Изобретение относится к электротехнике и может быть использовано при создании регулируемого электропривода на базе вентильного двигателя с высокими показателями качества регулирования.
Цель изобретения - повышение качества управления путем снижения бросков тока на период дискретности выпрямителя.
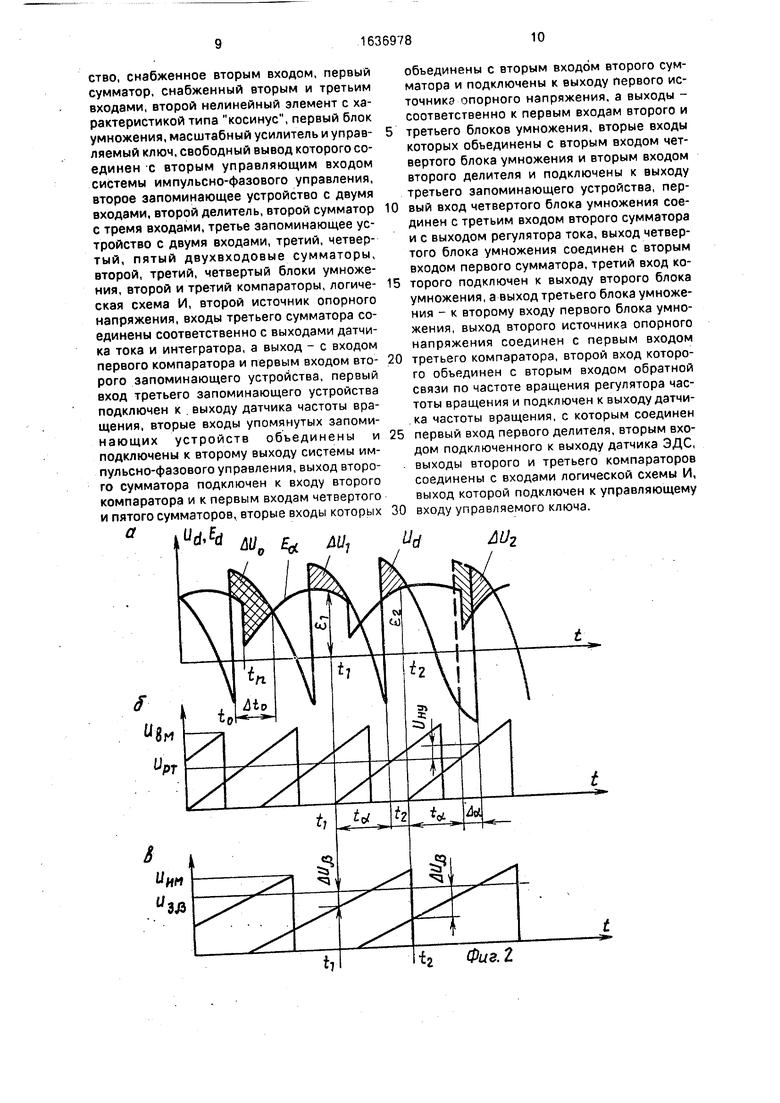
На фиг.1 представлена схема устройства для управления вентильным электродвигателем; на фиг,2 - диаграммы, поясняющие его работу.
Устройство для управления вентильным электродвигателем, выполненным на базе синхронной машины, содержит последовательно соединенные между собой управляемый выпрямитель 1, дроссель 2 и инвертор 3, m-фазный выход которого служит для подключения к m-фазной якорной обмотке син- хронной машины 4 двигателя, последовательно соединенные между собой задатчик5 частоты вращения, регулятор 6 частоты вращения, снабженный вторым входом обратной связи по частоте вращения, регулятор 7 тока, снабженный вторым входом, и систему 8 импульсного-фазового управления (СИФУ), выход которой подключен к управляющему входу управляемого выпрямителя. Датчик 9 тока установлен в выходной цепи управляемого выпрямителя 1 и выходом подключен к второму входу регулятора 7 тока. Вывод распределителя 10 импульсов подключен к управляющему входу инвертора 3,а вход- к выходу первого компаратора 11. Устройство содержит также интегратор 12 с шунтирующим его ключом 13 сброса. Вход интегратора 12 объединен с вторым входом обратной связи по частоте вращения регулятора 6 частоты вращения. К выходу инвертора 3 подключены входы нуль-органа 14, выход которого через элемент 15 временной задержки соединен с управляющим входом ключа 13 сброса интегратора 12. В состав устройства входит первый источник 16 опорного напряжения СИФУ 8 снабжена вторым управляющим входом и вторым выходом,
В устройство для управления вентильным электродвигателем введены датчик 17 частоты вращения для установки его ротора на валу синхронной машины 4, датчик ЭДС 18, включенный параллельно входу инвертора 3, последовательно соединенные между собой первый делитель 19, первый нелинейный элемент 20 с характеристикой типа арксинус, первое запоминающее устройство 21, снабженное вторым входом, последовательно соединенные первый сумматор 22, снабженный вторым и третьим входами, второй нелинейный элемент.23j;
характеристикой типа косинус, первый блок 24 умножения, масштабный усилитель 25 и управляемый ключ 26, свободный вывод которого соединен с вторым управляющим входом СИФУ 8, последовательно соединенные второе запоминающее устройство 27 с двумя входами, второй делитель 28 и второй сумматор 29 с тремя входами.
