Наиболее близким к предлагаемому является способ измерения амплитуды х0 механических колебаний обьекте по напряжению на пьезоэлементе датчика, установленного на обьекте. Если вибрация объекта гармоническая, тогда виброперемещение изменяется по закону
х - x0sln( (о t).
(3)
Однако и в этом способе закон зависимости U от х считают линейном, т.е. в качестве расчетной формулы для определения Хо принимают формулу (1), и сталкиваются с систематической погрешностью измерения. Недостатком также является то, что нужно дополнительно определять параметры dsa. Ј , I, входящие в расчетную формулу (1), и низкое отношение С/Ш.
Цель изобретения - повышение точности путем учета нелинейностей.
Сущность изобретения заключается в том, что при дифференцировании по времени на пря кёния на пьезоэлементе, измерении характерных интервалов времени и определении х0 представляется возможность повысить точность из-за учета нелинейностей основной зависимости.
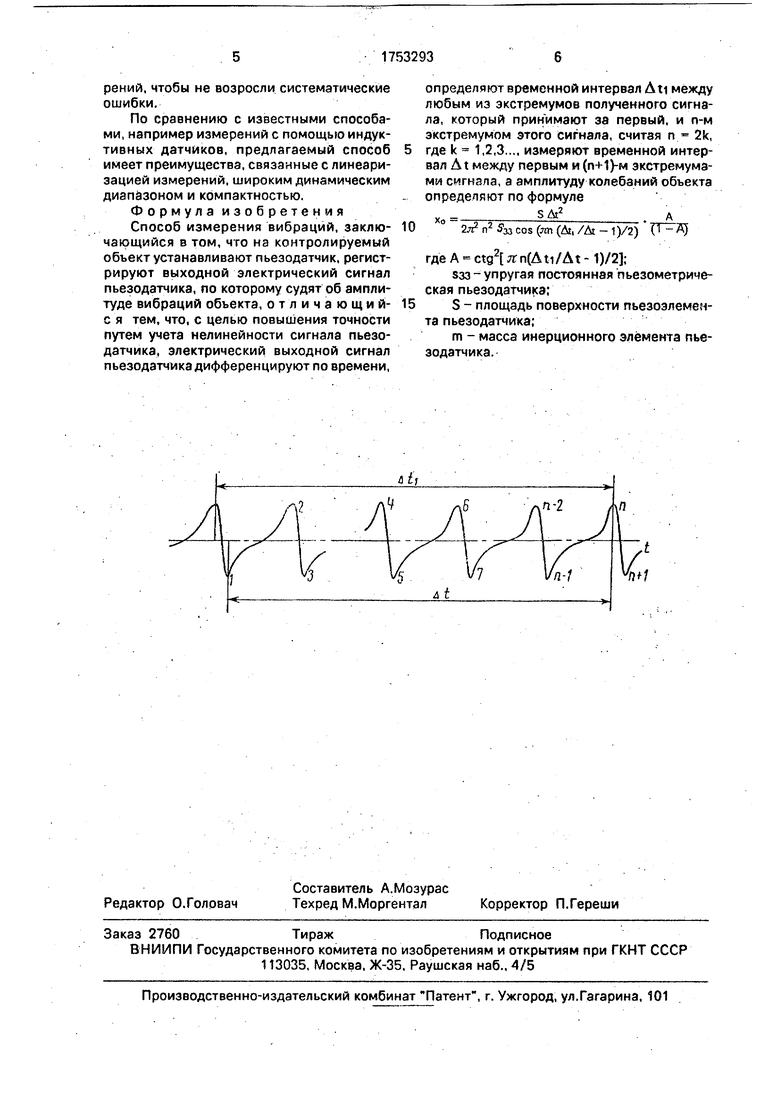
На чертеже представлен характерный ход информативного сигнала, полученного путем дифференцирования по времени напряжения пьезодатчика (2) при изменении виброперемощения по закону (3).
Способ осуществляют следующим образом.
Устанавливают пьезодатчик на вибрирующем объекте. Регистрируют выходной сигнал пьезоэлемента датчика. Информативный сигнал получают, дифференцируя по времени выходной сигнал пьезоэлемента. Условно принимают второй экстремум из любой пары ближних соседних экстремумов информативного сигнала за первый, из- меряют интервал времени Ati между первым и n-тым экстремумами {п - четное число, n 2) и интервал времени между первым и (п+1)-м экстремумами последнего сигнала, а амплитуду колебаний определяют по формуле
Хо
SAtz
2л2 n2 SNcos (лп (Дг, /fa -1)/2) ЛГ
где А - ctg2(jrn(Ati/At -1)/2;
S33 - упругая постоянная пьезоматери- ала датчика в направлении вибраций;
S - площадь поверхности пьеэоэлемен- та датчика;
m - масса инерционного элемента датчика.
