осуществляется следующим образом.
Параллельно исследуемой поверхности объекта 1 размещают бесконтактный преобразователь 2 скорости. С помощью вибратора 3 приводят преобразователь 2 скорости в гармонические колебания с заданной амплитудой Х0. Регистрируют выходной сигнал V преобразователя 2 скорости, характерный ход которого изображен на фиг. 2, в измерительной цепи 4. Измеряют
интервал времени At между соседними моментами наиболее резкого прохождения сигнала через нулевой уровень. Измеряют интервал времени Ati между дальними соседними моментами достижения сигналом экстремального значения. Следят за изме- нением интервала времени Ati. Перемещение Д X объекта определяют по начальному и конечному значениям Л ti (,2) с по- мощью формулы
(C2-Ci);(1)
где Хо - заданная амплитуда механических колебаний преобразователя скорости;
со
С
Os
CJ
Јь
ю
00
о
cos
Ci
, Ati ч (
cos (л:-5)
l 1,2
Пусть расстояние между преобразователем скорости и поверхностью объекта изменяется по синусоидальному закону:
+ ,(2)
где X - среднее расстояние;
а)- циклическая частота.
Тогда выходной сигнал if) бесконтактного преобразователя скорости в общем случае записывается в виде:
B-cospt(3)
Г Xo(A+sinwt)2
Длл электростатического преобразователя в выражении (3)
А Х/Х0;(4)
R E Еа SCO,(5)
где k - коэффициент усиления;
R - сопротивление измерительной цепи;
Е - электродвижущая сила источника напряжения;
Ја - абсолютная проницаемость среды;
S - площадь измерительного электрода.
Для электретного преобразователя в выражении (3)
A(X + L/Ј)/X0;(6)
L- STO) /E ,(7)
где L - толщина электрета;
S - площадь электрета;
г - поверхностная плотность заряда электрета;
е - диэлектрическая проницаемость эле ктрета.
Из условия экстремума функции ty в выражении (3) ( -т-Ј 0 ) получаем уравнение,
связывающее параметр А с фазой максимума I t/j I (модуля выходного сигнала):
SlrT (йП)тах
2 ,
(8)
Sin (Wtjmax
где (ал)тах - фаза максимума функции . С учетом того, что ( m)max связана с интер лами времени Ati и At, и того, что ДХ Ха (Х2 - среднее расстояние преобразователя от объекта в его дальнем местоположении; Xi - среднее расстояние датчика от объекта в ближнем к объекту местоположения датчика), после несложных математических преобразований получают рабочую формулу способа (1).
Формула (1) одинакова для электростатического и для элеюретного преобразователей.
Из формулы (1) видно, что для определе5 ния перемещения объекта нет необходимости знать параметры преобразователя скорости, которые конкретизированы в выражениях (4)-(7). Достаточно знать только амплитуду колебаний преобразователя Хо.
10 Остальную информацию можно получить из выходного сигнала р.