0 В устройство введены также третье запоминающее устройство 30 с двумя входами, третий 31, четвертый 32 и пятый 33 двухвходовые сумматоры, второй 34, третий 35 и четвертый 36 блоки умножения, второй
5 37 и третий 38 компараторы, логическая схема И 39 и второй источник 40 опорного напряжения,
Входы третьего сумматора 31 соедине-1 ны соответственно с выходами датчика 9
0 тока и интегратора 12, а выход - с входом первого компаратора 11 и первым входом второго запоминающего устройства 27. Первый вход третьего запоминающего устройства 30 подключен к выходу датчика 17
5 частоты вращения Вторые входы запоминающих устройств 21, 27 и 30 объединены и подключены к второму выходу СИФУ,
Выход второго сумматора 29 подключен к входу второго компаратора 37 и к первым
0 входам четвертого 32 и пятого 33 сумматоров, вторые входы которых объединены с вторым входом второго сумматора 29 и подключены к выходу первого источника 16 опорного напряжения, а выходы суммато5 ров 32 и 33 подключены соответственно к первым входам второго 34 и третьего 35 блоков умножения, вторые входы которых объединены с вторым входом четвертого блока 36 умножения и вторым входом вто0 рого делителя 28 и подключены к выходу третьего запоминающего устройства 30. Первый вход четвертого блока 36 умножения соединен с третьим входом второго сумматора 29 и выходом регулятора 7 тока.
5 Выход четвертого блока 36 умножения соединен с вторым входом первого сумматора 22, третий вход которого подключен к выходу второго блока 34 умножения, а выход третьего блока 35 умножения - к второ0 му входу первого блока 24 умножения.
Выход второго источника 40 опорного напряжения соединен с первым входом третьего компаратора 38, второй вход которого объединен с вторым входом обратной
5 связи по частоте вращения регулятора 6 частоты вращения и подключен к выходу датчика 17 частоты вращения, с которым соединен первый вход первого делителя 19, вторым входом подключенного к выходу датчика ЭДС 18, выходы второго 37 и третьего 38 компараторов подключены к входам логической схемы И 39, выход которой подключен к управляющему входу ключа 26.
Устройство работает следующим образом.
Регулирование тока двигателя осуществляется за счет воздействия на вход тири- сторного выпрямителя 1 управляющих импульсов распределителя импульсов СИ- ФУ 8, на первый вход которой поступает сигнал с выхода регулятора 7 тока. В регуляторе 7 тока осуществляется сравнивание сигналов Upc от регулятора 6 частоты вращения и сигнала обратной связи по току с выхода датчика 9 тока.
Регулирование частоты вращения двигателя осуществляется за счет воздействия на вход регулятора 7 тока импульсов с выхода регулятора 6 частоты вращения, на входе которого осуществляется сравнение сигналов задатчика 5 частоты вращения и сигнала обратной связи по частоте вращения с выхода Датчика 17частоты вращения. Формирование импульсов управления тиристорами инвертора 3 осуществляется цепочкой, состоящей из последовательно включенных интеграторов 12 с ключом 13 сброса, сумматора 31, компаратора 11 и распределителя 10 управляющих импульсов.
С целью обеспечения высоких управляющих энергетических показателей угол опережения / включения тиристоров инвертора 3 должен быть минимально возможным. Для этого второй вход сумматора 31 подключают к датчику 9 тока, а управляющий вход ключа 13 сброса через элемент 15 временной задержки подключается к выходу нуль-органа 14 фазных ЭДС двигателя.
В результате на входе сумматора 31 происходит сравнение сигналов от датчика 9 тока и пилообразного напряжения Уйм с выхода интегратора 12. Изменение напряжения на входе интегратора 12 пропорционально изменению частоты вращения двигателя, обеспечивает необходимое изменение наклона пилообразного напряжения UHM и определяется величиной обратной связи датчика 17 частоты вращения.
В момент синхронизации (ti, t2, фиг.2) СИФУ 8 с сетью с помощью блока синхронизации, на втором выходе которого формируются импульсы синхронизации, запоминающим устройством 21 фиксируется величина
фо arcsln.e (t)/Kф ,
которая вычисляется с помощью датчика ЭДС 18, на выходе которого формируется
сигнал, пропорциональный е (t), датчика 17 частоты вращения, делителя 19с коэффициентом усиления, равным 1/Кф , и нелинейного элемента 20 типа арксинус.
