1
(21)4689060/07
(22) 04.05.89
(46)23.04.91. Бюл. №15
(71) Новосибирский электротехнический ин
ститут
(72) А.А. Кромм и Г.М. Симаков
(53)621.316.718.5(088.8)
(56) Авторское свидетельство СССР
№,1176435, кл. Н 02 Р 5/06.1984.
Авторское свидетельство СССР № 1399880, кл. Н 02 Р 5/16, 1987.
(54) ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА (57) Изобретение относится к электротехнике и может быть использовано в цифровых электроприводах постоянного тока. Целью изобретения является уменьшение пульсаций скорости. Устройство содержит последовательно соединенные электродвигатель 1, импульсный датчик 2, измеритель 3 частоты вращения, а также последовательно соединенные первый сумматор 4, интегратор 5, блок 6 ключей, цифроаналоговый делитель 7. Поддержание заданного значения пулв- саций тока обеспечивается регулирова; нием частоты широтно-импульсного преобразователя 13 и соответствующим изменением напряжения регулируемым источником 14. 2 ил.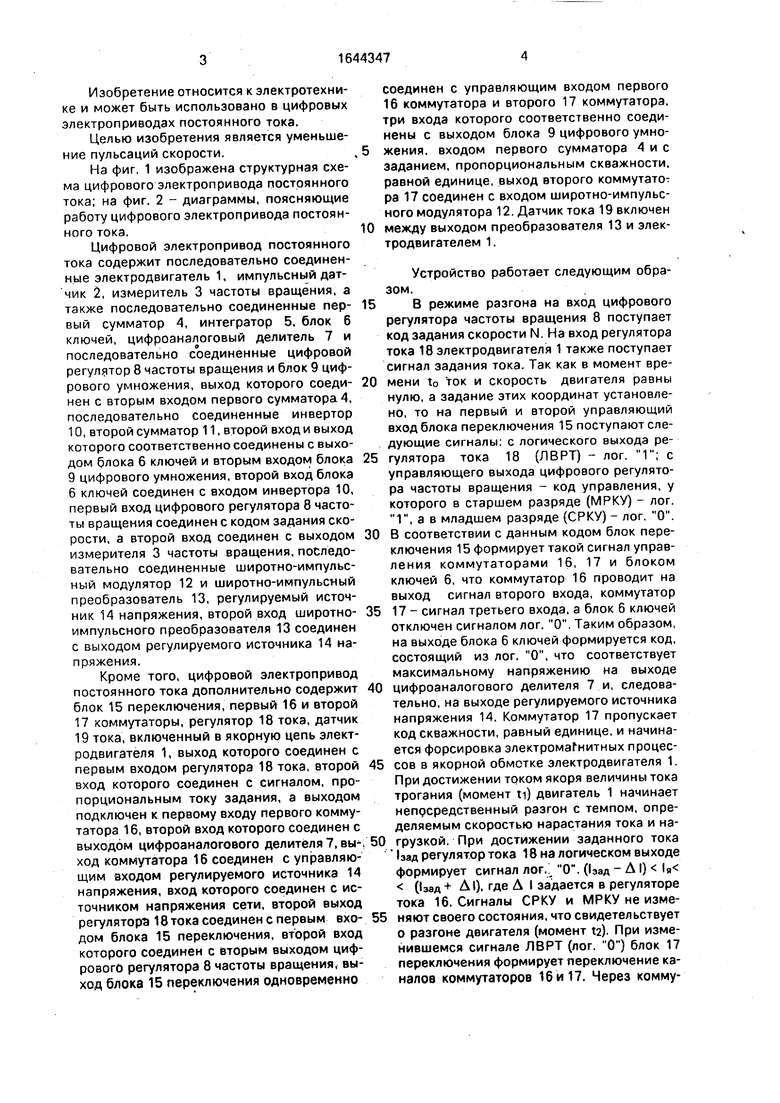
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электропривод постоянного тока | 1986 |
|
SU1399880A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Цифровой электропривод постоянного тока | 1982 |
|
SU1117809A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| ЭЛЕКТРОСТИМУЛЯТОР | 1993 |
|
RU2121380C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВОЙНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2037263C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| Электропривод переменного тока | 1986 |
|
SU1334342A1 |
fonm
fe
к
vi
Изобретение относится к электротехнике и может быть использовано в цифровых электроприводах постоянного тока.
