Изобретение относится к измерительной технике и может быть использовано для определения параметров механических колебаний при испытаниях.
Известен способ измерения амплитуды механических колебаний с помощью датчиков скорости, в которых об амплитуде судят по максимальным значениям выходного сигнала датчика скорости.
Недостатком способов является неучет нелинейных искажений, низкое отношение сигнал/шум, а также невозможность определения абсолютного значения амплитуды при неизвестных параметрах датчика.
Наиболее близким к предлагаемому является способ измерения амплитуды, в котором учтены келйнейные искажения. Однако в этом способе необходимо размещение датчика скорости в двух местоположениях, неравноотдаленных от поверхности исследуемого объекта: в ближнем и в дальнем.
В ближнем местоположении датчика экстремумы выходного сигнала, по которым определяются интервалы времени, являются наиболее остро выраженными. При отдалении датчика форма сигнала приближается к гармонической, т.е. экстремумы теряют острый характер, следовательно, и точность измерения информативных интервалов времени уменьшается. И, так как амплитуда механических колебаний рассчитывается по интервалам времени, измеренным в обоих местоположениях датчика, одновременно уменьшается точность ее определения; Недостатком прототипа являете низкая точность.
Целью изобретения является повышение точности,
Цель достигается тем, что размещают бесконтактный датчик скорости параллельно исследуемому объекту, регистрируют сигнал в измерительной цепи, об амплитуде колебаний судят по интервалам времени, измеренным между характерными точками выходного сигнала датчика скорости, при этом предварительно приводят датчик скорости в гармонические колебания с заданной амплитудой Х0 зад., измеряют интервал времени Ati между дальними соседними
ел
с
Х|
ю
V4 Ю VI
моментами достижения сигналом своего экстремального значения, а также интервал времени At2 между соседними моментами наиболее резкого прохождения сигнала через нулевой уровень, после чего выключают колебания датчика скорости, возбуждают колебания исследуемого объекта, измеряют интервал времени АТ.З между дальними со- седнйМй,Цементами достижения сигналом своего экстремального значения и интервал времени между софдними моментами наиболее ЙкЦгё Прохождения сигнала через нулевой уровень, а амплитуду механических колебаний обьекта определяют по формуле.
ХогХэзздХ ,2 t „ At I
At3
co()23-cos() ,..-.. X()-2.-cos(). 0)