Запоминающим устройством 30 фиксируется напряжение с выхода датчика 17 частоты вращения, пропорциональное частоте вращения двигателя. Запоминающим устройством 27 фиксируется значение
AU , пропорциональное разности напряжений U зЛ на втором входе сумматора
31 и напряжения с выхода интегратора 12:
ди и3/з-имин.
Это напряжение делится делителем 28 на величину, пропорциональную частоте напряжения, и подается на первый вход сумматора 29, на второй вход которого с выхода
регулятора 7 тока поступает напряжение Upr (фиг.2), а на третий вход - выходное напряжение источника 16. Коэффициенты усиления по входам сумматора выбраны таким образом, что на выходе сумматора формируется напряжение, пропорциональное At ttt + tfl-AtЈ (UPT + UA-K1 AU )Ka,
0
где t a время задержки управляющего импульса выпрямителем;
1д - время дискретности выпрямителя, для m 3 т.д 0,003 с;
ид Kitfl - напряжение источника 16 опорного сигнала
At Л время остановившегося до переключения тиристоров инвертора, At AU/ -K2/Ki ;
KI и К2 - коэффициенты усиления интеграторов 12 и СИФУ.
0Если выходная величина сумматора Ato 0,
это означает, что а период дискретности выпрямителя (Aio 0, фиг.2а) произойдет коммутация, вызывающая скачкообразное изменение кривой ЭДС инвертора Ed (t). При этом скач5 кообразно увеличивается ее среднее значение за период дискретности A to (A U0 A U), что вызывает значительное увеличение тока двигателя.
При Ato 0 на выходе компаратора 37
0 формируется логическая 1й, поступающая на первый вход логической схемы И 39, на второй вход которой подается сигнал с выхода компаратора 38, сравнивающего текущее значение частоты вращения с
5 синхронной со с , пропорциональной напряжению источника 40 опорного напряжения. При на выходе компаратора 38 и втором входе схемы И 39 формируется логическая Г.
При наличии на входах двух логических 1 замыкается ключ 26, который подключает к второму входу СИФУ 8 выход масштабного усилителя 25.
На выходе масштабного усилителя 25 формируется напряжение UMy, величина которого определяется с помощью элементов 22 - 25, 36 и 16 согласно выражению
К a sin л/т п , и„у УКьКг-u/2(Ud-AU K)X
rft)(UA + AU/3K) .
XCOS ---jjfcL--+ po + UpTft)K3--
m Jl где К a, - коэффициент, равный по величине
магнитному потоку синхронного двигателя;
Кь - коэффициент усиления выпрямителя; К2 и Кз - коэффициенты пропорциональности.
UMy Кь Ае,
где Ае, - величина среднего напряжения за период дискретности, вызванная скачкообразным изменением ЭДС. Величина его определяется по формуле
(t)-ft(t)dt,
гдее-i em sin (tot po )- ЭДС двигателя до коммутации;
2л е 2 е m s n ( У t ТгГ) ЭДС Двига
теля после коммутации.
После интегрирования получим
А . л ru)(tfl + Atb) , Ae emsin - cos v 0 +
Л
m ft)
-,„ «i-w v д ь)
+ PO- - --2z,
где At Л- время до коммутации инвертора;
а
)1а (ро+а)иЈ. г a 0,0033 при 0)ak
1-1
функция sin
о)(д-Д1ь)
с достаточной точностью может быть аппроксимирована ft)(tfl -Atjg) ft(V-Atff)
Производим замену
- Ud .
sin
V. Aty3 AUpKi/K2;
wj arcsln -Д% + UprftJ Кз ы
Таким образом, угол управления вымителя для компенсации должен быть личен на величину
л
Лл. Ц.у
ДСЕ -тз- чсифу
Кф5)П
m
Kb Ксифу
й/г(Щ-АиВк
pu)(Ud+AU/3- К) X cos -iп и г-- -f arcsln.
()
+
+Ц,т УКз-Ј,
где Ud напряжение возбуждения.
Управление вентильным электродвигателем с помощью предлагаемого устройства позволит компенсировать скачкообразное изменение ЭДС инвертора, что приводит к устранению бросков тока в электроприводе, повышению точности и качества регулирования тока по частоте вращения.