Целью изобретения является уменьшение пульсаций скорости.
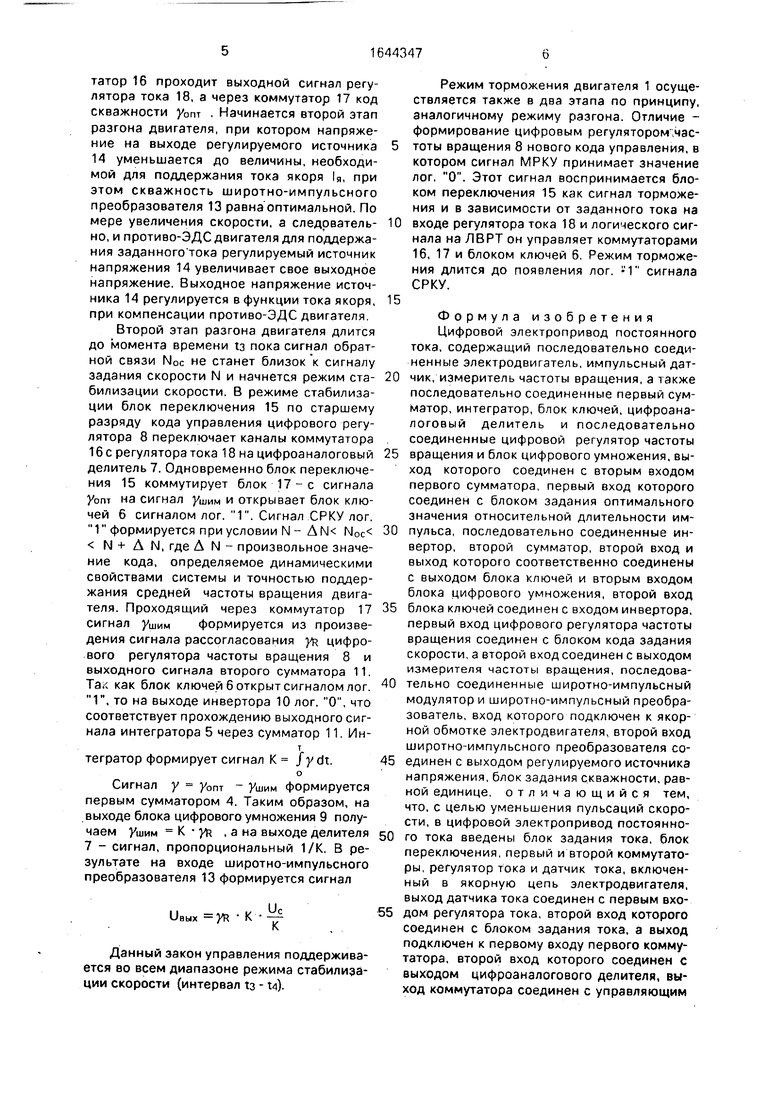
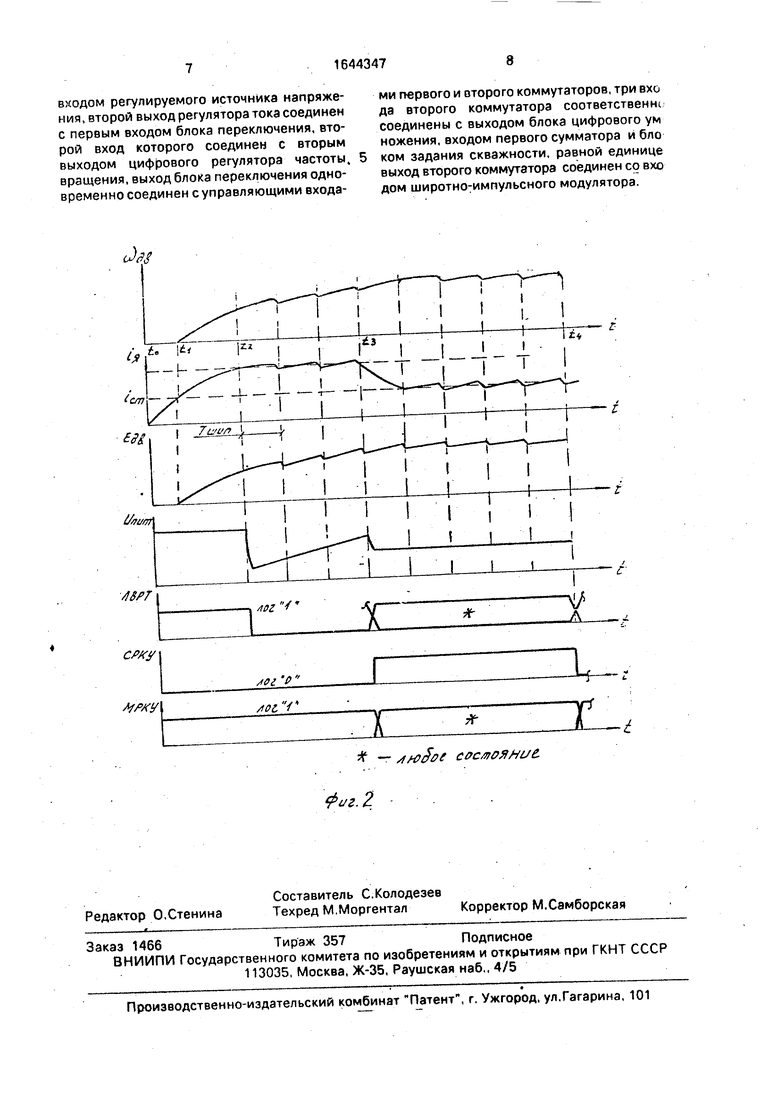
На фиг. 1 изображена структурная схема цифрового электропривода постоянного тока; на фиг. 2 - диаграммы, поясняющие работу цифрового электропривода постоянного тока.
Цифровой электропривод постоянного тока содержит последовательно соединенные электродвигатель 1, импульсный датчик 2, измеритель 3 частоты вращения, а также последовательно соединенные первый сумматор 4, интегратор 5, блок 6 ключей, цифроаналоговый делитель 7 и последовательно соединенные цифровой регулятор 8 частоты вращения и блок 9 цифрового умножения, выход которого соединен с вторым входом первого сумматора 4, последовательно соединенные инвертор 10, второй сумматор 11, второй вход и выход которого соответственно соединены с выходом блока 6 ключей и вторым входом блока 9 цифрового умножения, второй вход блока 6 ключей соединен с входом инвертора 10, первый вход цифрового регулятора 8 частоты вращения соединен с кодом задания скорости, а второй вход соединен с выходом измерителя 3 частоты вращения, последовательно соединенные широтно-импульс- ный модулятор 12 и широтно-импульсиый преобразователь 13, регулируемый источник 14 напряжения, второй вход широтно- импульсного преобразователя 13 соединен с выходом регулируемого источника 14 напряжения.