Интервал времени Д t определяют по моментам наиболее резкого прохождения сигнала через нулевой уровень, так как по15 следние моменты определяются с большей точностью.,
Таким образом, точность измерения в согласно предлагаемому способу по сравнению с известными техническими решения20 ми повышается в среднем в 3-4 раза. Формула изобретения Способ измерения перемещений, заключающийся в том, что параллельно поверхности объекта размещают бесконтактный
25 датчик перемещений и регистрируют выходной сигнал датчика, отличающийся тем, что, с целью повышения точности измерения в качестве датчика перемещений используют датчик скорости, приводят датчик
30 скорости в гармонические колебания с заданной амплитудой, измеряют интервал времени At между соседними моментами прохождения сигнала через нулевой уровень, а также интервал времени Ati между
35 соседними экстремумами сигнала, затем перемещение объекта определяют по формуле:
(C2-Ci), где Х0 - амплитуда колебаний датчика ско40 рости
соз2(я|Н)
С|
45
соз(я)
-2,
1 1.2
о 2
J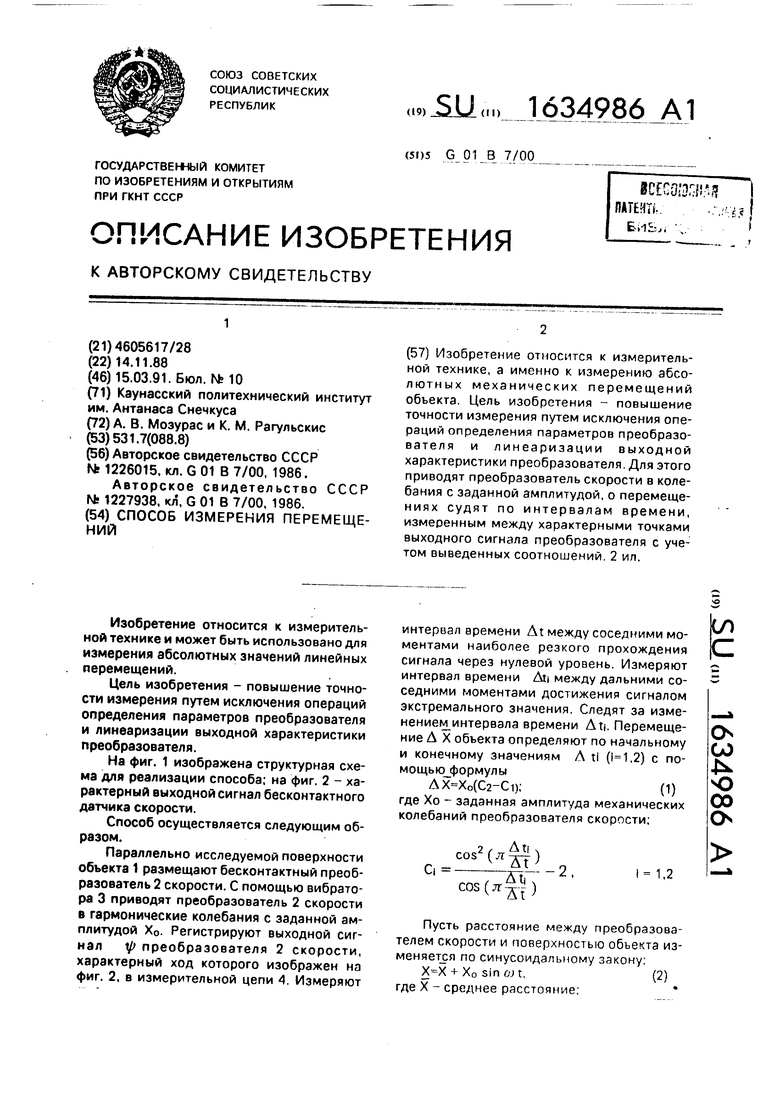
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения амплитуды механических колебаний объекта | 1989 |
|
SU1791727A1 |
| Способ измерения вибраций | 1990 |
|
SU1753293A1 |
| Способ определения амплитуды механических колебаний | 1988 |
|
SU1689762A1 |
| Способ измерения вибраций | 1990 |
|
SU1753296A1 |
| Способ измерения вибраций | 1990 |
|
SU1753295A1 |
| Способ определения амплитуды механических колебаний объекта | 1987 |
|
SU1430762A1 |
| Способ определения амплитуды механических колебаний | 1986 |
|
SU1330474A1 |
| Способ измерения поверхностной плотности заряда электрета | 1989 |
|
SU1652946A1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ДЛИНЫ ВОЛНОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2037141C1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2371714C2 |
Изобретение относится к измерительной технике, а именно к измерению абсолютных механических перемещений объекта. Цель изобретения - повышение точности измерения путем исключения операций определения параметров преобразователя и линеаризации выходной характеристики преобразователя. Для этого приводят преобразователь скорости в колебания с заданной амплитудой, о перемещениях судят по интервалам времени, измеренным между характерными точками выходного сигнала преобразователя с учетом выведенных соотношений. 2 ил.
Фм.1
At
О
Фиг. 2
i
| Дифференциальный емкостный датчик линейных перемещений | 1984 |
|
SU1226015A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения перемещений | 1984 |
|
SU1227938A1 |