Ф о р м у л а и з о б р е т е н и я
Устройство для управления вентильным электродвигателем, выполненным на базе, синхронной машины, содержащее последовательно соединенные между собой управляемый выпрямитель, дроссель и инвертор, m-фазный выход которого служит для подключения к m-фазной якорной обмотке син- хронной машины, последовательно соединенные между собой задатчик частоты вращения, регулятор частоты вращения, снабженный вторым входом обратной связи по частоте вращения, регулятор тока, снабженный вторым входом, и систему импульс- но-фазового управления, выход которой подключен к управляющему входу управляемого выпрямителя, датчик тока, установленный в выходной цепи управляемого выпрямителя и выходом подключенный к второму входу регулятора тока, распределитель импульсов, выходом подключенный к управляющему входу инвертора, а входом - к выходу первого компаратора, интегратор с шунтирующим его ключом сброса, вход интегратора объединен с вторым входом обратной связи по частоте вращения регулятора частоты вращения, нуль-орган, вход которого подключен к m-фазному выходу инвертора, а выход через элемент временной задержки соединен с управляющим входом ключа сброса интегратора, первый источник опорного напряжения, отличающееся тем, что, с целью повышения качества управления путем снижения бросков тока на период дискретности выпрямителя, система импульсно-фазового управления снабжена вторым управляющим входом и вторым выходом и введены датчик частоты вращения для установки его ротора на валу синхронной машины, датчик
ЭДС, включенный параллельно входу инвертора, последовательно соединенные между собой первый делитель, первый нелинейный элемент с характеристикой типа арксинус, первое запоминающее устройство, снабженное вторым входом, первый сумматор, снабженный вторым и третьим входами, второй нелинейный элемент с характеристикой типа косинус, первый блок умножения, масштабный усилитель и управляемый ключ, свободный вывод которого соединен с вторым управляющим входом системы импульсно-фазового управления, второе запоминающее устройство с двумя входами, второй делитель, второй сумматор с тремя входами, третье запоминающее устройство с двумя входами, третий, четвертый, пятый двухвходовые сумматоры, второй, третий, четвертый блоки умножения, второй и третий компараторы, логическая схема И, второй источник опорного напряжения, входы третьего сумматора соединены соответственно с выходами датчика тока и интегратора, а выход - с входом первого компаратора и первым входом второго запоминающего устройства, первый вход третьего запоминающего устройства подключен к выходу датчика частоты вращения, вторые входы упомянутых запоминающих устройств объединены и подключены к второму выходу системы импульсно-фазового управления, выход второго сумматора подключен к входу второго компаратора и к первым входам четвертого и пятого сумматоров, вторые входы которых
. % щ
В
0
5
0
5
0
объединены с вторым входом второго сумматора и подключены к выходу первого источника опорного напряжения, а выходы - соответственно к первым входам второго и третьего блоков умножения, вторые входы которых объединены с вторым входом четвертого блока умножения и вторым входом второго делителя и подключены к выходу третьего запоминающего устройства, первый вход четвертого блока умножения соединен с третьим входом второго сумматора и с выходом регулятора тока, выход четвертого блока умножения соединен с вторым входом первого сумматора, третий вход которого подключен к выходу второго блока умножения, а выход третьего блока умножения - к второму входу первого блока умножения, выход второго источника опорного напряжения соединен с первым входом третьего компаратора, второй вход которого объединен с вторым входом обратной связи по частоте вращения регулятора частоты вращения и подключен к выходу датчика частоты вращения, с которым соединен первый вход первого делителя, вторым входом подключенного к выходу датчика ЭДС, выходы второго и третьего компараторов соединены с входами логической схемы И, выход которой подключен к управляющему входу управляемого ключа.
4/

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод переменного тока | 1985 |
|
SU1292157A1 |
| Асинхронный электропривод | 1989 |
|
SU1697252A1 |
| Вентильный электропривод | 1985 |
|
SU1274105A1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Способ регулирования частоты резонансного инвертора | 1988 |
|
SU1690133A1 |
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| Цифровой электропривод постоянного тока | 1989 |
|
SU1644347A1 |
| Вентильный электродвигатель | 1986 |
|
SU1390763A1 |
| Способ защиты обмотки якоря электродвигателя от перегрева и устройство для его осуществления | 1984 |
|
SU1279010A1 |
Изобретение относится к электротехнике. Целью изобретения является повышение качества управления путем снижения бросков тока на период дискретности выпрямителя. С этой целью в устройство для управления вентильным электродвигателем, выполненным на базе синхронной машины, введены датчик 17 частоты вращения, нуль-орган 14 на выходе инвертора 3 синхронной машины 4, датчик ЭДС 18 на входе инвертора 3, нелинейные элементы 20 и 23, запоминающие устройства 21,27,30, сумматоры 31 - 33, блоки умножения 34 - 36, делители 19 и 28, компараторы 37 и 38, элемент И 39 и ключ 26. Указанные элементы обеспечивают формирование на выходе системы 8 импульсно-фазового управления такого угла опережения, который дает возможность скомпенсировать скачкообразное изменение ЭДС инвертора 3 и снизить броски тока в двигателе. 2 ил. (/ с о СО О О ч 00 Уа
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления инвертором вентильного двигателя | 1982 |
|
SU1094130A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