Кроме того, цифровой электропривод постоянного тока дополнительно содержит блок 15 переключения, первый 16 и второй 17 коммутаторы, регулятор 18 тока, датчик 19 тока, включенный в якорную цепь электродвигателя 1, выход которого соединен с первым входом регулятора 18 тока, второй вход которого соединен с сигналом, пропорциональным току задания, а выходом подключен к первому входу первого коммутатора 16, второй вход которого соединен с выходом цифроаналогового делителя,вы-, ход коммутатора 16 соединен с управляющим входом регулируемого источника 14 напряжения, вход которого соединен с источником напряжения сети, второй выход регулятора 18 тока соединен с первым входом блока 15 переключения, второй вход которого соединен с вторым выходом цифрового регулятора 8 частоты вращения, выход блока 15 переключения одновременно
соединен с управляющим входом первого 16 коммутатора и второго 17 коммутатора, три входа которого соответственно соединены с выходом блока 9 цифрового умножекия. входом первого сумматора 4 и с заданием, пропорциональным скважности, равной единице, выход второго коммутатора 17 соединен с входом широтно-импульс- ного модулятора 12. Датчик тока 19 включен
между выходом преобразователя 13 и электродвигателем 1.
Устройство работает следующим образом.
В режиме разгона на вход цифрового регулятора частоты вращения 8 поступает код задания скорости N. На вход регулятора тока 18 электродвигателя 1 также поступает сигнал задания тока. Так как в момент времени to ток и скорость двигателя равны нулю, а задание этих координат установлено, то на первый и второй управляющий вход блока переключения 15 поступают следующие сигналы: с логического выхода регулятора тока 18 (ЛВРТ) - лог. с управляющего выхода цифрового регулятора частоты вращения - код управления, у которого в старшем разряде (МРКУ) - лог. 1, а в младшем разряде (СРКУ) - лог. О.
В соответствии с данным кодом блок переключения 15 формирует такой сигнал управления коммутаторами 16, 17 и блоком ключей 6, что коммутатор 16 проводит на выход сигнал второго входа, коммутатор
17 - сигнал третьего входа, а блок 6 ключей отключен сигналом лог. О. Таким образом, на выходе блока 6 ключей формируется код, состоящий из лог. О, что соответствует максимальному напряжению на выходе
цифроаналогового делителя 7 и, следовательно, на выходе регулируемого источника напряжения 14. Коммутатор 17 пропускает код скважности, равный единице, и начинается форсировка электромагнитных процессов в якорной обмотке электродвигателя 1. При достижении током якоря величины тока трогания (момент ti) двигатель 1 начинает непрсредственный разгон с темпом, определяемым скоростью нарастания тока и нагрузкой. При достижении заданного тока
Ьад регулятор тока 18 на логическом выходе
формирует сигнал лог. О. (Эад - ДI) я
(1зад + At), где Д I задается в регуляторе
тока 16. Сигналы СРКУ и МРКУ не изменяют своего состояния, что свидетельствует о разгоне двигателя (момент t2J. При изменившемся сигнале ЛВРТ (лог. О) блок 17 переключения формирует переключение каналов коммутаторов 16 и 17. Через коммутатор 16 проходит выходной сигнал регулятора тока 18, а через коммутатор 17 код скважности у0пт . Начинается второй этап разгона двигателя, при котором напряжение на выходе регулируемого источника 14 уменьшается до величины, необходимой для поддержания тока якоря я, при этом скважность широтно-импульсного преобразователя 13 равна оптимальной. По мере увеличения скорости, а следовательно, и противо-ЭДС двигателя для поддержания заданного тока регулируемый источник напряжения 14 увеличивает свое выходное напряжение. Выходное напряжение источника 14 регулируется в функции тока якоря, при компенсации противо-ЭДС двигателя. Второй этап разгона двигателя длится до момента времени т.з пока сигнал обратной связи NOC не станет близок к сигналу задания скорости N и начнется режим стабилизации скорости. В режиме стабилизации блок переключения 15 по старшему разряду кода управления цифрового регулятора 8 переключает каналы коммутатора 16 с регулятора тока 18 на цифроаналоговый делитель 7. Одновременно блок переключения 15 коммутирует блок 17 - с сигнала УОПТ на сигнал уШим и открывает блок ключей 6 сигналом лог. 1. Сигнал СРКУ лог. 1 формируется при условии N- ДМ N0c N + Д N, где ДМ- произвольное значение кода, определяемое динамическими свойствами системы и точностью поддержания средней частоты вращения двигателя. Проходящий через коммутатор 17 сигнал УШИМ формируется из произведения сигнала рассогласования уя цифрового регулятора частоты вращения 8 и выходного сигнала второго сумматора 11. Та.с как блок ключей 6 открыт сигналом лог. Г, то на выходе инвертора 10 лог. О, что соответствует прохождению выходного сигнала интегратора 5 через сумматор 11. Инт
тегратор формирует сигнал К /у dt.