Сущность йзобретёйия заключается в том, что при измерении характерных интервалов времени в одном (ближнем) местопо- ложёШи датчика и определении амплитуды колёбэнийрбъекта по выведенному соотношению (1) достигается максимальная проч- ность, так как в ближнем местоположении датчика экстремумы выходного сигнала вы- ражзются наиболее ярко. Кроме .того, при этом исключается; погрешность измерения из-за непараллельного размещения датчика во втором местоположении (что имеет место в прототипе)..
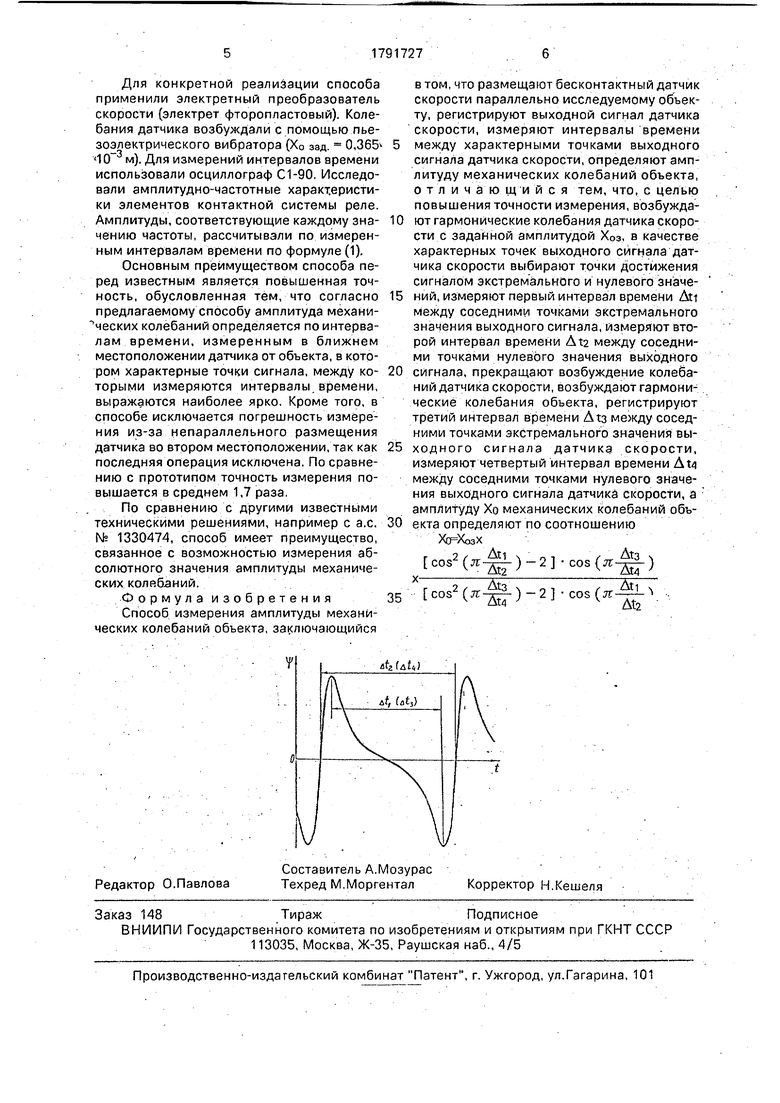
На чертеже представлен выходной сигнал датчика...
Способ осуществляется следующим образом , -.. -... , .
Размещают бесконтактный датчик ско- рости параллельно исследуемому объекту. Приводят датчик скорости в гармонические колебания с вектором виброперемещения, перпендикулярным исследуемому объекту, и заданной амплитудой колебаний Х0 зад:,. регистрируют сигнал в измерительной цепи датчика скорости, Измеряют интервал вре- мениАг1 между дальй ймй соседними моментами достижения выходным сигналом
своёгб экстремального значения, а также
интервал времени At2 между соседними моментами наиболее резкого прохождения сигнала через нулевой уровень. Затем выключают колебания датчика скорости и возбуждают колебания исследуемого объекта. Аналогично измеряют интервал времени АТ.З между дальними соседними моментами достижения сигналом экстремального значения и интервал времени А Т4 между соседними моментами наиболее резкого прохождения сигнала через нулевой уровень. Амплитуду колебаний исследуемого объекта рассчитывают по формуле (1).
Пусть расстояние между преобразователем скорости и поверхностью объекта изменяется по синусоидальному закону:
X X + Xosinwt,(2) где X - среднее расстояние; Хо - амплитуда механических колебаний объекта; (а- цик1-. лическая частота. ;/,а« ч ;;;
Тогда выходной сигнал 1J) бесконтактного преобразователя скорости в общем случае записывается в виде:
V-:
B-cosort
Хэ(А +siruyt)2
В случае электростатического преобразователя (1): . , у. .:.,..,: у.-у;..: :-. .. .-: , .
А ,(4) ;.;.
B -KREЈaSu) ,..;.:,: .., ,;. ; (5) где К-коэффициент усиления; R-еопротив- ление в измерительной цепи; Е-электровозбуждающая сила источника напряжения; еа - абсолютная проницаемость среды; S - площадь измерительного электрода. ,: . В случае электретного преобразователя
(2): . .::;A (X + L/e)Xo,. (6) B KRLSa /e ,;- (7) где L - толщина электрета; S - площадь электрета; а- поверхностная плотность заряда электрета; в - диэлектрическая проницаемость электрета. ,
Из условия экстремума функции Ч в выС|Щ
ражёнии (3) ( л - 0) получаем уравнение,
связывающее параметр А с фаз.ой максимума W(модуля выходного сигнала):
д Sln2(ft)t)max -2
sln(on:)max где (ort)max-фаза максимума функции W.