Приведем вывод формулы (4). Пусть виброперемещение объекта изменяется по закону (3). Выражение(2) представляет зависимость напряжения
5 пьезоэлемента U от времени t. Дифференцируем (2) по времени t и получаем зависимость информативного сигнала от времени t. Для нахождения условия экстремума информативного сигнала еще раз дифферен10 цируем предыдущую зависимость по времени. Приравниваем в результате этого полученное выражение нулю и получаем соотношение, связывающее искомую амплитуду механических чолебаний х0 с фазой
15 максимума информативного сигнала (ft)t)max. Учитывая соотношения, связывающие фазу максимума информативного сигнала ()max с характерными интервалами времени Ati и Л t из предыдущего соотношения выражаем
20 х0 и получаем расчетную формулу способа (4).
В способе предусмотрена возможность
по большим интервалам времени (в смысле
того, что информация может быть получена
не только по одному, но и по любому числу
25 периодов информативного сигнала), определять х0, что также повышает точность измерений.
Для реализации способа использовался пьезодатчик на основе LiNbOa. Сиг нал пьезо30 элемента усиливался и дифференцировался по времени с помощью аналогового дифференциатора. Продифференцированный сигнал отображался на экране осциллографа. По характерным точкам информативного сигна35 ла с учетом данных развертки осциллографа измерялись интервалы времени Ati и At. Технические данные использованного пьезодатчика являются следующими: S м, m 5 кг, S33 4,9 . Лредла40 гаемый способ позволяет в широком ди- апазоне виброперемещений () м измерять вибрации.
Для определения х0 не надо дополнительно определять dsa, Ј , I, что видно из
45 рабочей формулы (4), в то время как в прототипе это необходимо.
В предлагаемом способе учтены нелинейности (исключены систематические по50 грешности прототипа), так как рабочая формула (4) выведена из (2) с учетом всех нелинейностей (без приближенных допущений), что повышает точность в среднем 3.5 раза.
55 Расширен динамический диапазон измерений, так как в предлагаемом способе соотношения точные, в то время как в прототипе из-за принятого допущения линейности ограничивают динамический диапазон измерений, чтобы не возросли систематические ошибки.
По сравнению с известными способами, например измерений с помощью индуктивных датчиков, предлагаемый способ имеет преимущества, связанные с линеаризацией измерений, широким динамическим диапазоном и компактностью.
Формула изобретения Способ измерения вибраций, заключающийся в том, ч го на контролируемый объект устанавливают пьезодатчик, регистрируют выходной электрический сигнал пьезодатчика, по которому судят об амплитуде вибраций объекта, отличающий- с я тем, что, с целью повышения точности путем учета нелинейности сигнала пьезодатчика, электрический выходной сигнал пьезодатчика дифференцируют по времени,
0
определяют временной интервал Д ti между любым из экстремумов полученного сигнала, который принимают за первый, и п-м экстремумом этого сигнала, считая n 2k, где k 1,2,3..., измеряют временной интервал At между первым и (п+1}-м экстремумами сигнала, а амплитуду колебаний объекта определяют по формуле
SAt2A
Хо
2л2 п2 5ззcos (лп (At,/At - 1 )/2) О Щ
где А ctg2 #n(Ati/At -1)
«аз-упругая постоянная пьезометрическая пьезодатчикэ;
S - площадь поверхности пьезоэлемен- та пьезодатчика;
m - масса инерционного элемента пьезодатчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения вибраций | 1990 |
|
SU1753295A1 |
| Способ измерения вибраций | 1990 |
|
SU1753296A1 |
| Способ измерения амплитуды механических колебаний объекта | 1989 |
|
SU1791727A1 |
| Способ измерения перемещений | 1988 |
|
SU1634986A1 |
| Способ определения амплитуды механических колебаний | 1988 |
|
SU1689762A1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ | 2014 |
|
RU2566418C1 |
| Способ определения акустических характеристик нитевидных объектов | 1991 |
|
SU1798678A1 |
| СПОСОБ ДИСТАНЦИОННОГО ПЕРИОДИЧЕСКОГО КОНТРОЛЯ КОЭФФИЦИЕНТА ПРЕОБРАЗОВАНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА | 2000 |
|
RU2176396C1 |
| Способ определения постоянной времени фотоприемника и устройство для его осуществления | 1988 |
|
SU1642442A1 |
| ИНДУКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2015 |
|
RU2600517C2 |