о
Сигнал у УОПТ - УШИМ формируется первым сумматором 4. Таким образом, на выходе блока цифрового умножения 9 получаем УШИМ К ук , а на выходе делителя 7 - сигнал, пропорциональный 1/К. В результате на входе широтно-импульсного преобразователя 13 формируется сигнал
Увых - УЙ К
Uc
К
Данный закон управления поддерживается во всем диапазоне режима стабилизации скорости (интервал t3 -1).
Режим торможения двигателя 1 осуществляется также в два этапа по принципу, аналогичному режиму разгона. Отличие - формирование цифровым регулятором ,час- 5 тоты вращения 8 нового кода управления, в котором сигнал МРКУ принимает значение лог. О. Этот сигнал воспринимается блоком переключения 15 как сигнал торможения и в зависимости от заданного тока на
0 входе регулятора тока 18 и логического сигнала на ЛВРТ он управляет коммутаторами 16, 17 и блоком ключей 6. Режим торможения длится до появления лог. «1 сигнала СРКУ.
5
Формула изобретения Цифровой электропривод постоянного тока, содержащий последовательно соединенные электродвигатель, импульсный дат0 чик, измеритель частоты вращения, а также последовательно соединенные первый сумматор, интегратор, блок ключей, цифроаналоговый делитель и последовательно соединенные цифровой регулятор частоты
5 вращения и блок цифрового умножения, выход которого соединен с вторым входом первого сумматора, первый вход которого соединен с блоком задания оптимального значения относительной длительности им0 пульса, последовательно соединенные инвертор, второй сумматор, второй вход и выход которого соответственно соединены с выходом блока ключей и вторым входом блока цифрового умножения, второй вход
5 блока ключей соединен с входом инвертора, первый вход цифрового регулятора частоты вращения соединен с блоком кода задания скорости, а второй вход соединен с выходом измерителя частоты вращения, последова0 тельно соединенные широтно-импульсный модулятор и широтно-импульсный преобразователь, вход которого подключен к якорной обмотке электродвигателя, второй вход широтно-импульсного преобразователя со5 единен с выходом регулируемого источника напряжения, блок задания скважности, равной единице, отличающийся тем, что, с целью уменьшения пульсаций скорости, в цифровой электропривод постоянно0 го тока введены блок задания тока, блок переключения, первый и второй коммутаторы, регулятор тока и датчик тока, включенный в якорную цепь электродвигателя, выход датчика тока соединен с первым вхо5 дом регулятора тока, второй вход которого соединен с блоком задания тока, а выход подключен к первому входу первого коммутатора, второй вход которого соединен с выходом цифроаналогового делителя, выход коммутатора соединен с управляющим
входом регулируемого источника напряжения, второй выход регулятора тока соединен с первым входом блока переключения, второй вход которого соединен с вторым
выходом цифрового регулятора частоты. 5 ком задания скважности, равной единице вращения, выход блока переключения одно- выход второго коммутатора соединен со вхо временно соединен с управляющими входа- дом широтно-импульсного модулятора.
1/яи/я
Фиг. 2
ми первого и второго коммутаторов, три вхо да второго коммутатора соответствент соединены с выходом блока цифрового ум ножения, входом первого сумматора и бло
% - л/0/0г с PC/ПОЯние.