С учетом того, что (ш t)max при колебаниях датчика с заданной амплитудой Х0 Зад. связана с интервалами времени Ati и At2, а при колебаниях объекта с исследуемой амплитудой Хо - с интервалами времени АТ.З и At4 , после несложных математических преобразований получаем рсчбочую форму- - лу способа (1).
Нужно отметить, что интервалы времени At2 и Ati определяют по моментам наиболее резкого прохождения сигнала через нулевой уровень, так как последние моменты определяются с большей точностью.
(8)
Для конкретной реализации способа применили электретный преобразователь скорости (электрет фторопластовый). Колебания датчика возбуждали с помощью пьезоэлектрического вибратора (Х0 зад. 0,365k 10 м). Для измерений интервалов времени использовали осциллограф С1-90. Исследовали амплитудно-частотные характеристики элементов контактной системы реле. Амплитуды, соответствующие каждому значению частоты, рассчитывали по измеренным интервалам времени по формуле (1).
Основным преимуществом способа перед известным является повышенная точность, обусловленная тем, что согласно предлагаемому способу амплитуда механи- ческих колебаний определяется по интервалам времени, измеренным в ближнем местоположении датчика от объекта, в котором характерные точки сигнала, между которыми измеряются интервалы времени, выражаются наиболее ярко. Кроме того, в способе исключается погрешность измерения из-за непараллельного размещения датчика во втором местоположении, так как последняя операция исключена. По сравнению с прототипом точность измерения повышается в среднем 1,7 раза.
По сравнению с другими известными техническими решениями, например с а.с. № 1330474, способ имеет преимущество, связанное с возможностью измерения абсолютного значения амплитуды механических колебаний.
Формула изобретения
Способ измерения амплитуды механических колебаний объекта, заключающийся
0
5
0
5
0
в том, что размещают бесконтактный датчик скорости параллельно исследуемому объекту, регистрируют выходной сигнал датчика скорости, измеряют интервалы времени между характерными точками выходного сигнала датчика скорости, определяют амплитуду механических колебаний объекта, отличающийся тем, что, с целью повышения точности измерения, возбуждают гармонические колебания датчика скорости с заданной амплитудой Хоз., в качестве характерных точек выходного сигнала датчика скорости выбирают точки достижения сигналом экстремального и нулевого значений, измеряют первый интервал времени Ди между соседними точками экстремального значения выходного сигнала, измеряют второй интервал времени At2 между соседними точками нулевого значения выходного сигнала, прекращают возбуждение колебаний датчика скорости, возбуждают гармонические колебания объекта, регистрируют третий интервал времени At3 между соседними точками экстремального значения выходного сигнала датчика скорости, измеряют четвертый интервал времени Дм между соседними точками нулевого значения выходного сигнала датчика скорости, а амплитуду Хо механических колебаний объекта определяют по соотношению
I cos2 (я)-2. cos (-||-)
At3
)(jr
Ж
At2
xv
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения перемещений | 1988 |
|
SU1634986A1 |
| Способ определения амплитуды механических колебаний объекта | 1987 |
|
SU1430762A1 |
| Способ определения амплитуды механических колебаний | 1988 |
|
SU1689762A1 |
| Способ измерения вибраций | 1990 |
|
SU1753296A1 |
| Способ измерения вибраций | 1990 |
|
SU1753295A1 |
| Способ измерения поверхностной плотности заряда электрета | 1989 |
|
SU1652946A1 |
| Способ измерения вибраций | 1990 |
|
SU1753293A1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПЕРИОДИЧЕСКИХ КОЛЕБАНИЙ | 1995 |
|
RU2098776C1 |
| Способ измерения поверхностной плотности заряда электрета | 1987 |
|
SU1531031A1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1991 |
|
SU1799512A3 |
Использование: изобретение относится к измерительной технике и может быть использовано для определения параметров механических колебаний при испытаниях. Сущность: с целью повышения точности измерения предварительно приводят датчик скорости в гармонические колебания с заданной амплитудой, измеряют временные интервалы времени, характерные для колебаний датчика и для объекта. По измеренным интервалам времени по математической зависимости определяют амплитуду механических колебаний объекта. 1 ил.
| Способ определения амплитуды механических колебаний объекта | 1987 |
|
SU1430762A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
