ряют сигнал, пропорциональный виброскорости объекта, в двух точках на нормали к его поверхности, расстояние между которыми известно и равно Ах. В каждом местоположении датчика регистрируют сигнал в измерительной цепи и фиксируют моменты достижения сигналами экстремальных значений.
Условно принимают любой экстремум обоих сигналов за первый и измеряют интервалы времени Ati между моментами первого и п-го экстремумов каждого сигнала (n-четное число, rvj4), Для сигнала, соответствующего ближней от поверхности объекта точке расположения датчика, измеряют также интервал времени At между моментами первого и (п+1)-го экстремумов. Затем определяют амплитуду хо механических колебаний объекта по формуле
х0 - Дх/(С2 - Ci),0)
где
Ci
2-cos -1)
()
Индекс относится к ближней точке размещения датчика, 2 - к дальней точке.
5 случае применения любого бесконтактного датчика перемещения с выходной харёктеристикой f (х) Н (А + x)k, где H,A,k - константы преобразования,
х - расстояние между датчиком и объектом, производят дифференцирование по времени выходного сигнала датчика и выполняют аналогичные операции, как и в случае использования датчика скорости.
Амплитуду колебаний определяют по формуле (1), где коэффициенты О вычисляются следующим образом:
.2 /Аи 2 At
k -f 1 - k cos
Cr
г
1
11
(Ь1)
(2)
Указанную выходную характеристику имеют многие бесконтактные датчики перемещения, например емкостные, индуктивные, электронные и др.
Пример. Для измерения механических колебаний используют бесконтактный датчик скорости электронного типа (электрофторопластовый). Сначала размещают датчик в ближней точке от вибрирующей поверхности объекта на расстоянии 10 мкм. Регистрируют ток в измерительной цепи датчика. Выбирают число п равным . Измеряют интервалы времени A ti и A t.
Затем с помощью микрометра увеличивают расстояние датчика от объекта (А ), регистрируют ток в измерительной цепи датчика, установленного в этой точке, и измеряют интервал времени At2. Затем вычисляют значения коэффициентов Ci и определяют по формуле (1) амплитуду механических колебаний.
Применение предлагаемого способа
позволяет повысить точность определения амплитуды механических колебаний по сравнению с известным примерно на 40%.
15
Формула изобретения
1, Способ определения амплитуды механических колебаний объекта, заключающийся в том, что с помощью бесконтактного датчика скорости, расположенного параллельно объекту, измеряют сигнал, пропорциональный виброскорости объекта, в двух точках на нормали к его поверхности, расстояние между которыми равно Ах, регистрируют оба сигнала, фиксируют моменты достижения сигналами экстремальных значений и определяют амплитуду колебаний, отличающийся тем, что, с целью повышения точности определения амплитуды механических колебаний путем увеличения отношения сигнал/шум, принимают
любой экстремум обоих сигналов за первый и измеряют интервалы времени Ati между моментами первого и п-го эстремумов каждого сигнала (n-четное, п 4), а для сигнала, соответствующего ближней от поверхности
объекта точке расположения датчика, измеряют также интервалы времени A t между моментами первого и (п+1)-го экстремумов и определяют амплитуду х0 механических колебаний по формуле
(C2-Ci),
(&- )
(Ј- )
где Ci
где относится к ближней точке; - к дальней точке.
2. Способ по п.1,отличающийся тем, что, с целью расширения класса применяемых датчиков, измерение сигнала, пропорционального виброскорости объекта, осуществляют с помощью бесконтактного датчика перемещения, функция преобразо- вания которого имеет вид f (х) Н/(А + x)k, где H.A.k - константы преобразования, х - расстояние между датчиком и объектом, с последующим дифференцированием вы
ходного сигнала датчика по времени, а амплитуду колебаний определяют по формуле х0 tfx/(C2 - С1),
где Ci
)
(Ц-1)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения вибраций | 1990 |
|
SU1753295A1 |
| Способ измерения вибраций | 1990 |
|
SU1753296A1 |
| Способ измерения вибраций | 1990 |
|
SU1753293A1 |
| Способ измерения перемещений | 1988 |
|
SU1634986A1 |
| Способ измерения амплитуды механических колебаний объекта | 1989 |
|
SU1791727A1 |
| Способ определения амплитуды механических колебаний объекта | 1987 |
|
SU1430762A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТНЫХ ХАРАКТЕРИСТИК МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ | 2003 |
|
RU2237884C1 |
| Способ определения параметров вибрации | 1989 |
|
SU1753271A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВИБРИРУЮЩИХ ОБЪЕКТОВ | 1991 |
|
RU2009452C1 |
| Способ Щурова измерения скорости механических колебаний объекта | 1989 |
|
SU1716321A1 |
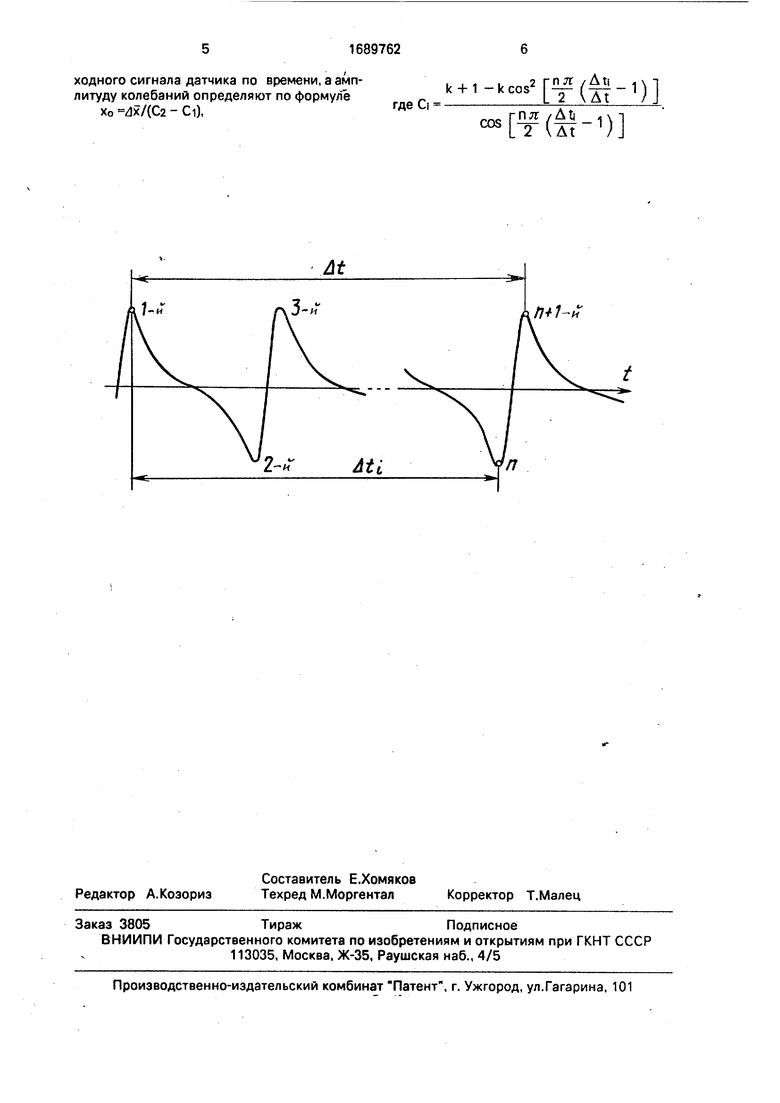
Изобретение относится к измерительной технике и может быть использовано для измерения параметров механических колебаний. Целью изобретения является повышение точности определения амплитуды механических колебаний путем увеличения отношения сигнал/шум и расширение класса применяемых датчиков. Для реализации способа бесконтактный датчик скорости устанавливают параллельно вибрирующей поверхности объекта последовательно в двух точках на нормали к его поверхности, расстояние между которыми равно Ах. В каждой точке расположения датчика измеряют сигнал, пропорциональный виброскорости объекта, регистрируют оба сигнала и фиксируют моменты достижения сигналами экс Изобретение относится к измерительной технике и может быть использовано для измерения параметров механических колебаний. Цель, изобретения - повышение точности определения амплитуды механических колебаний путем увеличения отношения тремальных значений. Далее принимают любой экстремум обоих сигналов за первый и измеряют интервалы времени Ati между моментами первого и п-го экстремумов каждого сигнала (n-четное, п Ј4), а для сигнала, соответствующего ближней от поверхности объекта точке расположения датчика, измеряют также интервал времени A t между моментами первого и (п+1)-го экстремумов и определяют амплитуду х0| механических колебаний по формуле х0 А х/(С2 - Ci), где индекс I 1 относится к ближней точке, а i 2 - к дальней). С целью расширения класса применяемых датчиков измерение сигнала, пропорционального виброскорости объекта, осуществляют с помощью бесконтактного датчика перемещения, функция преобразования которого имеет вид f (х) H/(A+x)k, где H.A.k - константы преобразования; х - расстояние между датчиком и объектом, производят дифференцирование по времени выходного сигнала датчика и выполняют аналогичные операции, как и в случае использования датчика скорости. Затем определяют амплитуду колебаний по формуле х0 - Ci). 1з,п. ф-лы, 1 ил. сигнал/шум и расширение класса применяемых датчиков. На чертеже изображена схема реализации выходного сигнала датчика скорости. Способ реализуют следующим образом. С помощью бесконтактного датчика скорости, расположенного параллельно вибрирующей поверхности объекта, измеЁ О 00 О ч ON Ю
| Способ определения амплитуды механических колебаний объекта | 1987 |
|
SU1430762A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
